
Elément de cellule de travail - Ajouter une pose d'installation de robot (montage)
FACULTATIF FACILE 3 MIN
La pose d'installation du robot peut être définie en ajoutant un élément de cellule de travail pose (montage) d'installation du robot. Si le robot est installé sur une surface plane, cette étape peut être ignorée.
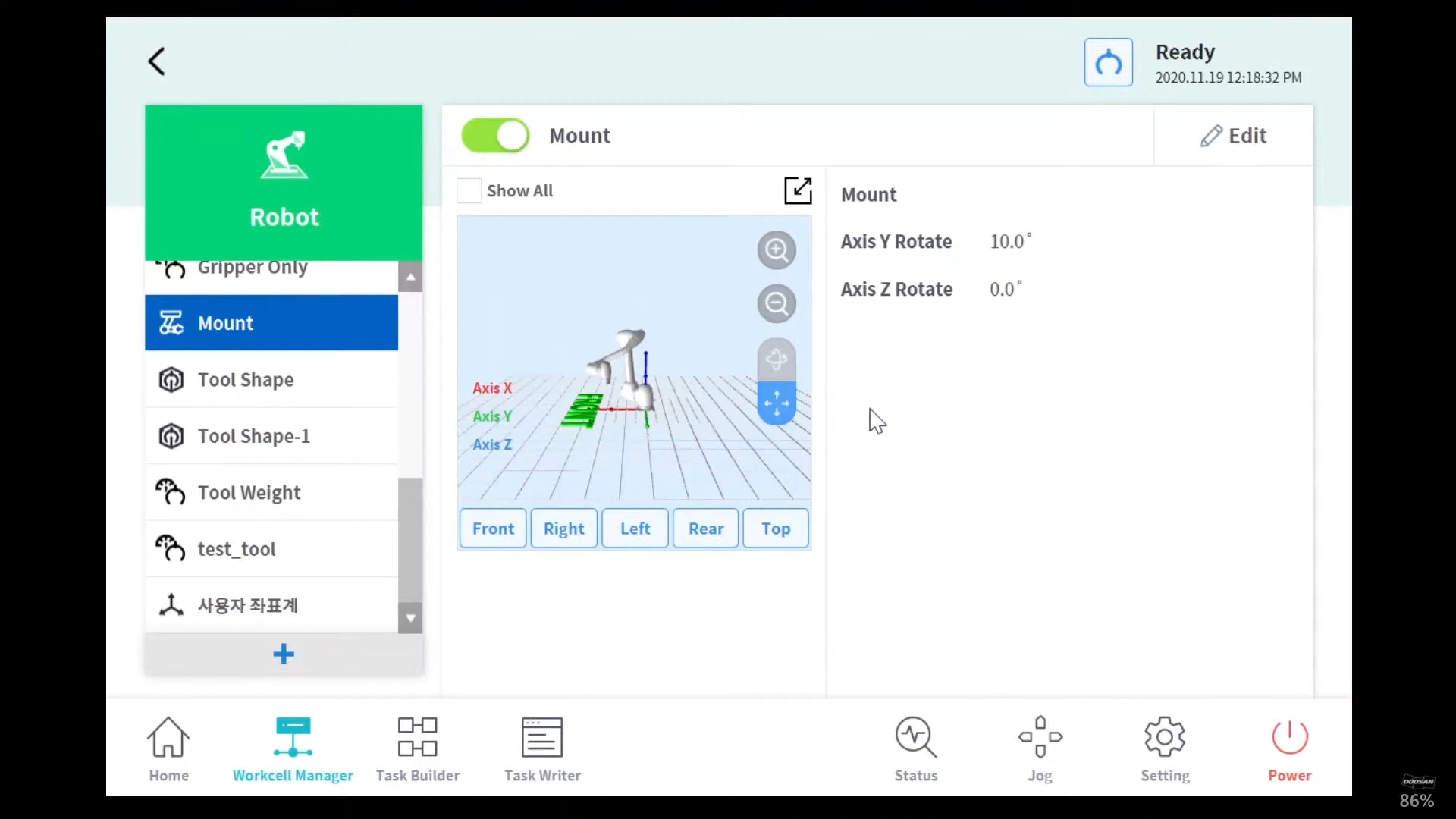
La pose de l'installation du robot peut être définie via Gestionnaire de cellules de travail > robot > 
- L'angle d'installation peut être mesuré à l'aide de la fonction de mesure automatique. Toutefois, si l'angle est inférieur à 5 degrés, la mesure automatique n'est pas disponible.
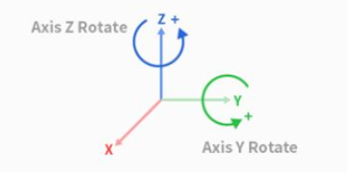
- Si le robot est installé au plafond ou sur le mur, l'angle d'installation du robot peut être défini avec les rotations de l'axe y et de l'axe Z.
- Comme le calcul automatique du poids de l'outil est effectué en fonction de la gravité, il est recommandé de réinitialiser le poids de l'outil une fois le réglage du montage effectué.
Une fois l'élément de cellule de travail enregistré (confirmé), l'interrupteur à bascule doit être activé pour pouvoir utiliser l'élément de cellule de travail.
Attention
- Lors de la définition de l'élément de cellule de travail pose (montage) de l'installation du robot, il est recommandé de modifier également les coordonnées mondiales. Si les coordonnées du monde ne sont pas modifiées, le robot pose sur l'écran du simulateur du robot de la poignée de commande d'apprentissage s'affiche comme le robot en cours d'installation sur la surface plane (basique).