
Noms et fonctions
Manipulator
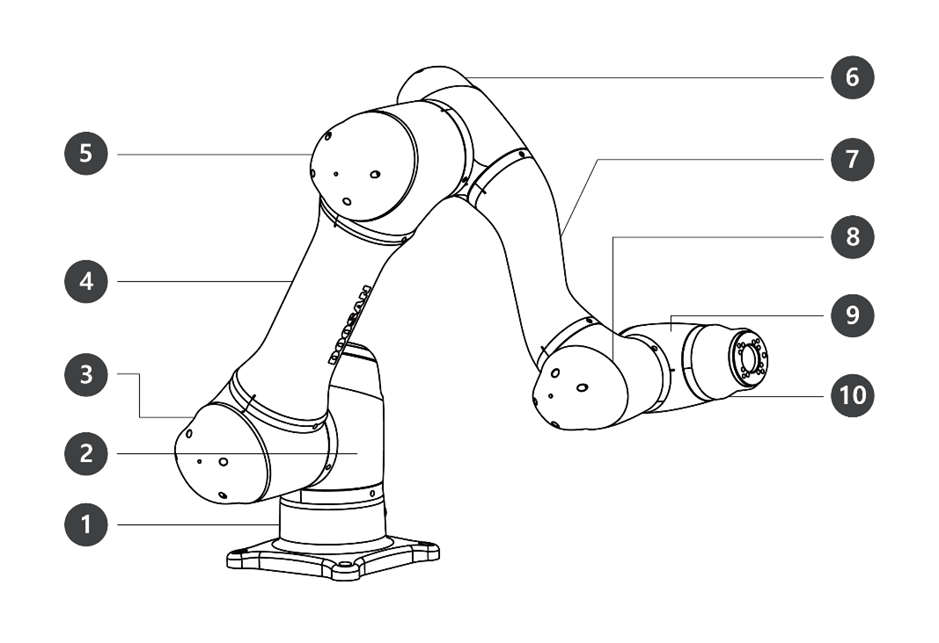
Noms des pièces
N° | Pièce | N° | Pièce |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | Tool flange |
4 | Link1 | 9 | J5 |
5 | J3 | 10 | J6 |
Fonctions clés
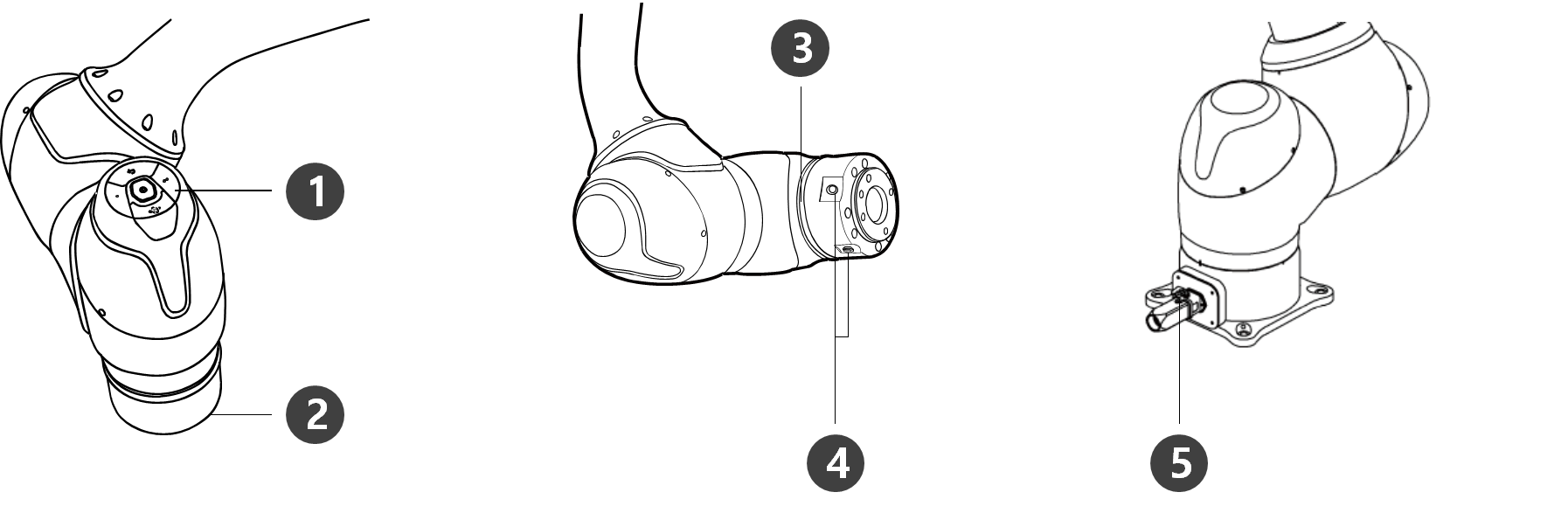
N° | Élément | Description |
|---|---|---|
1 | Cockpit | [Option] Contrôleur utilisé pour l'apprentissage direct. |
| 2 | Flange I/O | Port E/S pour la commande d'outils. (entrée numérique 2 canaux, sortie 2 canaux) |
3 | Tool flange | Zone où installer les outils. |
4 | LED (1-axis) | Affiche l'état du robot selon différentes couleurs. Pour plus d'informations à propos de l'état du robot, référez-vous à « (2.12-fr_FR) État et couleur de la LED de la bride pour chaque mode». |
5 | Connector | Utilisé pour l'alimentation et la communication avec le robot. |
Contrôleur
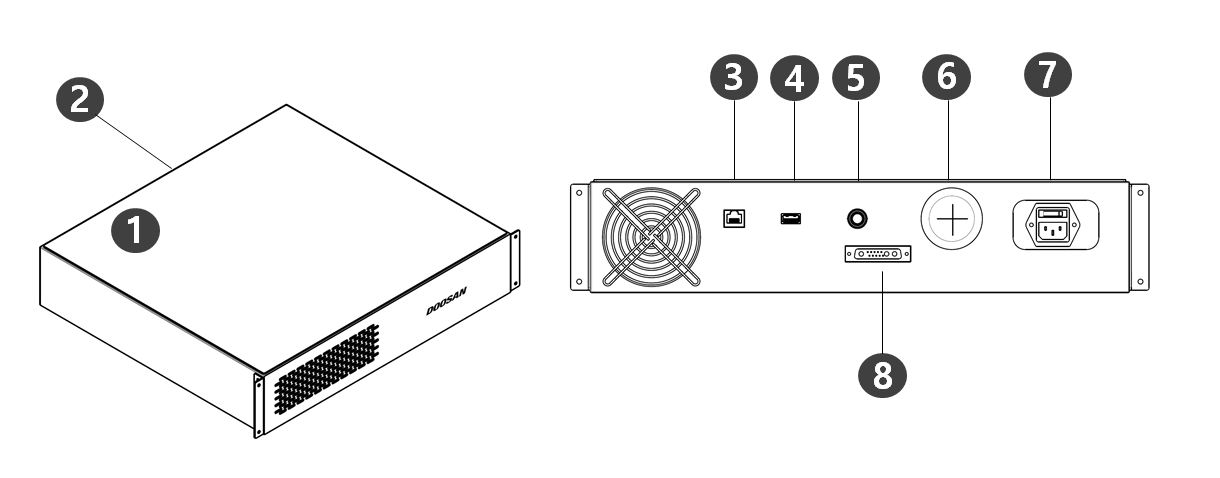
N° | Élément | Description |
1 | I/O connection terminal (internal) | La connexion aux contrôleurs ou aux autres robots ou équipements environnants n'est pas possible. |
2 | Emergency stop button and Smart Pendant connection terminal | Connecte le câble du bouton d'arrêt d'urgence ou du boîtier intelligent au contrôleur. |
3 | Network connection terminal | Les ordinateurs portables, les équipements TCP/IP et Modbus ainsi que les capteurs de vision peuvent être connectés à la borne de connexion réseau située à l'intérieur du contrôleur. |
4 | USB connection terminal | Les journaux générés pendant le fonctionnement du robot peuvent être enregistrés sur un périphérique de stockage USB, ou les tâches peuvent être exportées ou importées. |
5 | Emergency stop button and Smart Pendant connection terminal | Connecte le câble du bouton d'arrêt d'urgence ou du boîtier intelligent au contrôleur. |
6 | External cable terminal | Borne pouvant connecter des appareils externes. |
7 | Power connection terminal | Connecte l'alimentation au contrôleur. |
| 8 | Manipulator cable connection terminal | Connecte le câble du manipulateur au contrôleur. |
Bouton d'arrêt d'urgence
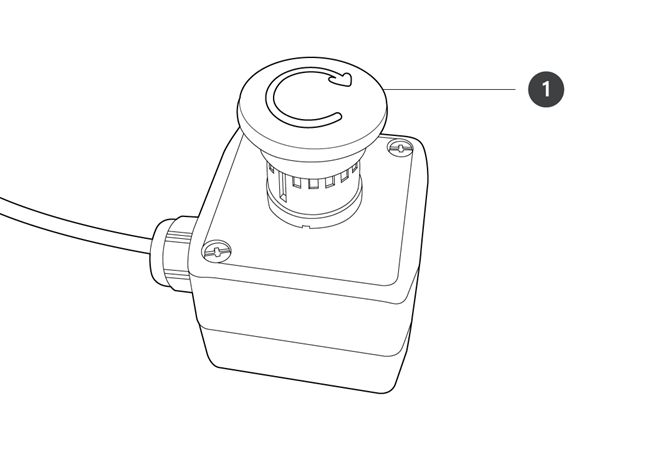
N° | Élément | Description |
|---|---|---|
1 | Bouton d'arrêt d'urgence | En cas d'urgence, appuyez sur ce bouton pour arrêter le robot. |
Boîtier intelligent
Le boîtier intelligent n'est pas un élément standard, mais un élément optionnel et doit donc être acheté séparément
Aby uzyskać szczegółowe informacje na temat produktu, zapoznaj się (2.12-fr_FR) Appendice. Boîtier intelligent (série A).
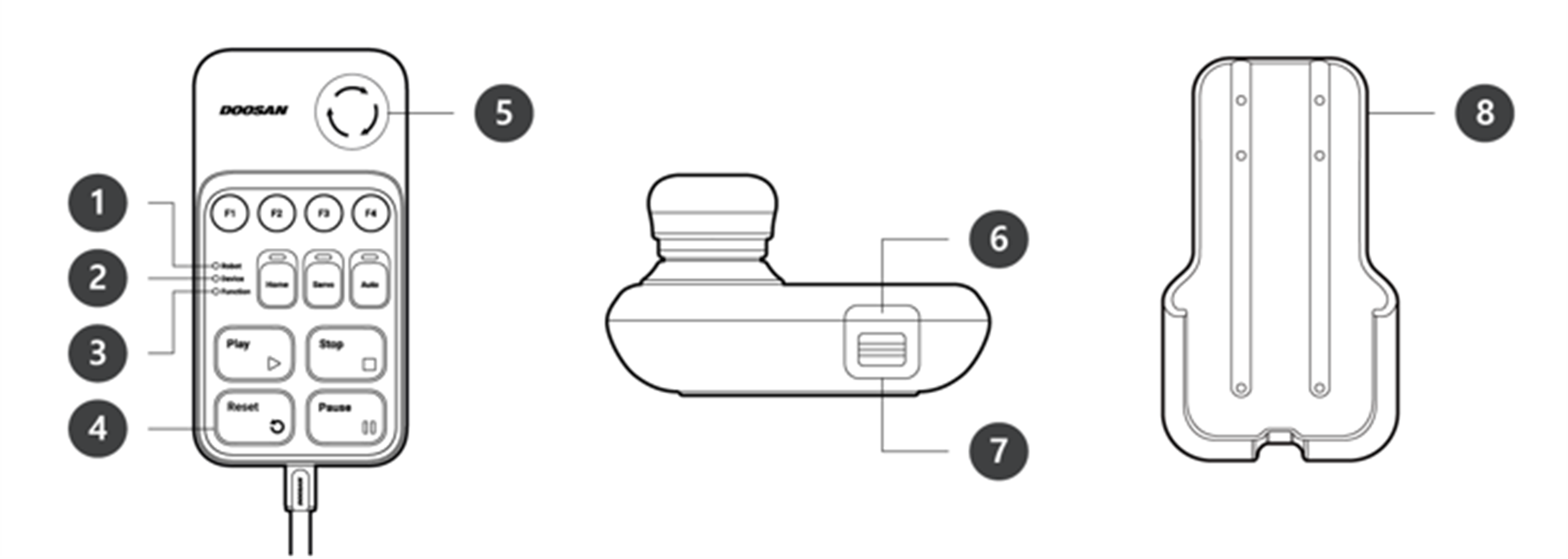
N° | Élément | Description |
|---|---|---|
1 | Robot LED | Utilisé pour indiquer l'état du robot à l'utilisateur en affichant la même couleur que la LED d'état du robot. |
2 | Device LED | Utilisé pour indiquer si le système est passé en mode boîtier intelligent. |
3 | Function LED | Une pression sur les quatre boutons de signal d'entrée (F1-F4) permet d'allumer la LED indiquant l'état de pression. |
4 | Buttons | Au total, il existe 11 boutons dont quatre boutons de signal d'entrée (F1-F4) pour chaque fonction, position d'accueil, servo, auto, lecture, arrêt, reprise et pause. |
5 | Emergency Stop Button | En cas d'urgence, appuyez sur ce bouton pour arrêter le robot. |
6 | Power Button | Utilisé pour allumer/éteindre l'alimentation principale du boîtier intelligent. |
7 | Strap Anchor | Utilisé pour ajouter une sangle au dispositif. |
8 | Holder bracket | Fixez le support de fixation sur un mur pour y accrocher le boîtier intelligent. |
Remarque
- Aby korzystać z oprogramowania SW V2.8 lub nowszego, dołącz etykietę Reset do przycisku Wznów na inteligentnym breloku.
- Jeśli używana jest wersja niższa niż SW V2.8, etykieta resetowania nie musi być dołączana. W tej wersji przycisk wznawiania w Smart Pendant działa jako funkcja wznawiania, a nie funkcja resetowania.
- Etykieta może się odkleić podczas użytkowania, dlatego należy zachować ostrożność.