
Exécution en fonction de l'articulation
Pour ajuster l'angle en fonction de l'articulation du robot, procédez comme suit :
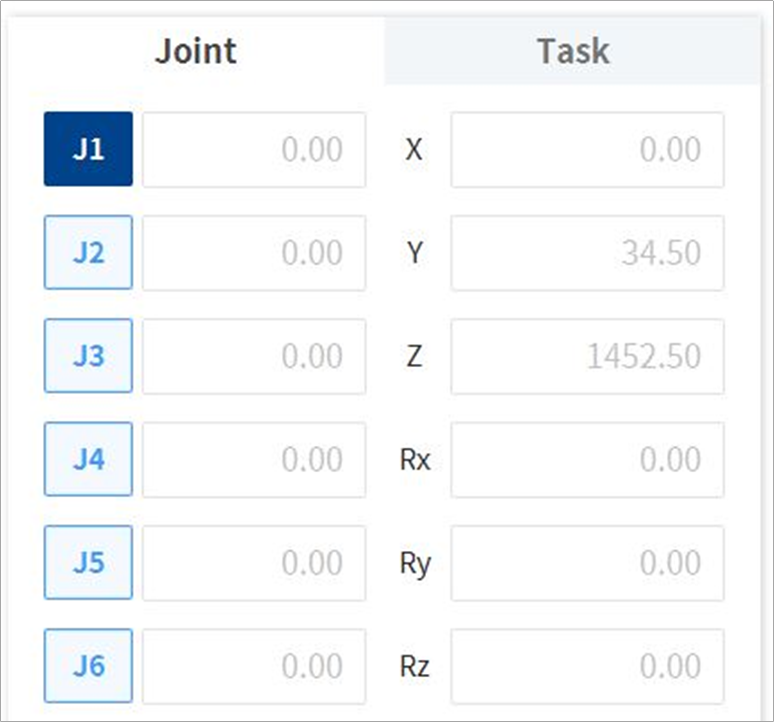
- Sélectionnez l'onglet Joint dans l'écran Joint.
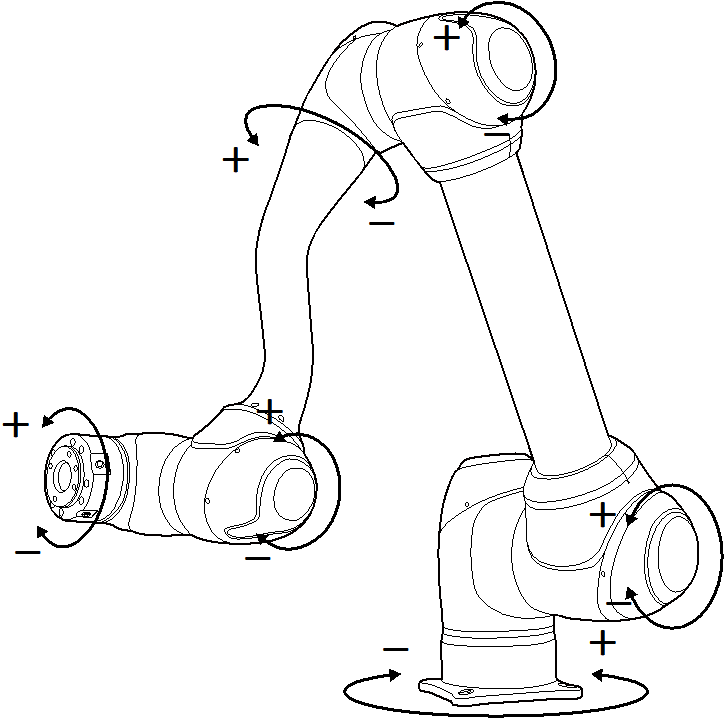
- Sélectionnez l'axe (J1-J6) pour ajuster l'angle.
- Maintenez enfoncé le bouton Direction(


Remarque
La zone de sécurité n'est pas appliquée en mode virtuel.