Pour déplacer le robot selon les coordonnées Monde, procédez comme suit :
Sélectionnez l'onglet Task (Tâche) dans l'écran Jog.
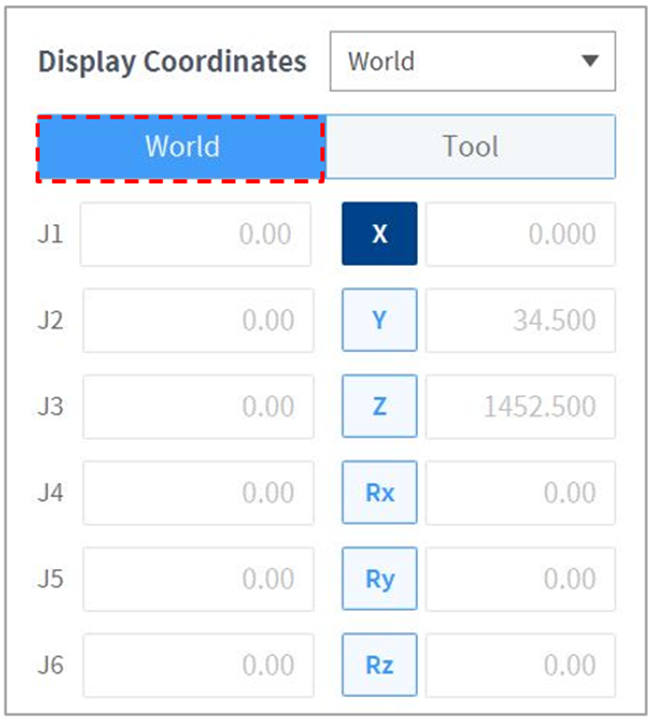
Sélectionnez les coordonnées d'affichage à utiliser en tant que coordonnées Monde et sélectionnez World (Monde) comme point de référence des coordonnées de tâche.
Sélectionnez World Coordinates (Coordonnées Monde) pour procéder au déplacement.
Maintenez enfoncé le bouton Direction( , )pour déplacer l'axe correspondant.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.