Comprendre les propriétés de mouvement du robot
OBLIGATOIRE NORMAL 15 MIN
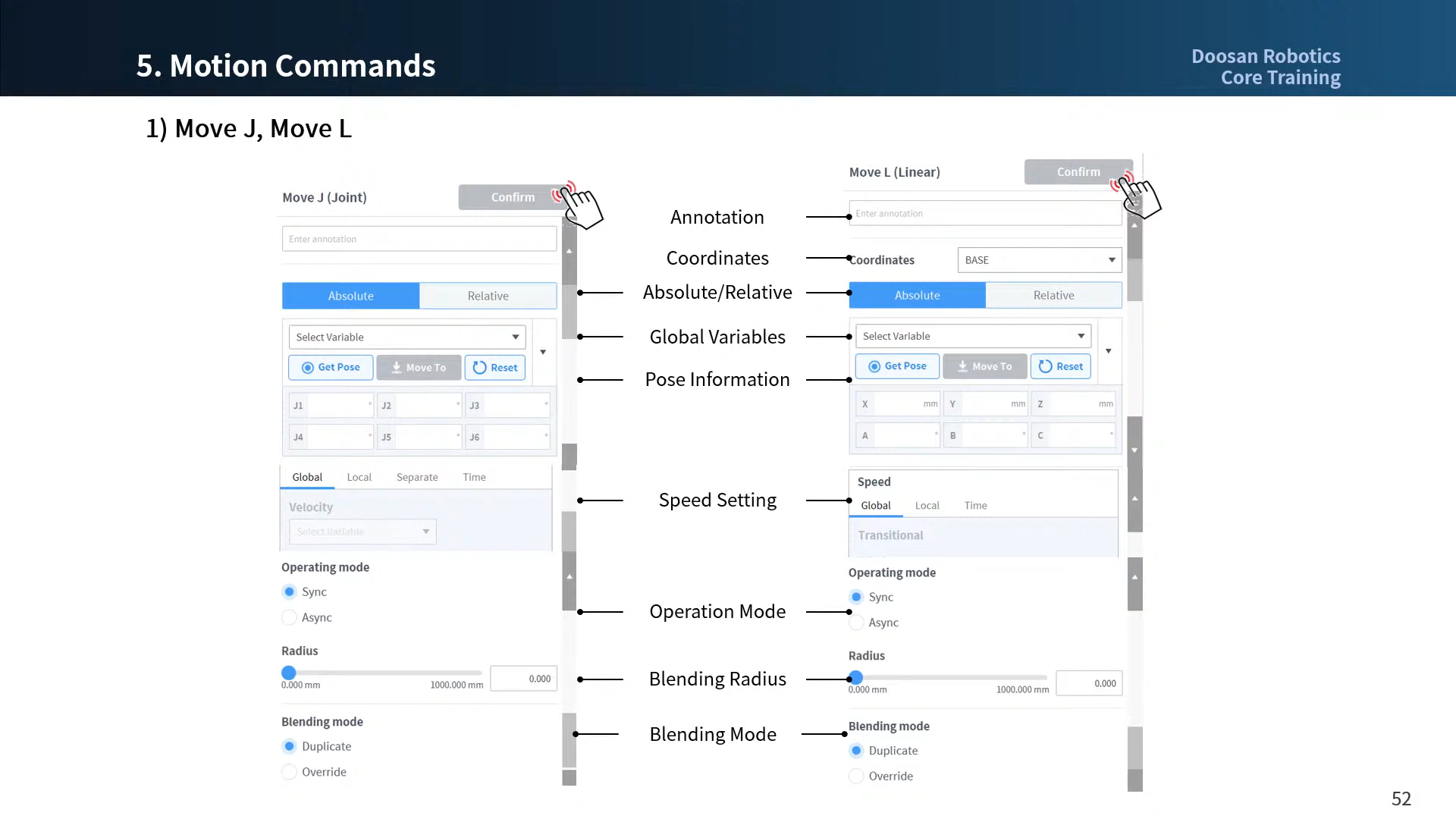
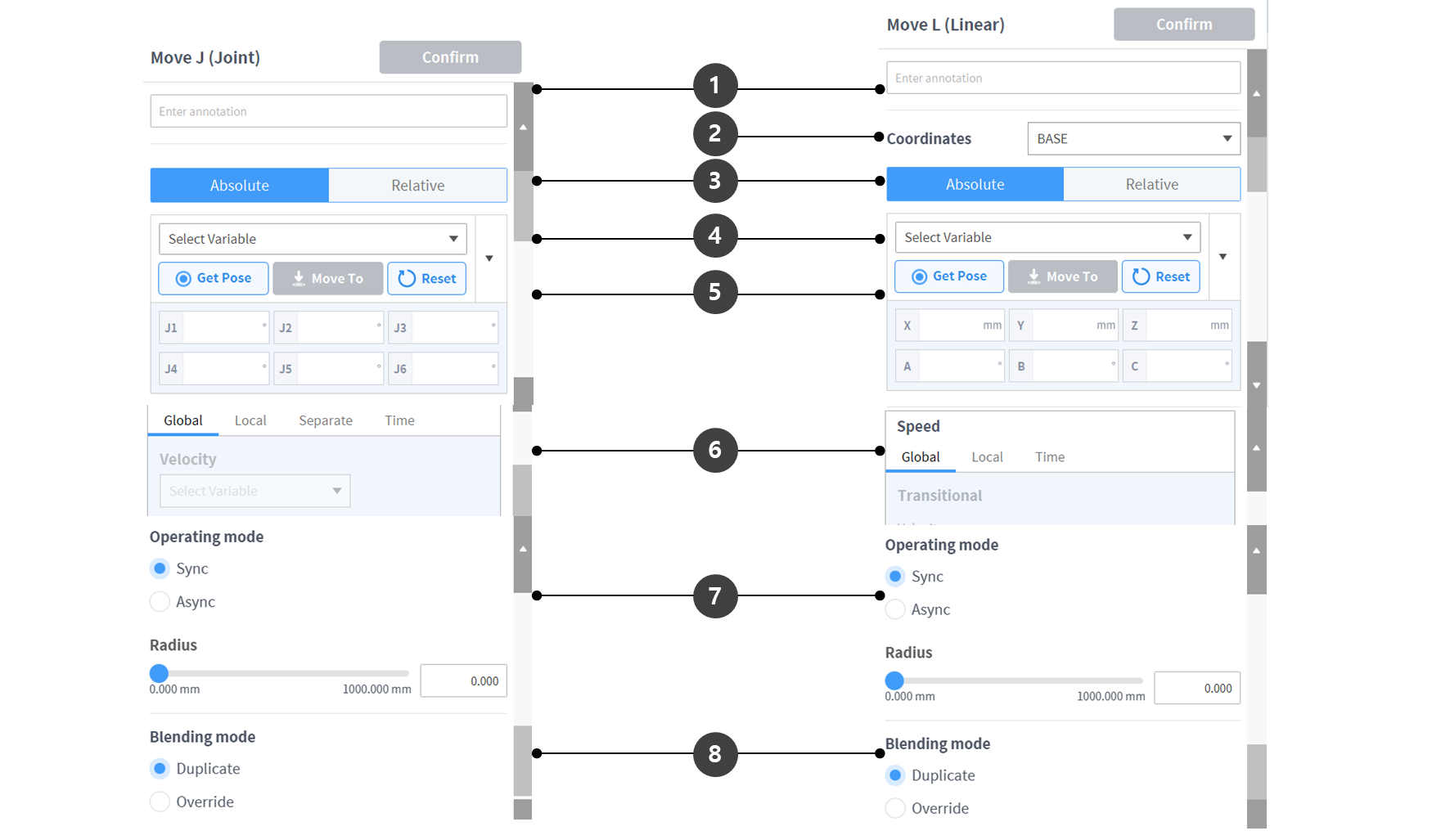
Il s'agit de l'écran des propriétés des commandes standard MoveJ et MoveL. D'autres mouvements ont également des propriétés similaires.
- Si le mouvement est créé avec des paramètres minimum, seules les informations de pose (5 dans la figure ci-dessous) doivent être saisies.
| Nom | Description | |
|---|---|---|
| 1 | Annotation | Description ou annotation de la commande qui se trouve dans la fenêtre de tâche |
| 2 | Coordonnées |
|
| 3 | Sélectionnez déplacer le type |
|
| 4 | Sélectionnez variable | Vous pouvez sélectionner des informations de pose enregistrées comme variables |
| 5 | Poser des informations | Les informations de pose sont saisies
|
| 6 | Réglage de la vitesse |
|
| 7 | Mode de fonctionnement |
|
| 8 | Mode de fusion | Option utilisée pour déterminer si le mouvement précédent doit être ignoré ou remplacé en fonction du mode de fusion du mouvement suivant lorsque le rayon est défini comme option du mouvement précédent |
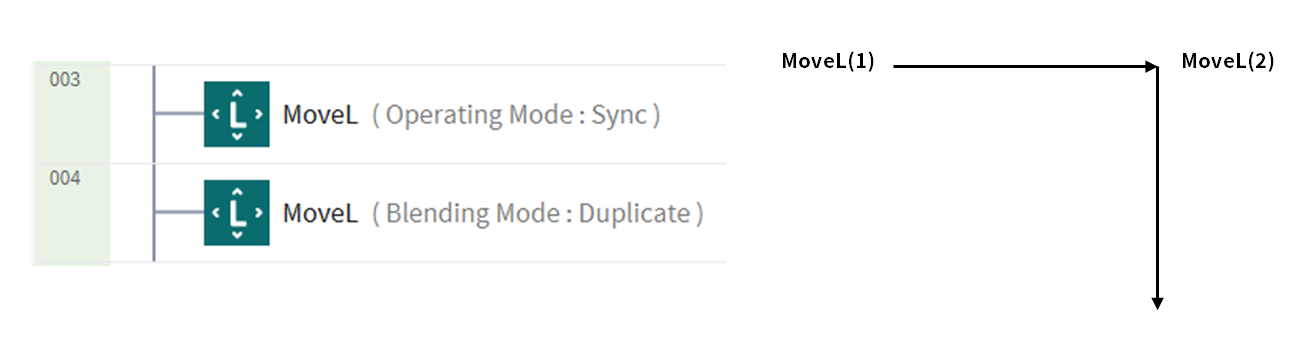
Mode de fonctionnement
Synchronisation
Vous pouvez passer à la commande suivante avec Sync lorsque la commande en cours est terminée. Il est défini par défaut et utilisé dans des situations générales.
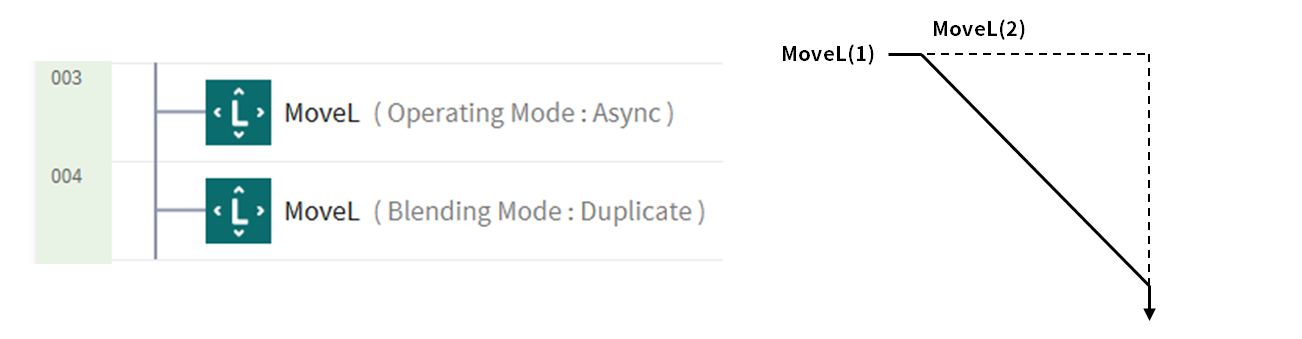
Asynchrone
Async lance simultanément la commande suivante lorsque la commande de déplacement commence. Il est utilisé pour connecter en douceur différents mouvements, et il est également utilisé lorsque la sortie du signal est activée/désactivée simultanément lorsque le mouvement commence.
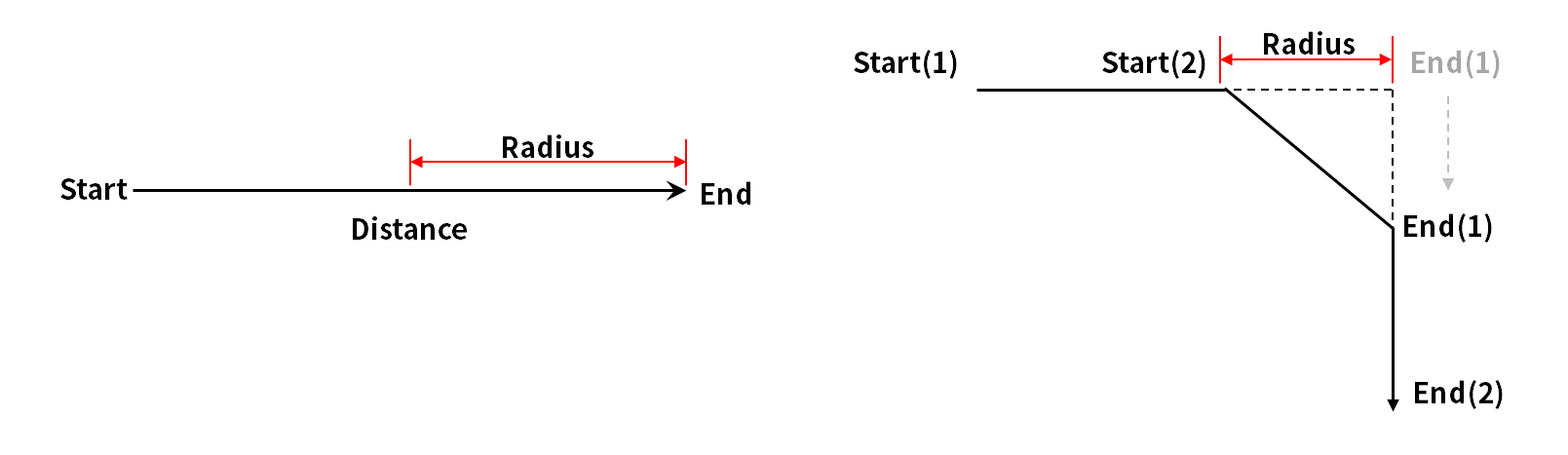
Rayon
L'option rayon active la fonction async dans la section RADIUS avant que la commande de mouvement n'atteigne son point cible. Avec cette option, il est possible de se connecter en douceur à la commande de mouvement suivante sans arrêter la commande de mouvement en cours. Le rayon est défini par défaut sur 0 mm.
Attention
L'option rayon présente les caractéristiques et les limites suivantes :
- La fonction rayon ne peut être utilisée qu'en mode de synchronisation.
- Les conditions et les calculs peuvent être effectués dans la section async dans le rayon.
- Le rayon ne peut pas dépasser 1/2 de la distance totale entre l'emplacement actuel et l'emplacement cible avant l'exécution du mouvement.
- ex. Si la distance de mouvement est de 100 mm, le rayon maximum disponible est de 50 mm.
- Les commandes de mouvement qui ne peuvent pas appliquer le fondu entre les mouvements sont les suivantes : Le raccordement est déjà appliqué dans ces commandes, donc l'application de RADIUS à ces commandes et leur exécution entraîne des erreurs. L'utilisation de commandes, telles que WaitMotion et StopMotion, permet d'éviter les erreurs.
- MoveSX, MoveSJ, MovePeriodic, MoveSpiral, MoveB
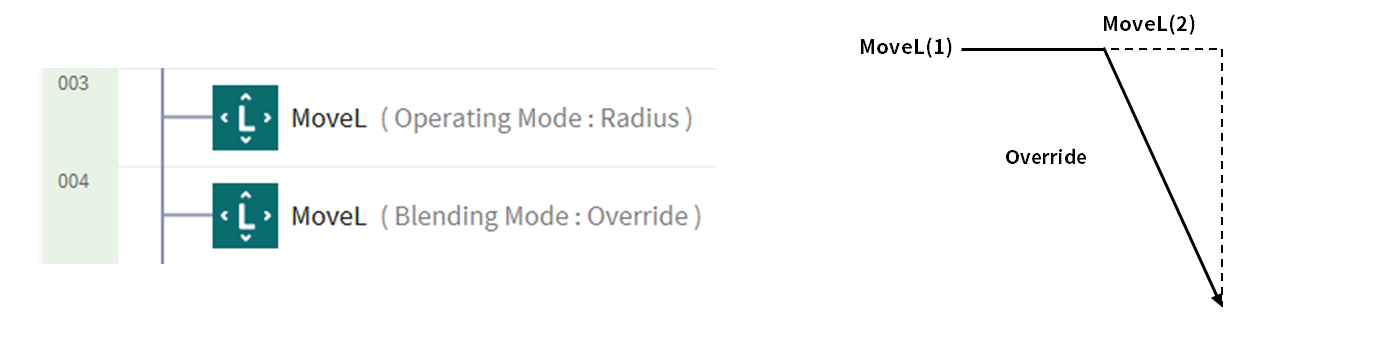
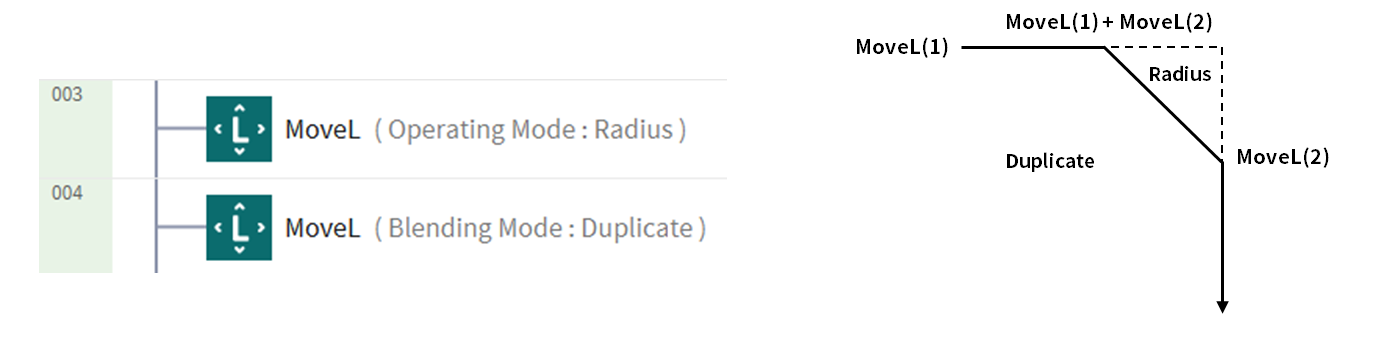
Mode de fusion
Il s'agit de l'option utilisée pour déterminer si le mouvement précédent doit être ignoré ou remplacé en fonction du mode de fusion du mouvement suivant lorsque le rayon est défini comme option du mouvement précédent.
Dupliquer
Dupliquer est un mode qui maintient le mouvement précédent pour permettre au mouvement suivant de se chevaucher avec le mouvement précédent.
Remplacer
Remplacer ignore et écrase le mouvement précédent pour exécuter le mouvement suivant.