Démarrage du système
Une fois le système sous tension, il démarre. Une fois le démarrage terminé, l'application du système s'affiche sur le boîtier d'apprentissage. Pour plus d'informations à propos de l'application du système, référez-vous à «Configuration de l'écran du programme».
Remarque
- Servo On (Servo activé) : Pour modifier la position du robot, son état doit être défini sur Servo On (Servo activé), dans lequel les articulations du robot sont alimentées et le robot est en état de veille. Pour plus d'informations à propos de Servo On (Servo activé), référez-vous à « Servo On (Servo activé)»
- Réglage de la date et de l'heure: La date et l'heure affichées sur le boîtier d'apprentissage et dans le message journal enregistré sur le robot suivent le réglage de date et heure du système, la date et l'heure doivent donc être configurées au moment du démarrage initial. Pour plus d'informations sur le réglage de la date et de l'heure, référez-vous à «Réglage de la date et de l'heure»
- L'utilisation de la plateforme DART permet le contrôle du robot sans le boîtier d'apprentissage.
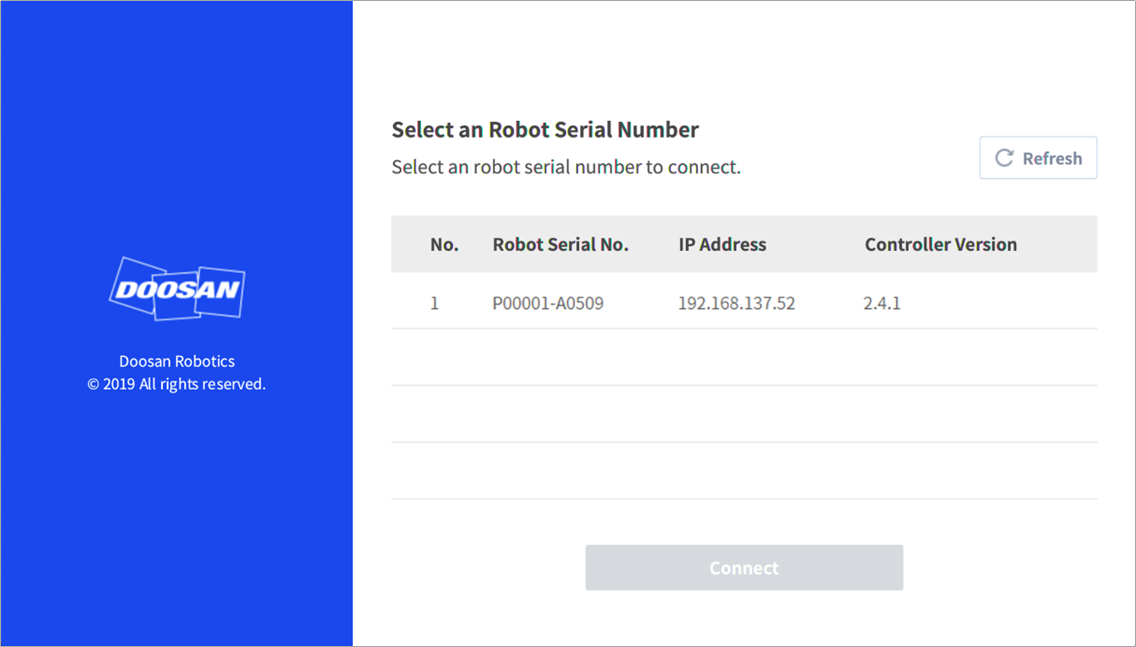
- La plateforme DART dispose d'un écran affichant le robot connecté au réseau suite au démarrage, et les processus de vérification du numéro de série du robot et de connexion du robot ont lieu sur cet écran.