Configuration de la zone collaborative
Pour définir la zone collaborative, appuyez sur le bouton Ajouter 
- Saisissez le nom de la cellule de travail dans le champ prévu à cet effet en haut de l'écran de paramètre de cellule de travail.
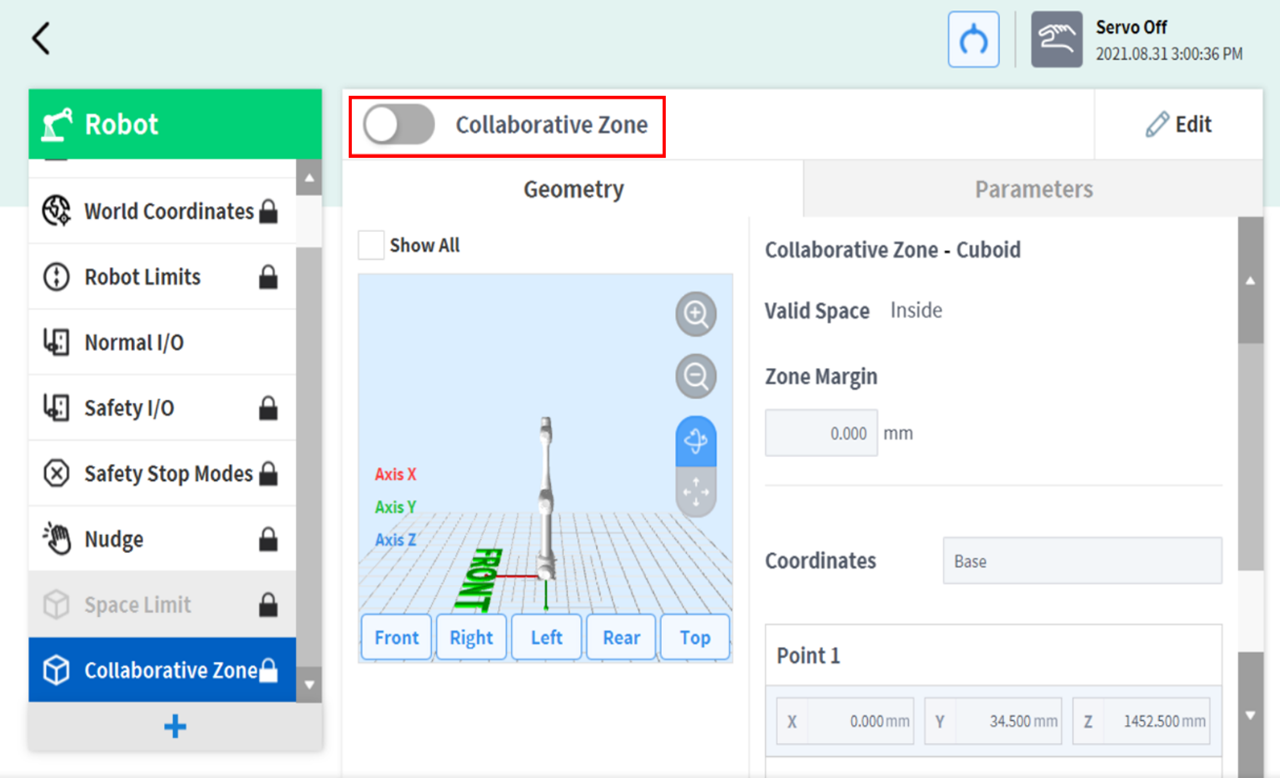
- Définissez les informations de position selon la forme de la zone ainsi que le Valid space (Espace valide) et la Zone margin (Marge de zone) dans l'onglet Geometry (Géométrie).
- Définissez les paramètres TCP/Robot Limits (Limites du TCP/Robot), Safety Stop Modes (Modes d'arrêt de sécurité) et Dynamic Zone Enable (Activation de la zone dynamique) dans l'onglet Parameters (Paramètres), et appuyez sur Draft (Ébauche).
- Vérifiez que tous les paramètres affichés sont conformes aux besoins puis cochez la case Confirm draft (Confirmer ébauche) et appuyez sur Confirm (Confirmer).
- Appuyez sur le bouton à bascule d'activation pour appliquer la Zone collaborative.