Paramètres de la zone de réduction de la sensibilité à la collision
Pour définir la zone de réduction de la sensibilité à la collision, appuyez sur le bouton Ajouter 
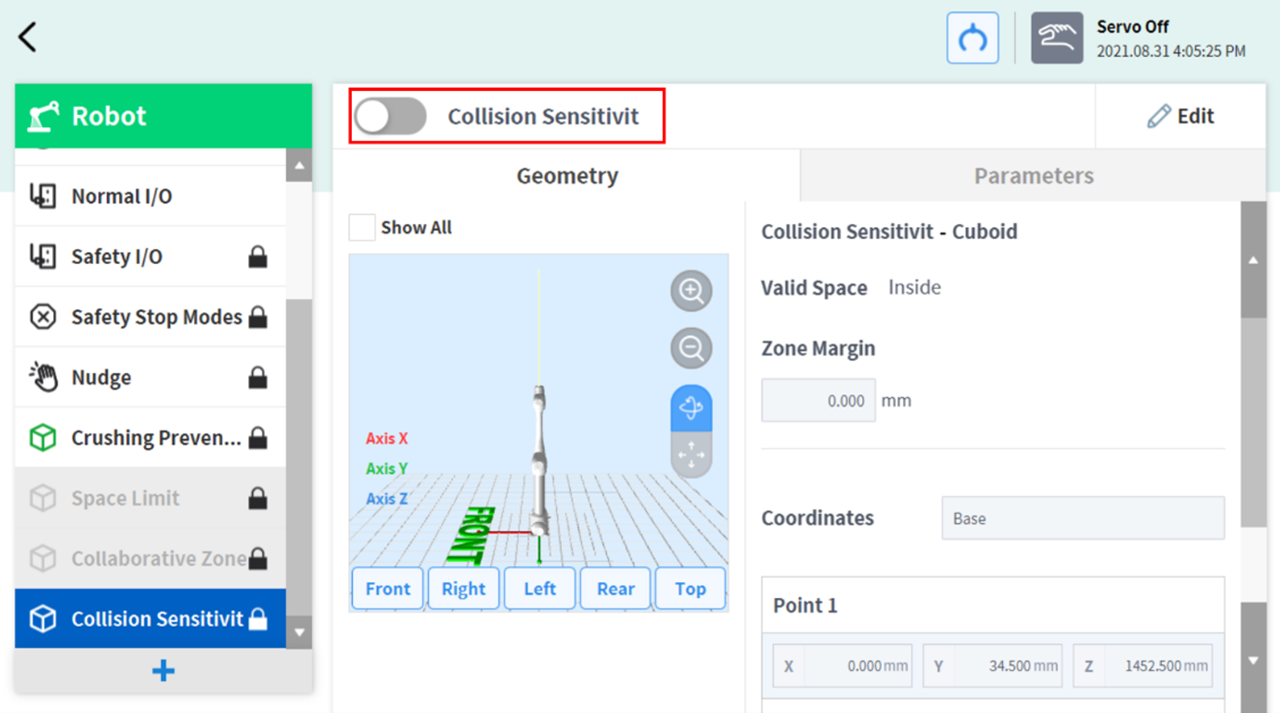
- Saisissez le nom de la cellule de travail dans le champ prévu à cet effet en haut de l'écran de paramètre de cellule de travail.
- Définissez les informations de position selon la forme de la zone ainsi que le Valid space (Espace valide) et la Zone margin (marge de zone) dans l'onglet Geometry (Géométrie).
Définissez les options Override (Contournement), TCP/Robot Limits (Limites du TCP/Robot) et Dynamic Zone Enable (Activation de la zone dynamique) dans l'onglet Parameters (Paramètres), et appuyez sur Draft (Ébauche).
Avertissement
- La zone de réduction de la sensibilité à la collision est une zone haute priorité.
- Les zones haute priorité sont prioritaires sur les autres zones et la configuration globale de Robot Limits (Limites du robot). Si plusieurs zones haute priorité s'entrecoupent, la fonction de sécurité utilise la limite de sécurité la MOINS restrictive. Pour cette raison, la zone haute priorité doit être aussi petite que possible pour garantir une sécurité optimale.
- Vérifiez que tous les paramètres affichés sont conformes aux besoins puis cochez la case Confirm draft (Confirmer ébauche) et appuyez sur Confirm (Confirmer).
- Appuyez sur le bouton à bascule d'activation pour appliquer la zone de réduction de la sensibilité à la collision.