
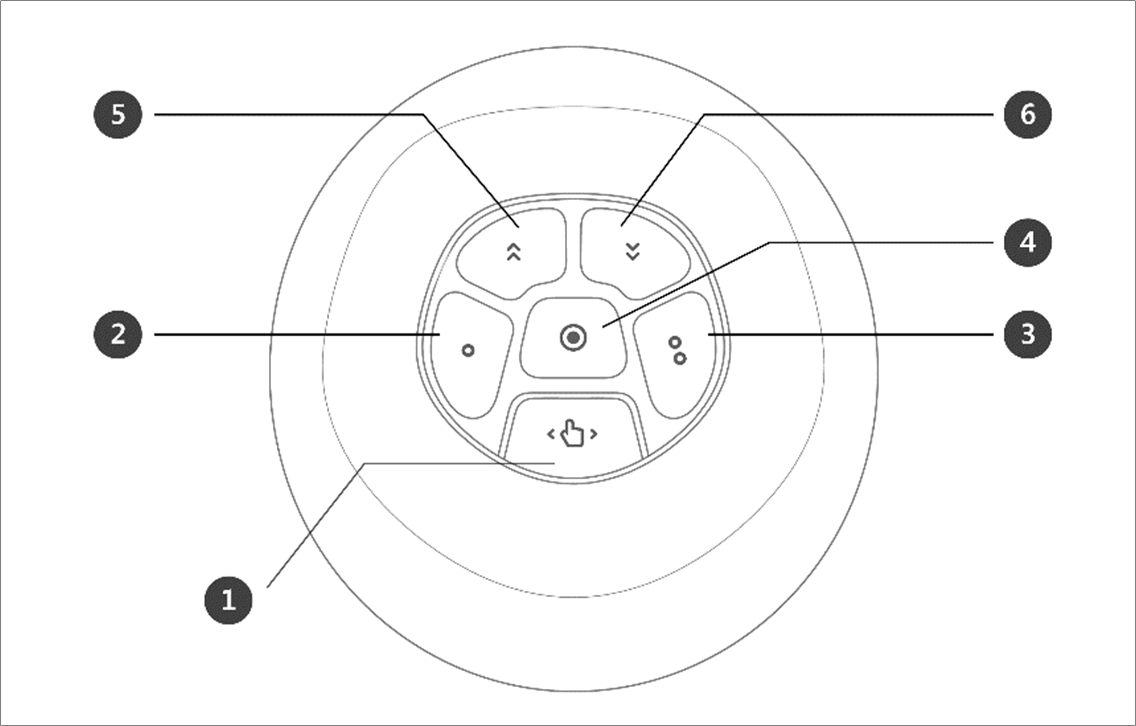
Bouton du cockpit (six boutons)
No. | Élément | Description |
|---|---|---|
1 | Hand-Guiding Button | Ce bouton permet d'ajuster ou de modifier la position du robot. |
2,3 | Bouton de réglage utilisateur | Ce bouton permet de modifier la position du robot en saisissant une position conformément à une condition de verrouillage correspondant à un mode.
 Pour plus d'informations à propos des paramètres, référez-vous à « Configuration du cockpit» |
4 | Save Pose Button | Enregistre la position actuelle du robot. Pour plus d'informations, référez-vous à « Configuration du point de travail de commande de compétence avec les boutons du cockpit. » |
5 | One Line Up | Déplace la mise au point affichée à l'écran d'une ligne vers le haut |
6 | One Line Down | Déplace la mise au point affichée à l'écran d'une ligne vers le bas |
Remarque – Modification des réglages du cockpit
Les paramètres du
 bouton de guidage de la main et
bouton de guidage de la main et  ,
,  du bouton de mouvement des contraintes nécessitent 2 secondes pour être modifiés.
du bouton de mouvement des contraintes nécessitent 2 secondes pour être modifiés.L'appui sur le bouton Save Pose (Enregistrer la position) dans l'écran Skill Setting (Configuration des compétences) déplacera automatiquement la mise au point vers la position suivante.
Le bouton Cancel (Annuler) peut uniquement être utilisé dans la fenêtre Skill Setting (Configuration des compétences) qui gère les positions multiples.