
Noms et fonctions
Manipulator
Noms des pièces
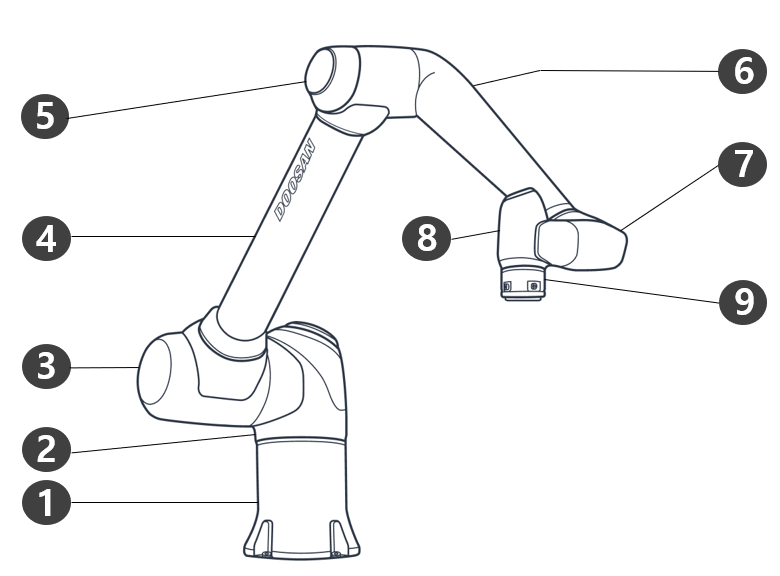
N° | Pièce | N° | Pièce |
|---|---|---|---|
1 | Base | 6 | Link2 |
2 | J1 | 7 | J5 |
3 | J2 | 8 | J6 |
4 | Link1 | 9 | Tool flange |
5 | J3 | 10 |
Fonctions clés
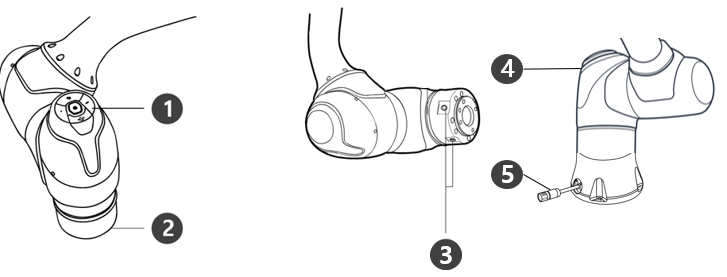
N° | Élément | Description |
|---|---|---|
1 | Cockpit | [Option] Contrôleur utilisé pour l'apprentissage direct. |
| 2 | Tool flange | Zone où installer les outils. |
3 | Flange I/O | Port E/S pour la commande d'outils. |
4 | LED | Affiche l'état du robot selon différentes couleurs. Pour plus d'informations à propos de l'état du robot, référez-vous à État et couleur de la LED de la bride pour chaque mode . |
5 | Connector | Utilisé pour l'alimentation et la communication avec le robot. |
Contrôleur
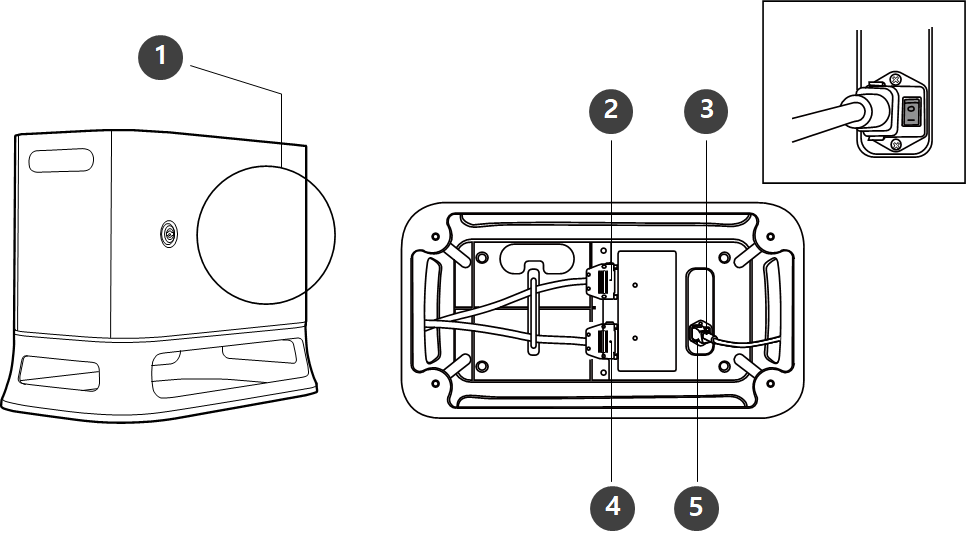
N° | Élément | Description |
|---|---|---|
1 | Borne de connexion E / S (interne) | Utilisé pour connecter le contrôleur ou les périphériques. |
2 | Boîtier d'apprentissage borne de connexion de câble | Utilisé pour allumer/éteindre l'alimentation principale du boîtier de contrôle. |
3 | interrupteur | Utilisé pour connecter le câble du boîtier d'apprentissage au contrôleur. |
4 | Borne de connexion du câble du manipulateur | Utilisé pour connecter le câble du manipulateur au contrôleur. |
5 | Borne de connexion d'alimentation | Utilisé pour connecter l'alimentation du contrôleur. |
Remarque
- Si vous sélectionnez un contrôleur optionnel, vérifiez les instructions dans l'annexe pour connecter les câbles