
Go to Home (Accès à la position d'origine)
Déplace le robot vers la position d'origine par défaut ou la position d'origine configurée par l'utilisateur dans la section Settings dans le menu principal.
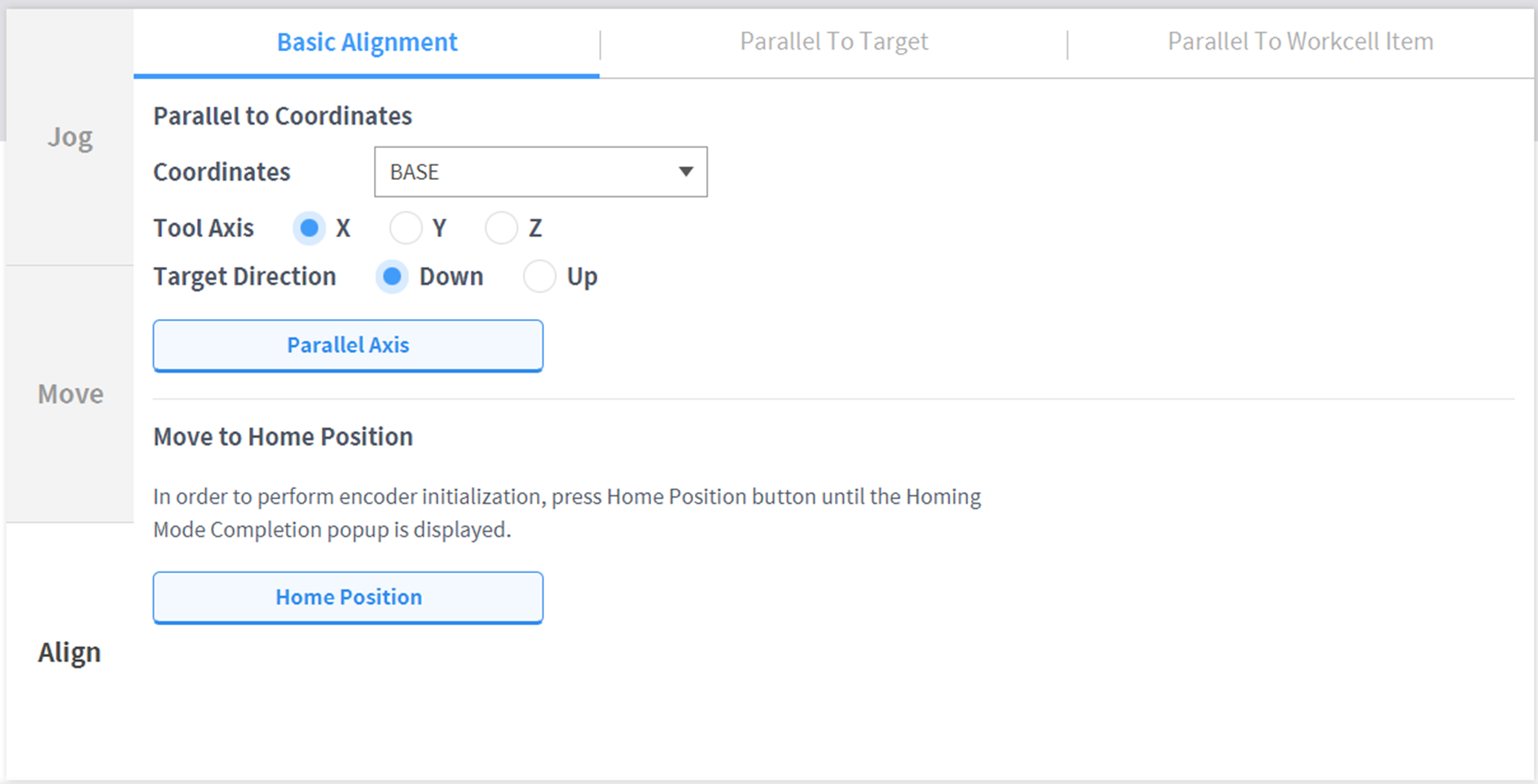
Sélectionnez l'onglet Align (Aligner) et sélectionnez l'onglet Basic Alignment (Alignement de base ).
Maintenez le bouton Home Position (Position d'origine) enfoncé pour déplacer le robot en position d'origine.
Attention
Lorsqu'un robot ou une articulation d'un robot est échangé, la position d'origine de l'utilisateur doit être réinitialisée à l'aide du pendentif d'apprentissage.
Lorsque vous effectuez une sauvegarde/restauration, vous devez réinitialiser la position d'origine de l'utilisateur sur le pendentif d'apprentissage.
Le paramètre de position d'origine de l'utilisateur de DART Studio n'est pas reflété sur le pendentif d'apprentissage. Si la position d'origine de l'utilisateur est définie à l'aide de DART Studio puis utilisée avec le pendentif d'apprentissage, la position d'origine de l'utilisateur doit être réinitialisée.