
Configuration de Nudge (Pousser)
Si le robot est arrêté par le Safety Stop Mode (mode d'arrêt de sécurité) SS2 ou RS1 dans une zone collaborative, l'état Interrupted (Interrompu) peut être réinitialisé et la tâche peut reprendre grâce à une entrée Nudge (Pousser). L'option Nudge (Pousser) peut être activée sur des sections définies par l'utilisateur.
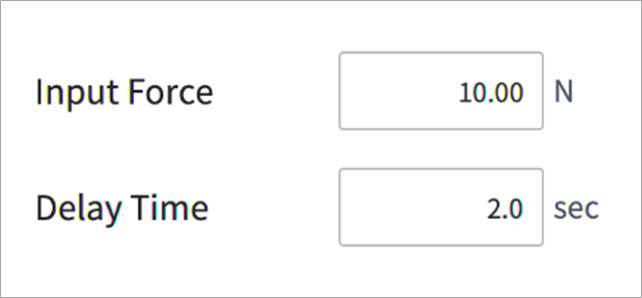
Pour définir Nudge (Pousser), sélectionnez l'élément Nudge dans la cellule de travail Robot. Avec une entrée de poussée, la force à reconnaître (force de poussée) et le temps d'attente de la reconnaissance de poussée à la reprise du travail (temps de retard) peuvent également être saisis.
La plage configurable de la force d'entrée pour Nudge (Pousser) est comprise en 10,00 et 50,00 N
Avertissement
- La fonction Nudge (Pousser) doit uniquement être utilisée si elle est approuvée via une évaluation des risques rigoureuse.