
Configuration de Tool Center Point (point central de l'outil ) (TCP)
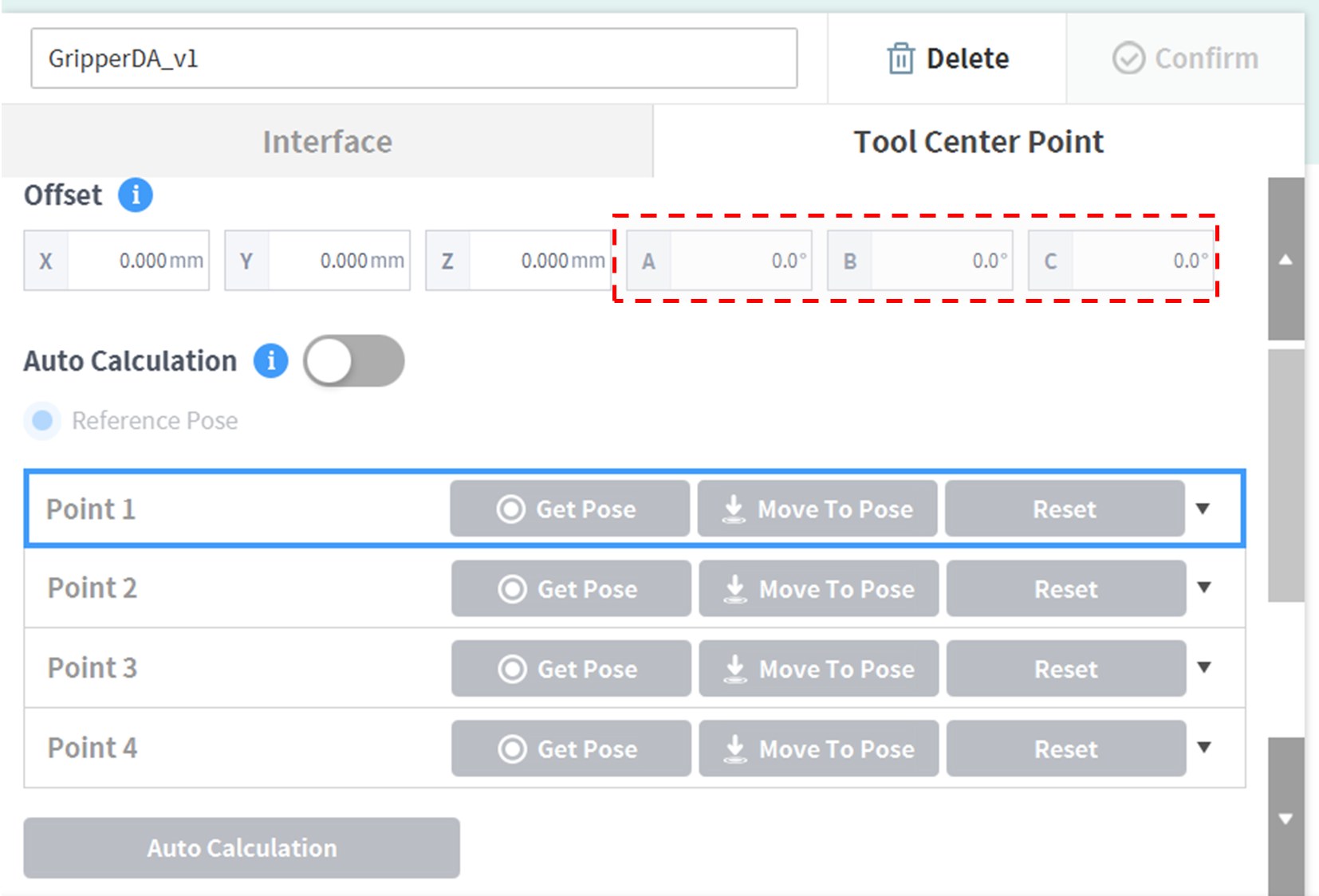
La définition de l'axe des coordonnées exprimé par « x, y, z » et de l'axe des coordonnées exprimé par « X, Y, Z » est la suivante :
- Axe des « coordonnées de la bride » (x, y, z) : la direction de l'axe des coordonnées définie à l'extrémité de la bride est identique aux coordonnées du robot avec un angle de l'articulation du robot égal à (0,0,0,0,0,0).
- Axe des « coordonnées du TCP » (X,Y,Z) : l'axe de coordonnées est défini à l'extrémité de l'outil installé sur l'extrémité de la bride ou du point de travail. L'angle de rotation des « coordonnées du TCP » est défini en fonction des « coordonnées de la bride » dans l'ordre des rotations 1) à 3) suivantes :
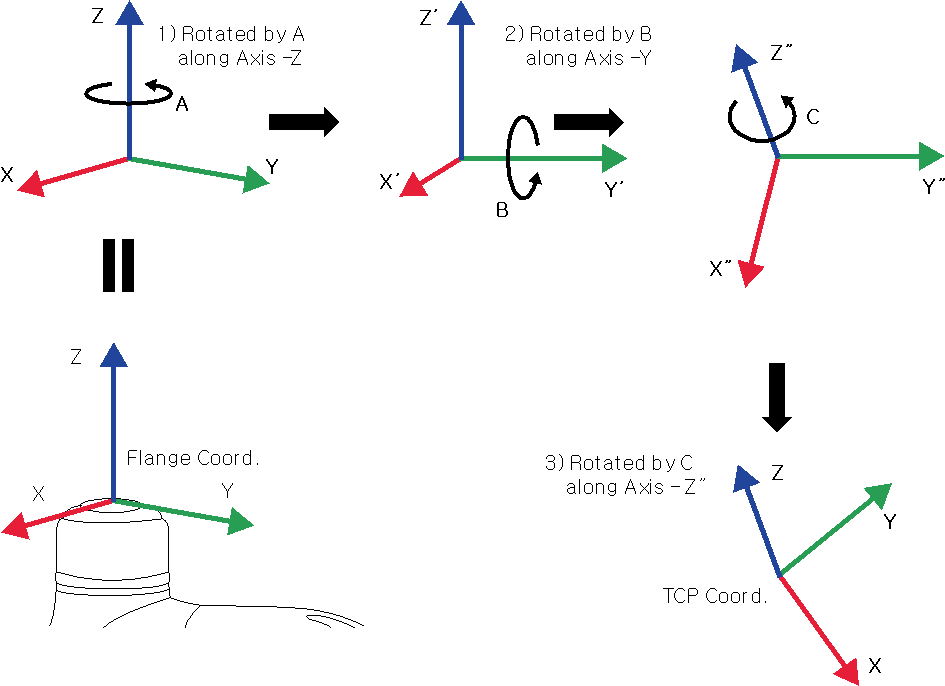
1) Rotation de A degrés sur l'axe z des coordonnées de la bride
2) Rotation de B degrés sur l'axe y' des coordonnées en fonction de la rotation 1)
3) Rotation de C degrés sur l'axe z' des coordonnées en fonction de la rotation 2)
Voici quelques exemples de configuration du TCP selon la méthode décrite ci-dessus :
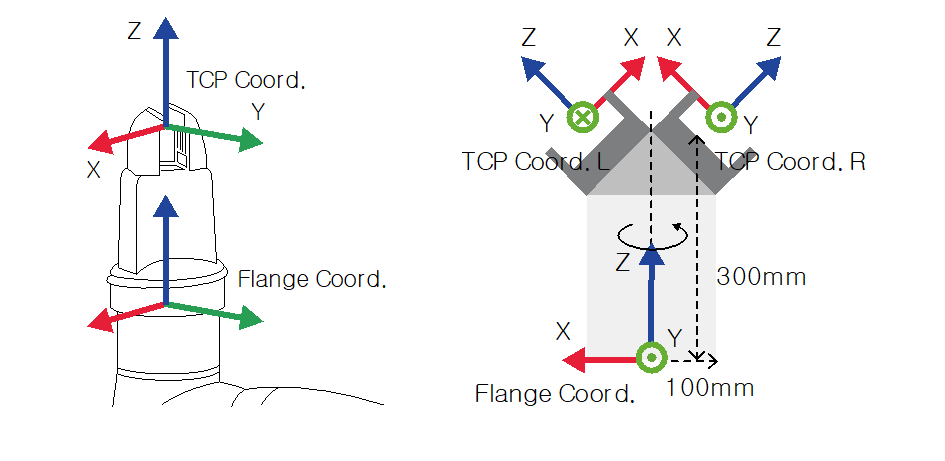
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0] : pince de préhension générale avec décalage de la direction Z (coord. TCP)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0] : pince gauche à un angle de 45 degrés (coord. TCP gauche)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0] : pince droite à un angle de 45 degrés (coord. TCP droite)