Comprendre les principes fondamentaux des commandes de compétence
Les commandes de compétence sont basées sur quelques modèles de fonctionnement.
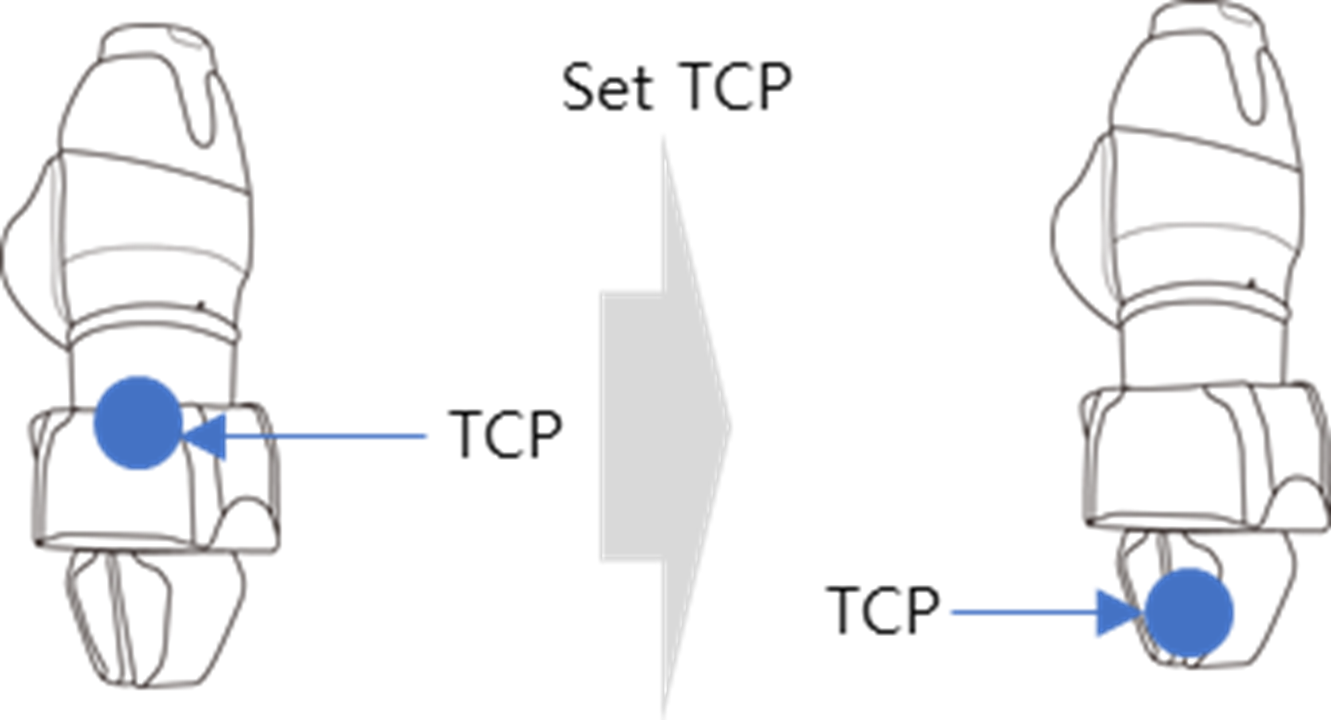
Pour qu'un robot commence à fonctionner, le poids et le point central de l'outil (TCP) de l'outil équipé sur le robot doivent être configurés, et le modèle de fonctionnement de base des commandes de compétence doivent avoir une pose d'approche et une pose de retrait perpendiculaires à la pose de référence.
Paramètre TCP : L'utilisation d'une commande de compétence d'End Effector (Effecteur final) modifiera automatiquement les paramètres de décalage TCP. L'étape d'exécution de la commande de compétence d'End Effector (Effecteur final) comprend un paramètre de décalage adapté au TCP de l'End Effector (Effecteur final). Si le décalage TCP est modifié, la fonction Mouvement de mélange, qui relie la commande de mouvement précédente, ne peut pas être utilisée.
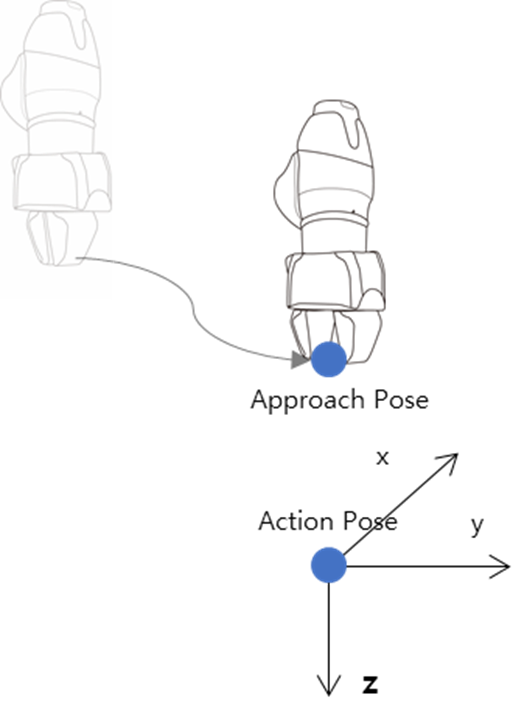
Mouvement vers la pose d'approche : Il s'agit d'un point disponible pour un mouvement vers la pose d'approche. Il est réglé sur la direction Z de la pose d'approche, une autre direction pouvant également être sélectionnée. La distance d'approche saisie est automatiquement calculée pour la pose d'action et le robot se déplace vers le point correspondant.
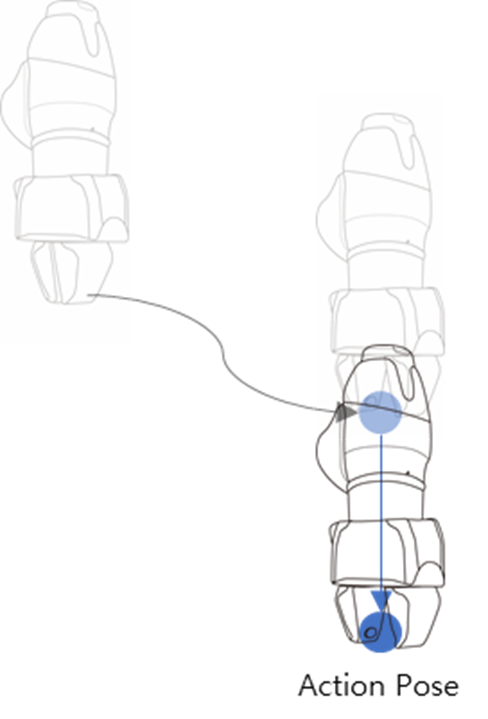
Move To Reference Pose (Passer à la pose de référence) : il s'agit du point sur la pièce où l'End Effector (Effecteur final) effectue le travail Pour définir des coordonnées détaillées autres que la vitesse et l'accélération pour la pose de référence, appuyez sur le bouton situé à droite de la pose de référence. L'utilisation de l'onglet des coordonnées relatives lors de la définition du mouvement détaillé peut néanmoins entraîner un dysfonctionnement pendant l'exécution de la compétence. Assurez-vous d'utiliser les coordonnées absolues pour l'apprentissage du point de référence.
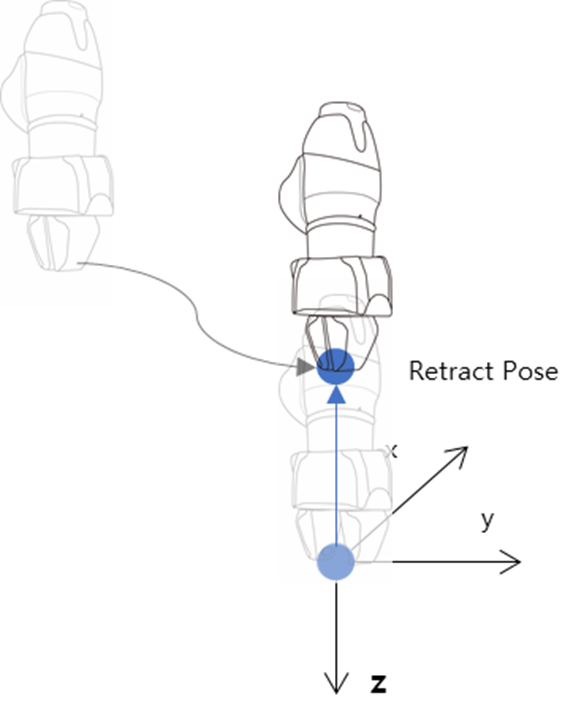
Move to Retract Pose (Passer à la pose de retrait) : il s'agit du point pour saisir la pièce et la déplacer en toute sécurité vers un autre point. Il s'agit de la direction Z de la pose d'approche, une autre direction pouvant également être sélectionnée. La distance de retrait saisie est automatiquement calculée pour la pose d'action et le robot se déplace vers le point correspondant.
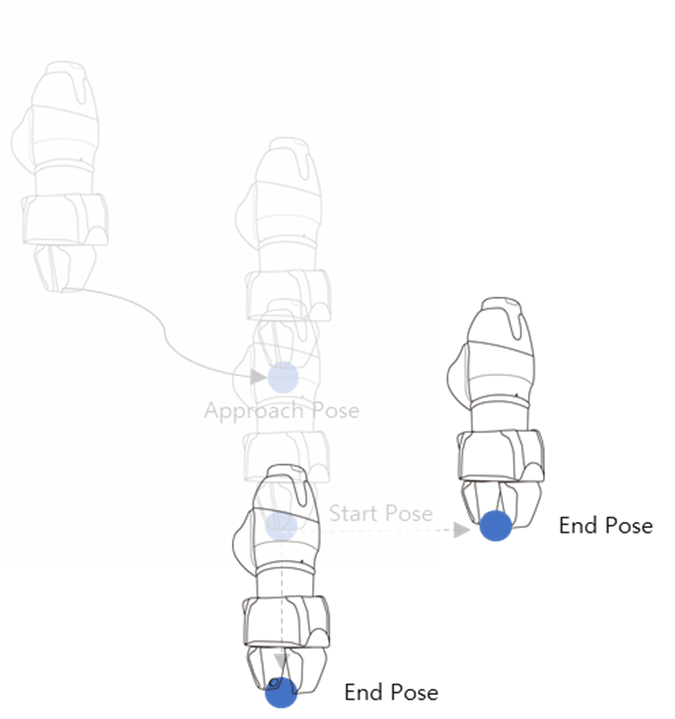
Move to Start Pose (Passer à la pose de début) : si la cible d'exécution de l'effecteur final ne se termine pas en un mouvement unique, il peut y avoir un point intermédiaire et un point final, la pose de début d'action étant le point de départ de la tâche (par ex. Door_OpenClose Skill [Compétence porte ouverte/fermée] - Start Pose [Pose de début])
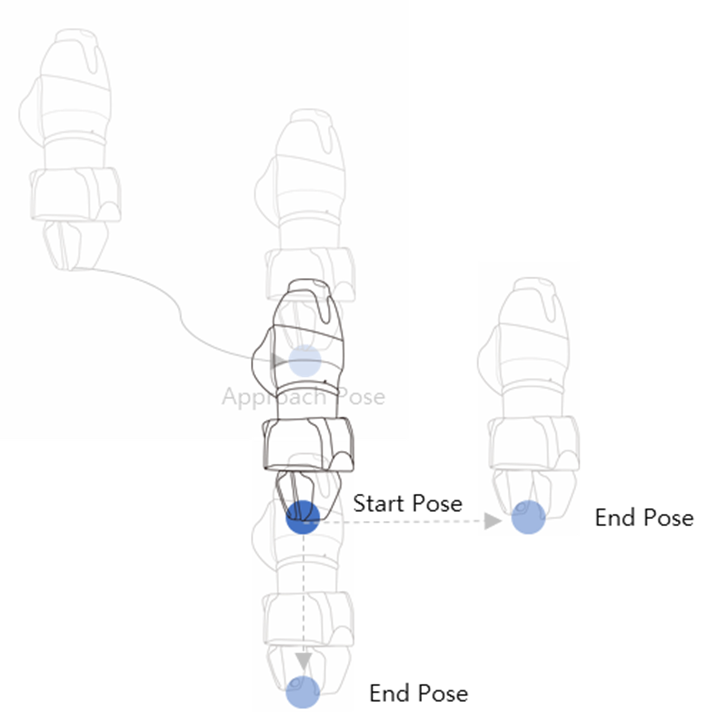
Move to End Pose (Passer à la pose de fin) : Si la cible d'exécution de l'effecteur final ne se termine pas en un mouvement unique, il peut y avoir un point intermédiaire et un point final, la pose de fin d'action étant le point final de la tâche (par ex. Door_OpenClose Skill [Compétence porte ouverte/fermée] - End Pose [Pose de fin])