Le robot est dans sa position d'emballage pour faciliter le transport ou l'emballage. Pour utiliser le robot, il est nécessaire de dégager la posture de l'emballage. Étant donné que le robot maintient une pose qui dépasse la limite d'angle de joint lorsqu'il est en position de conditionnement, il est impossible de définir l'état Servo on en raison d'une violation de la limite de sécurité. La LED du robot est allumée en rouge dans cet état.
Remarque
S'il existe un cas dans lequel vous devez emballer le robot en raison d'un déplacement, définissez la pose de l'emballage en utilisant déplacer avec la pose de l'emballage en mode d'emballage.
Le processus de libération de la pose d'emballage est le suivant :
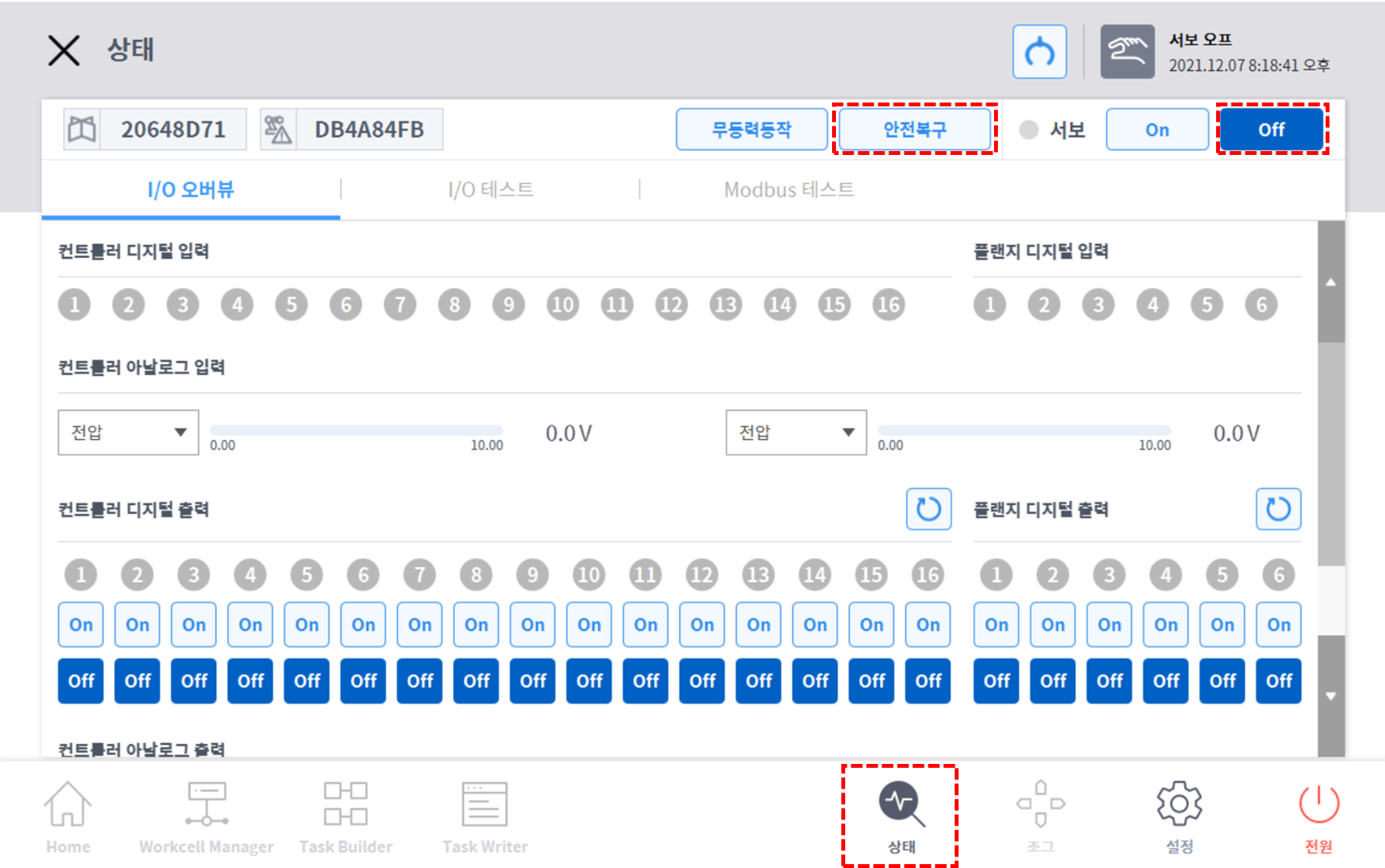
Appuyez sur STATUS sur l'écran initial de la poignée de commande d'apprentissage.
Appuyez sur le bouton récupération de sécurité . Le bouton de récupération de sécurité est activé lorsque le mode Servo Off est activé.
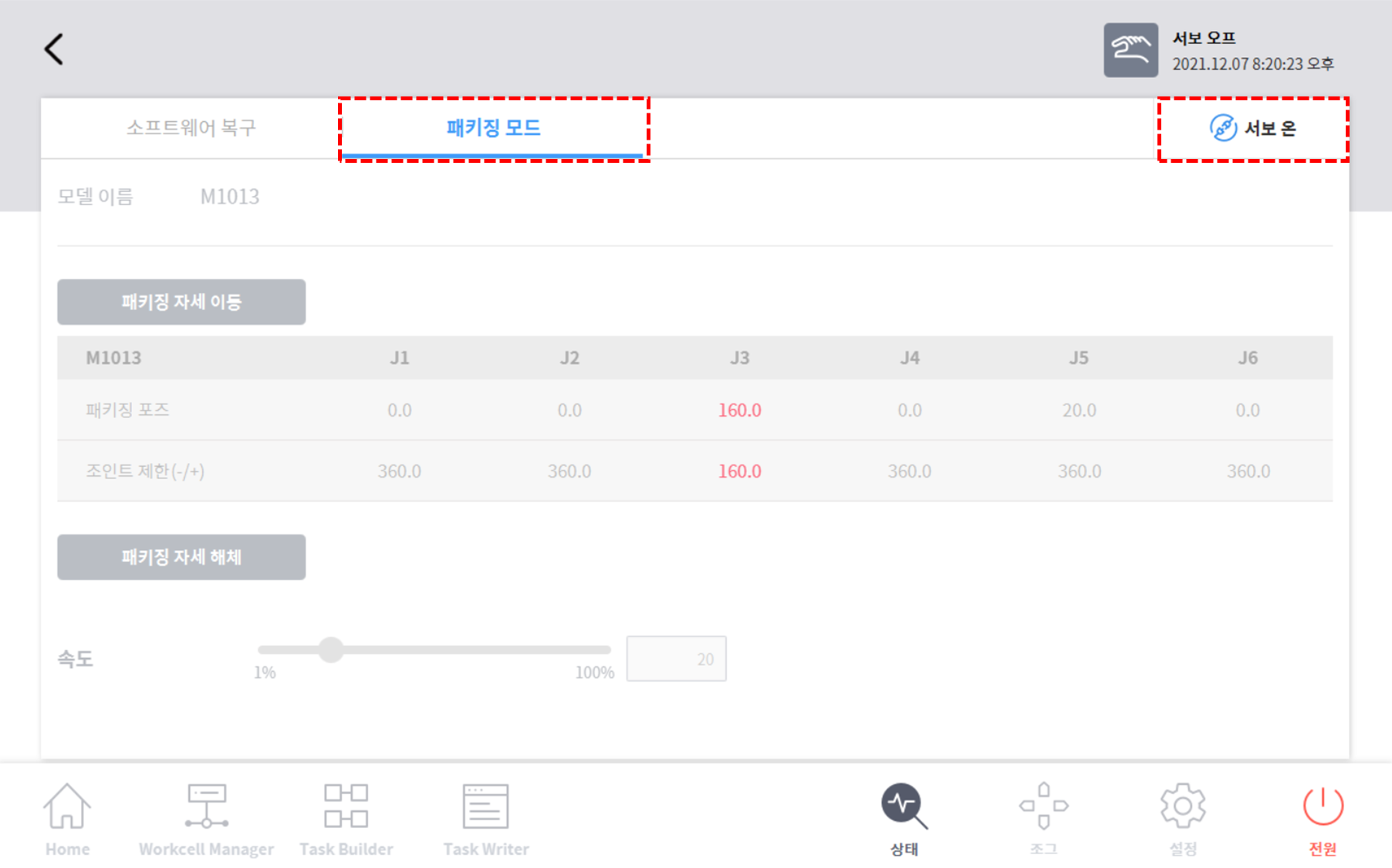
Sélectionnez l'onglet mode de conditionnement .
Appuyez sur le bouton Servo On .
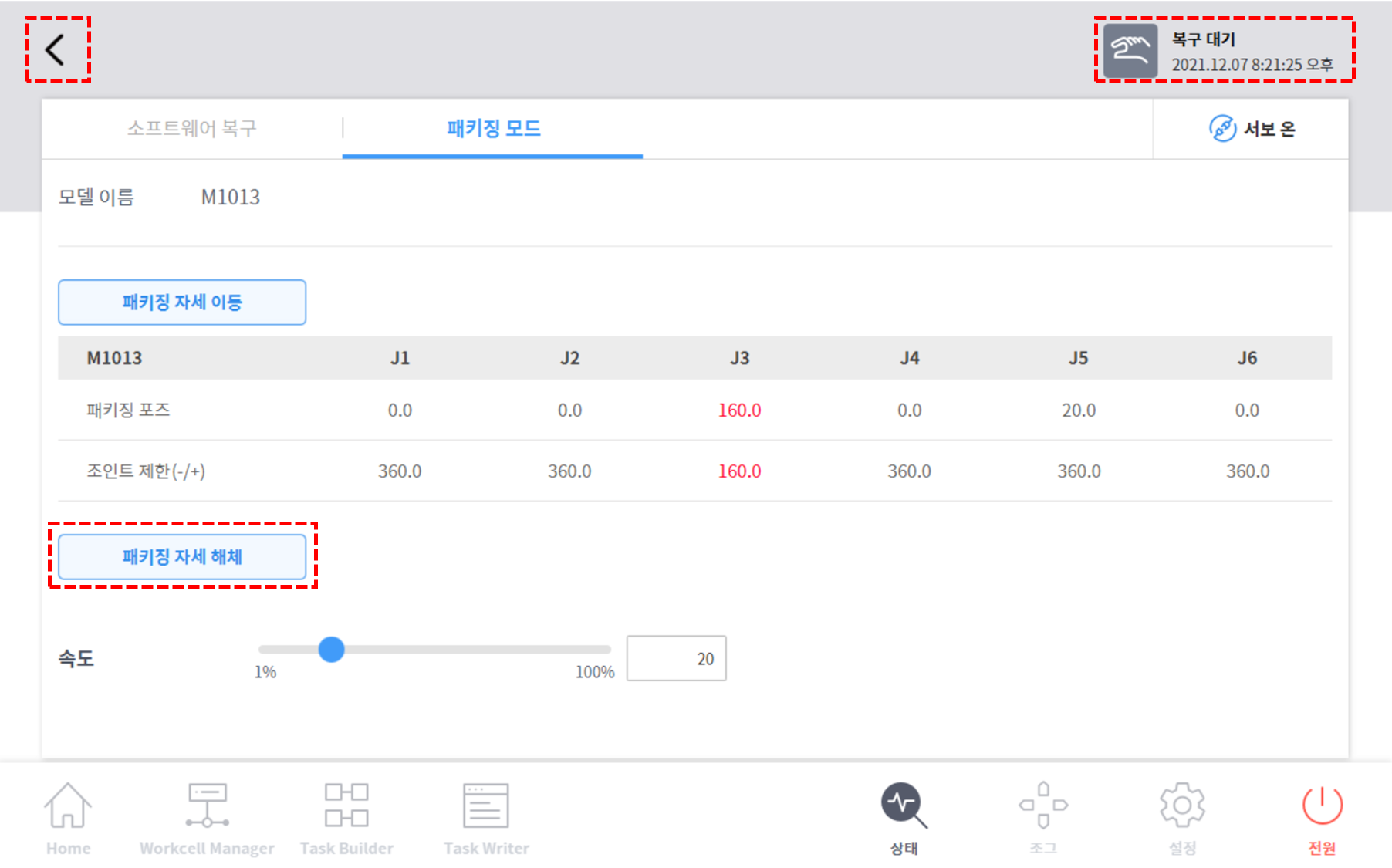
L'affichage de l'état du robot en bas à droite de l'écran de la poignée de commande d'apprentissage passe de sécurité désactivée à Veille de récupération. Appuyez sur le bouton bascule mode emballage de l' onglet mode emballage .
Appuyez sur le bouton de désengagement de l'emballage et maintenez-le enfoncé . Le mode d'emballage du robot est désengagé et le robot se déplace en position initiale. Lorsque le robot est en position initiale, il ne se déplace plus.
Une fois que le robot est en position initiale, appuyez sur le bouton en haut à gauche de l'écran.
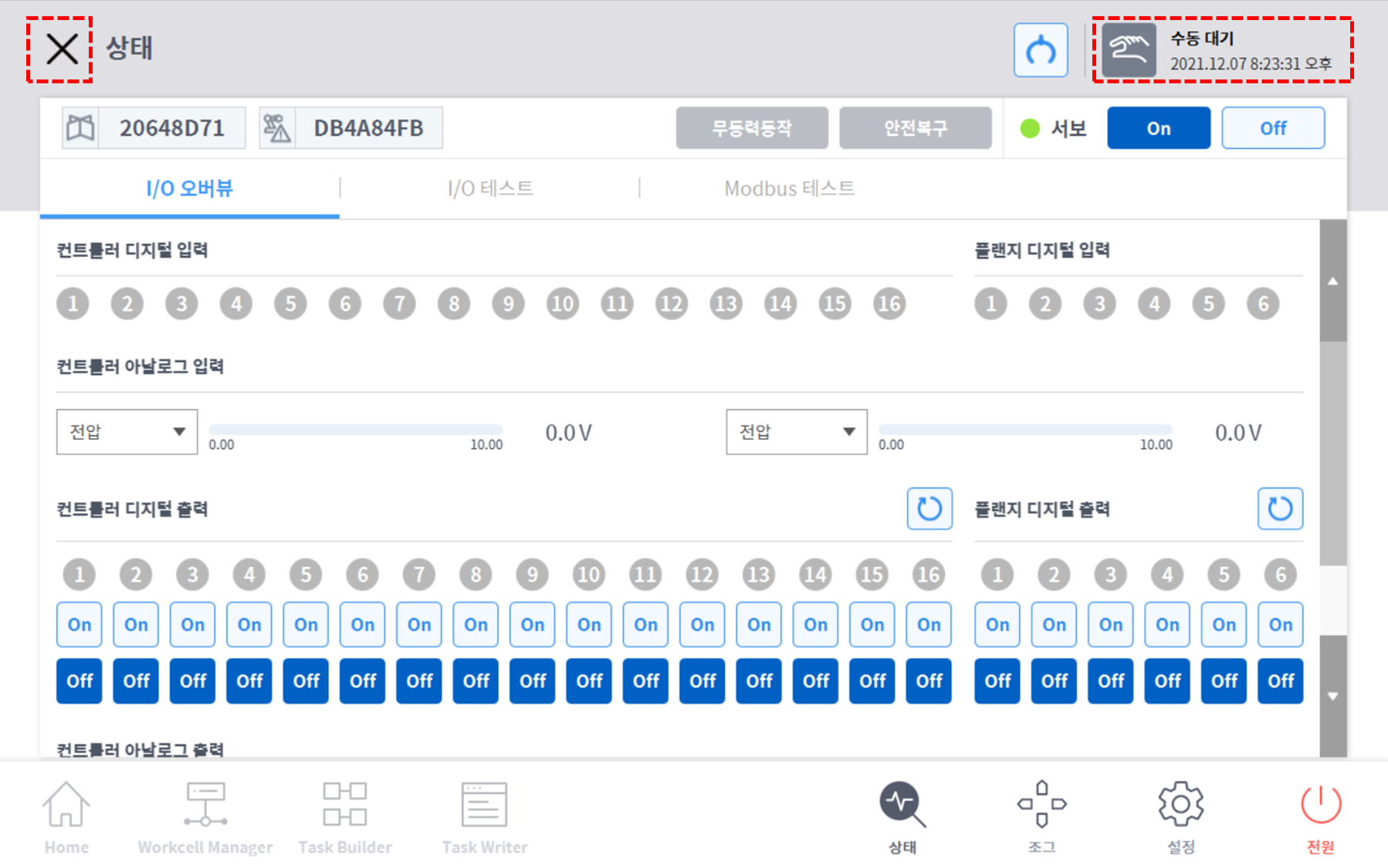
L'affichage de l'état du robot en bas à droite de la poignée de commande d'apprentissage passe de Veille de récupération à Veille manuelle. Le robot est maintenant dans un état où l'utilisateur peut l'utiliser. Appuyez sur le bouton Fermer de l' écran État pour fermer la fenêtre d'état.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.