
Configuration de point de repère
Pour configurer le point de repère d'une commande, procédez comme suit :
- Sélectionnez le type (absolu, relatif) de coordonnée de référence et de valeur de coordonnée.
- Utilisez la fonction de jog ou réalisez directement l'apprentissage pour placer le robot dans la position souhaitée.
- Appuyez sur le bouton Save Pose (Enregistrer la position) pour enregistrer la position de l'outil du robot.
- Au besoin, définissez une variable à l'air de la commande GlobalVariables (Variables globales) ou Define (Définir).
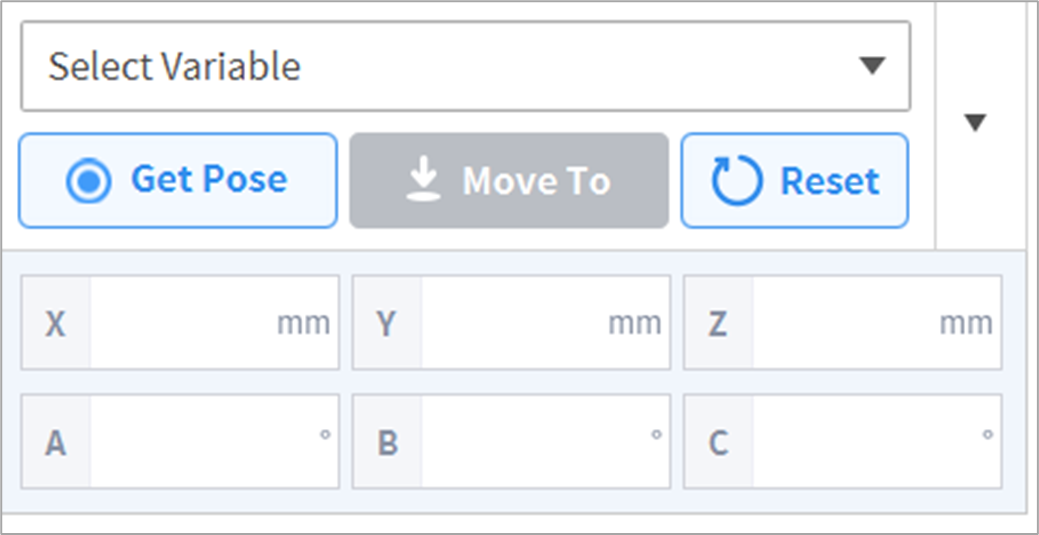
- Au besoin, définissez une variable à l'air de la commande GlobalVariables (Variables globales) ou Define (Définir).