Les formes de la limite d'espace / zone sont définies selon les éléments suivants :
Élément
Description
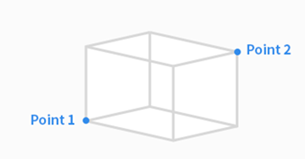
Cuboid
La forme de la limite d'espace / zone est définie comme un cuboïde.
Saisissez l'extrémité inférieure (Point 1) et l'extrémité supérieure (Point 2) du cuboïde et appuyez sur le bouton Save Pose (Enregistrer la position).
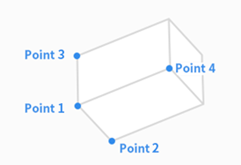
Tilted Cuboid
La forme de la limite d'espace / zone est définie comme un cuboïde incliné.
Saisissez le point de référence (Point 1), le point d'extrémité de l'axe x (Point 2), le point d'extrémité de l'axe y (Point 3), le point d'extrémité de l'axe z (Point 4) du cuboïde incliné et appuyez sur le bouton Save Pose (Enregistrer la position).
Les trois lignes (point 1-point2, point 1-point 3, point 1-point 4) doivent se croiser à angle droit. (une déviation de +/- 5 degrés est acceptable)
L'utilisation de Constraint Motion (Mouvement des contraintes) de « Surface Lock » (Verrou de surface) et « Axis Lock » (Verrou d'axe) basé sur le point 1 aidera le robot à obtenir plus facilement le point 2, le point 3 et le point 4.
Cylinder
La forme de la limite d'espace / zone est définie comme un cylindre.
Saisissez le point à la distance d'un rayon, le point du plan supérieur et le point du plan inférieur du cylindre, puis appuyez sur le bouton Save Pose (Enregistrer la position).
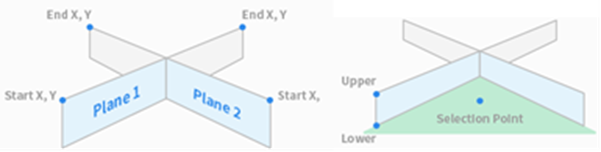
Multi-plane Box
La forme de la limite d'espace / zone est définie comme un boîtier multi-plan.
Définissez la hauteur des parties supérieures et inférieures du boîtier multi-plan et appuyez sur le bouton Add Pose (Ajouter position) pour ajouter un plan.
Sélectionnez les coordonnées X et Y pour définir la direction du plan, puis appuyez sur le bouton Save Pose (Enregistrer la position). Il est possible de configurer jusqu'à six plans.
Définissez les coordonnées pour les points de la zone à configurer.
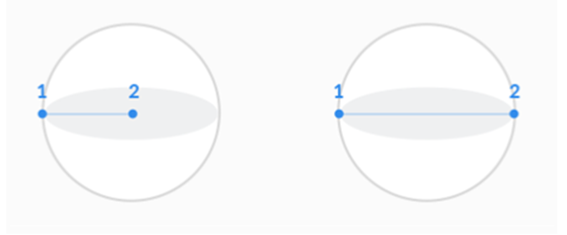
Sphere
La forme de la limite d'espace / zone est définie comme une sphère.
Pour configurer le rayon, saisissez les positions du point central et de l'extrémité de la sphère, et pour configurer le diamètre, saisissez deux points d'extrémité de la sphère, puis appuyez sur le bouton Save Pose (Enregistrer la position).
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.