
Configuration des User Coordinates (Coordonnées Utilisateur)
Permet de configurer les coordonnées qui représentent la pièce. Ces coordonnées sont appelées User Coordinates (Coordonnées Utilisateur) et sont différentes des World Coordinates (Coordonnées Monde). Il est possible de configurer la pose des coordonnées Base à l'aide des coordonnées Monde, et les coordonnées Monde peuvent être sélectionnées au cours de l'apprentissage et du mouvement en utilisant le robot dans le Task Builder (Générateur de tâches) et le Task Writer (Rédacteur de tâches). Pour configurer les Coordonnées Utilisateur, appuyez sur le bouton
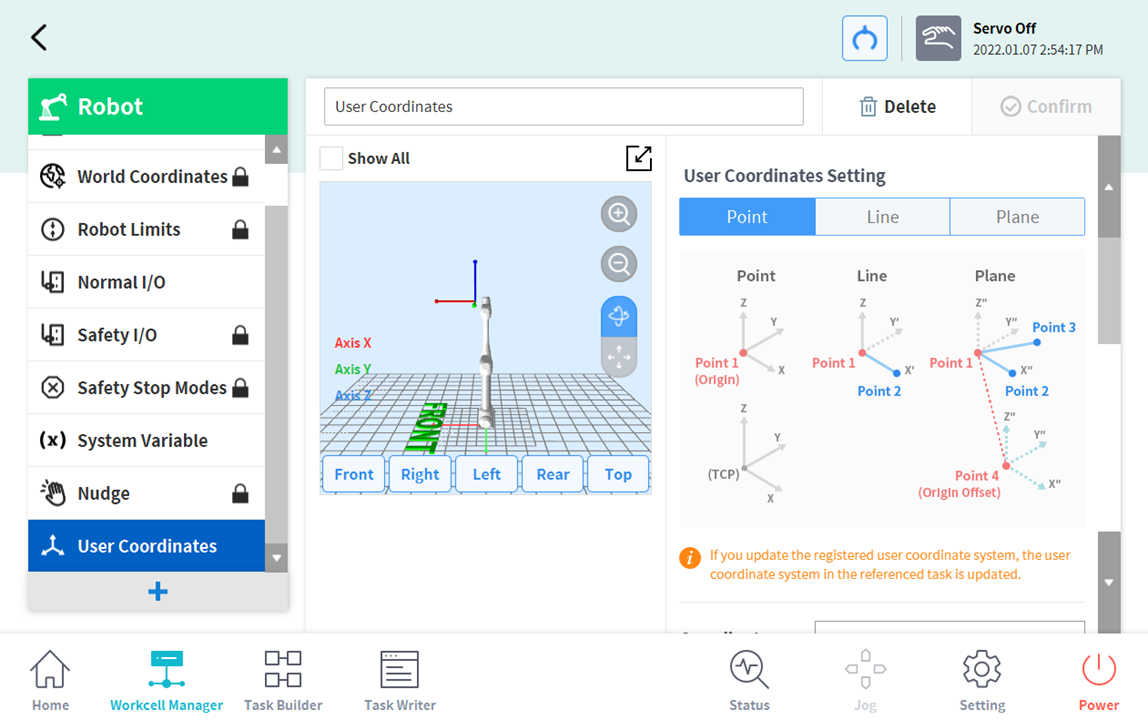
- Saisissez les valeurs requises pour la configuration.
- Veillez à lire l'image de description et les éléments de mise en garde des User Coordinates (Coordonnées Utilisateur).
- Les User Coordinates (Coordonnées Utilisateur) peuvent être créées à partir d'1 point, de 2 points et de 3 points.
- Il est possible de charger des coordonnées de palette depuis les Advanced Options (Options avancées) et de les appliquer aux points des User Coordinates (Coordonnées Utilisateur).