Présentation du produit (CS-06)
Noms et fonctions
Contrôleur c.c. (CS-06)
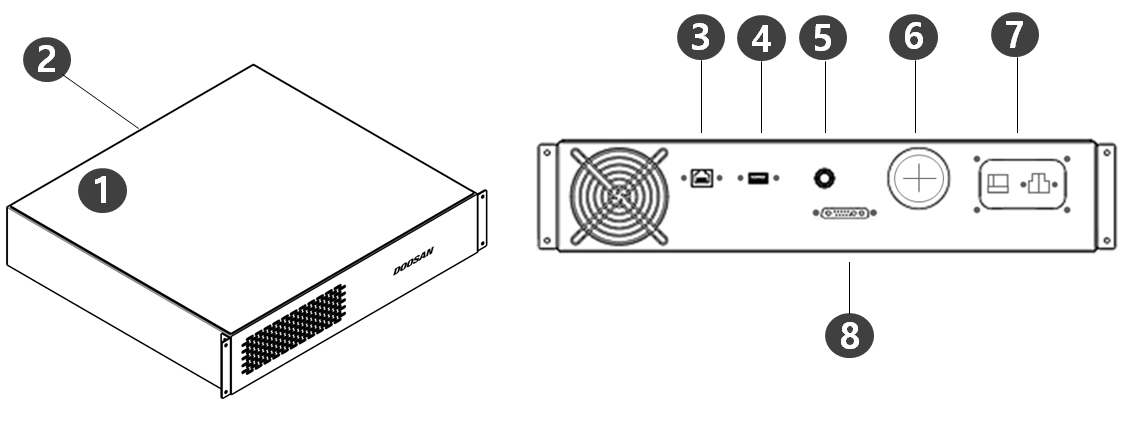
N° | Élément | Description |
1 | I/O connection terminal (internal) | La connexion aux contrôleurs ou aux autres robots ou équipements environnants n'est pas possible. |
2 | Emergency stop button and Smart Pendant connection terminal | Connecte le câble du bouton d'arrêt d'urgence ou du boîtier intelligent au contrôleur. |
3 | Network connection terminal | Les ordinateurs portables, les équipements TCP/IP et Modbus ainsi que les capteurs de vision peuvent être connectés à la borne de connexion réseau située à l'intérieur du contrôleur. |
4 | USB connection terminal | Les journaux générés pendant le fonctionnement du robot peuvent être enregistrés sur un périphérique de stockage USB, ou les tâches peuvent être exportées ou importées. |
5 | Emergency stop button and Smart Pendant connection terminal | Connecte le câble du bouton d'arrêt d'urgence ou du boîtier intelligent au contrôleur. |
6 | External cable terminal | Borne pouvant connecter des appareils externes. |
7 | Power connection terminal | Connecte l'alimentation au contrôleur. |
| 8 | Manipulator cable connection terminal | Connecte le câble du manipulateur au contrôleur. |
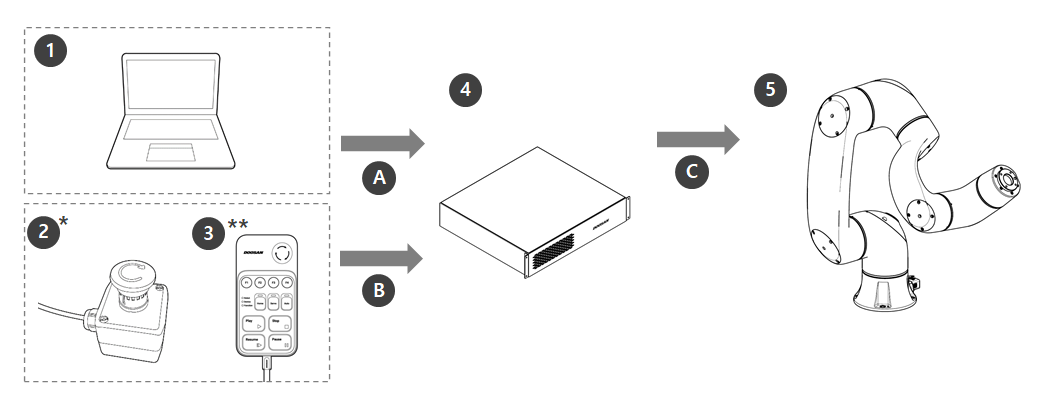
Configuration du système
| N° | Élément | Description |
|---|---|---|
| 1 | Ordinateur portable | Après l'installation de la DART Platform, un environnement de travail identique au boîtier d'apprentissage peut être configuré L'ordinateur portable n'est pas inclus dans l'emballage. Un tel ordinateur est nécessaire lors de l'installation de la DART Platform. |
| 2 | Bouton d'arrêt d'urgence* | lorsqu'un ordinateur portable est intégré au système, il est utilisé comme bouton d'arrêt d'urgence du boîtier d'apprentissage |
| 3 | Boîtier intelligent** | le robot peut être facilement contrôlé à l'aide d'un boîtier capable d'effectuer des fonctions simples telles que mettre le servo hors tension/sous tension ou exécuter/fermer les programmes prédéfinis. |
| 4 | Contrôleur* | règle le mouvement du robot en fonction de la position ou du mouvement défini par le boîtier d'apprentissage. Il dispose de plusieurs ports d'E/S permettant de connecter et d'utiliser différents types d'équipements et d'appareils. |
| 5 | Manipulator* | il s'agit d'un robot industriel collaboratif pouvant réaliser des tâches de transport et d'assemblage à l'aide de divers outils. |
| A | Command/ Monitoring | |
| B | Command | |
| C | Power Supply/ Network |
- Les éléments sont indiqués comme éléments standard (*) et éléments optionnels (**, vendus séparément)
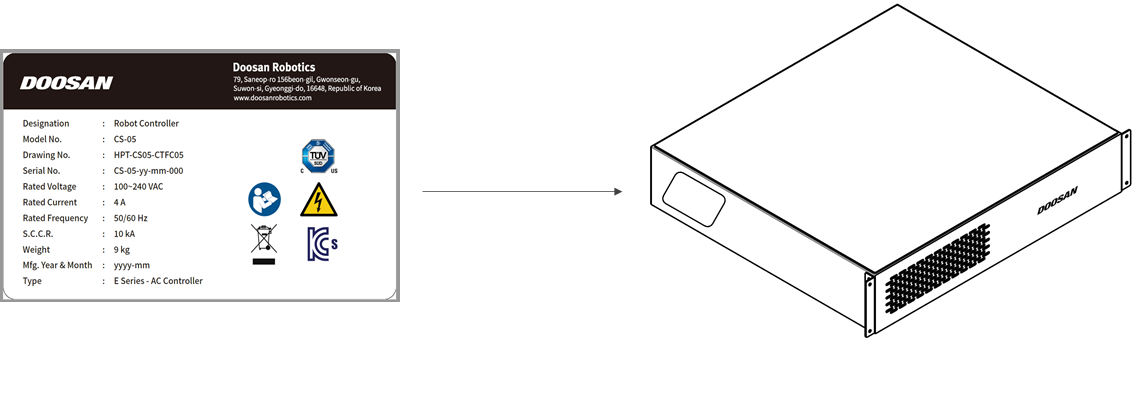
Puissance nominale et étiquettes