
Configuration de Robot Limits (Limites du robot)
Permet de définir les limites de sécurité des fonctions de surveillance de la sécurité.
Remarque
- Les limites ainsi que les paramètres de sécurité peuvent varier selon la gamme du robot.
- Les limites de sécurité sont les conditions à partir desquelles la fonction de surveillance de la sécurité déclenche la fonction d'arrêt. Lorsque l'arrêt est complet, la position du robot et la force appliquée peuvent différer du seuil de sécurité configuré.
Ÿ Limites du TCP/Robot
Pour définir les limites du TCP/Robot, accédez à la cellule de travail Robot et sélectionnez Robot > Robot Limits (Limites du Robot) > TCP/Robot. L'écran de configuration des limites du TCP/Robot est composé des éléments suivants :
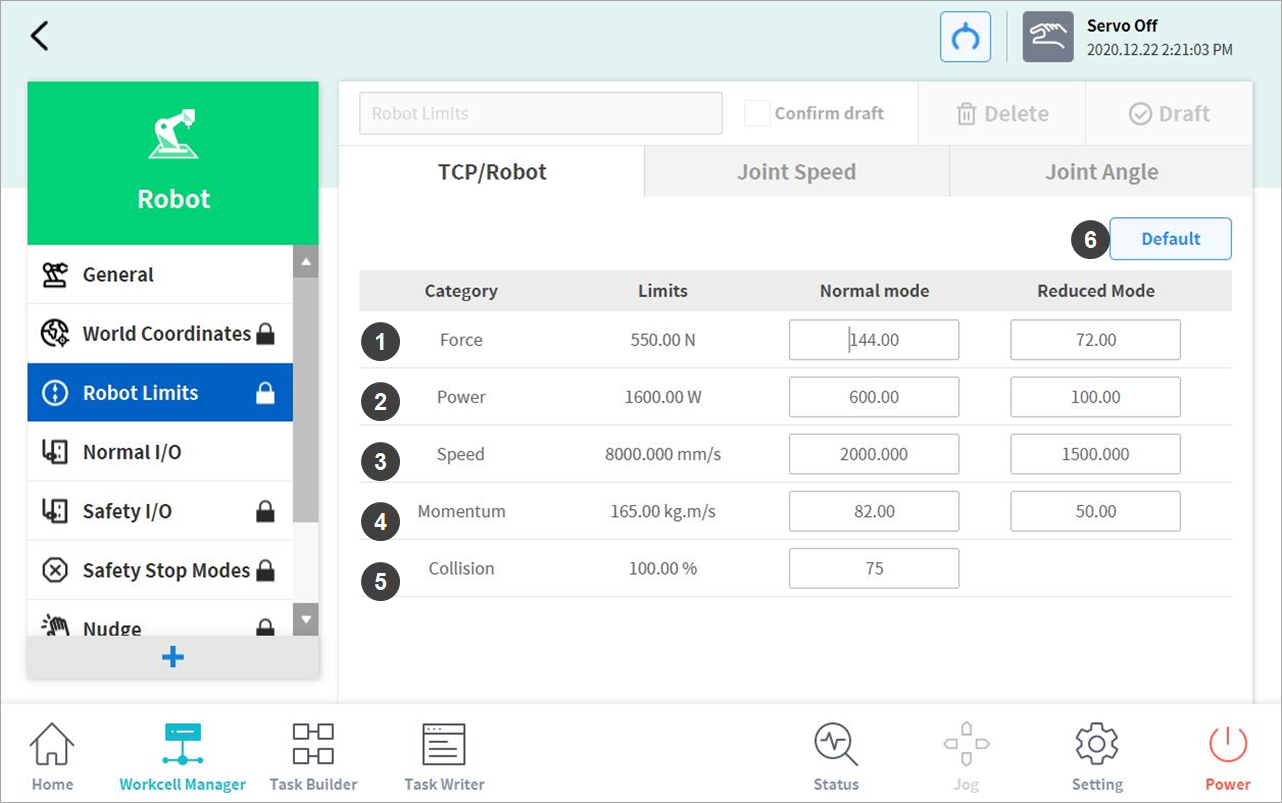
N° | Élément | Description |
1 | Force (N) | Limite le niveau de force appliqué au niveau du point central de l'outil (TCP). |
2 | Power (W) | Limite le niveau de puissance mécanique du robot. |
3 | Speed (mm/s) | Limite la vitesse du point central de l'outil (TCP). |
4 | Momentum (kg.m/s) | Limite la taille de l'impulsion du robot. |
5 | Collision (%) | Configure la sensibilité de la détection de collision. |
6 | Default Value | Réinitialise la configuration des limites de vitesse des articulations aux valeurs par défaut. |
Ÿ Joint Speed Limits (Limites de vitesse des articulations)
Pour définir les limites de vitesse des articulations, accédez à la cellule de travail Robot et sélectionnez Robot > Robot Limits (Limites du Robot) > Joint Speed (Vitesse d'articulation). L'écran de configuration Joint Angle Limits (Limites de vitesse des articulations) est composé des éléments suivants :
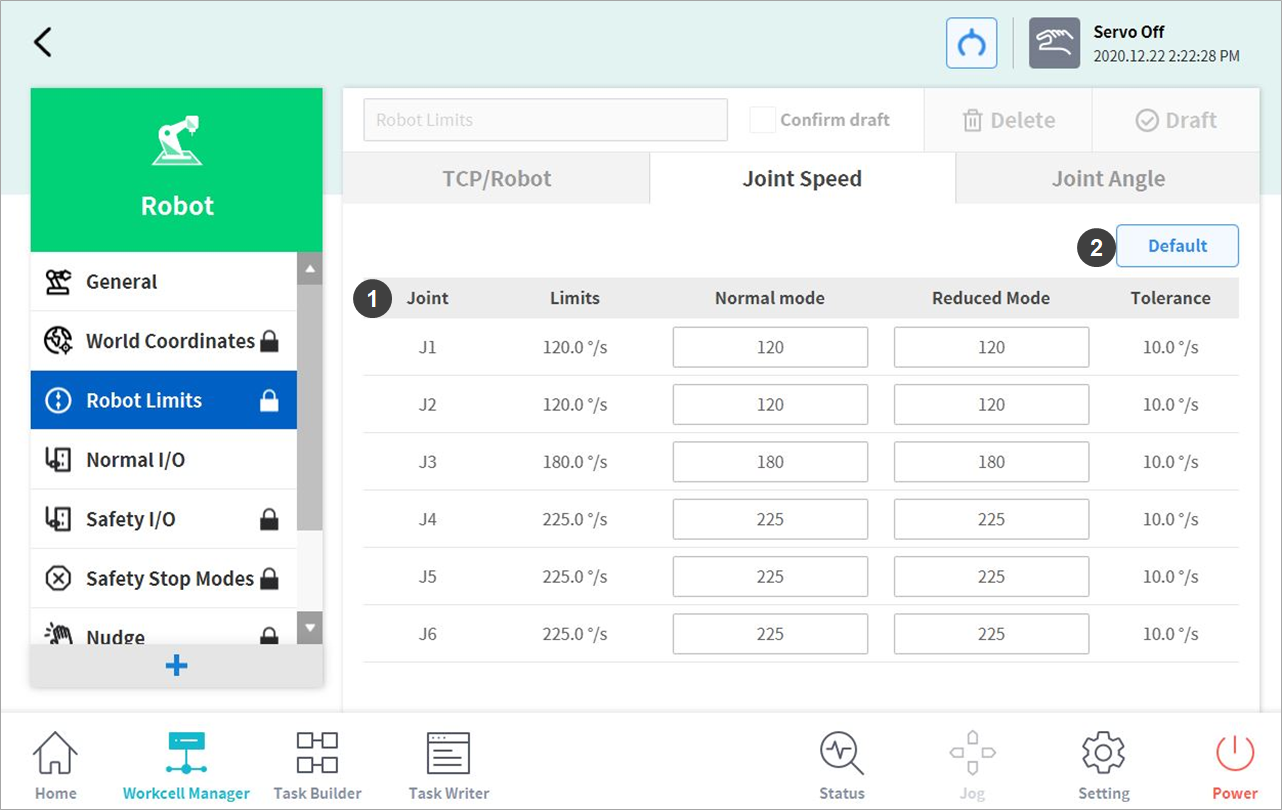
N° | Élément | Description |
1 | Joint Speed | Limite la vitesse de chaque articulation. |
2 | Default Value | Réinitialise la configuration des limites de vitesse des articulations aux valeurs par défaut. |
Ÿ Joint Angle Limits (Limites des angles des articulations)
Pour définir les limites des angles des articulations, accédez à la cellule de travail Robot et sélectionnez Robot > Robot Limits (Limites du Robot) > Joint Angle (Angle de l'articulation). L'écran de configuration Joint Angle Limits (Limites des angles des articulations) est composé des éléments suivants :
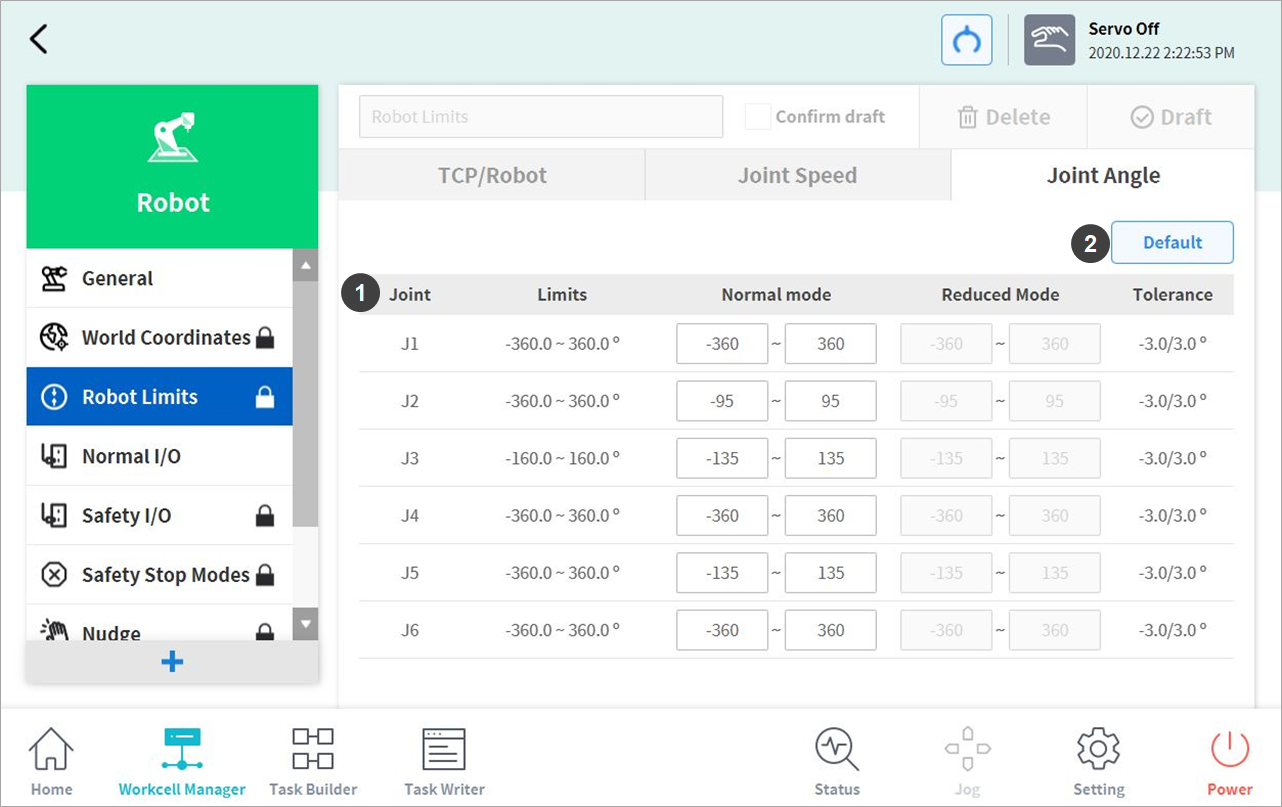
N° | Élément | Description |
1 | Angle Range of each Joint | Limite la plage d'angle de chaque articulation. |
2 | Default Value | Réinitialise la configuration des limites des angles des articulations aux valeurs par défaut. |