
Fonction d'intervention de l'opérateur
Si un problème survient pendant que le robot fonctionne ou qu'un utilisateur émet une commande, le robot s'arrête de fonctionner et affiche un message contextuel permettant à l'opérateur d'intervenir et de résoudre la situation. Une fois que l'utilisateur a résolu le problème, la tâche continue sur la ligne de programme où le problème s'est produit.
Remarque
Pour utiliser la fonction d'intervention de l'opérateur, vous devez effectuer l'un des réglages ci-dessous.
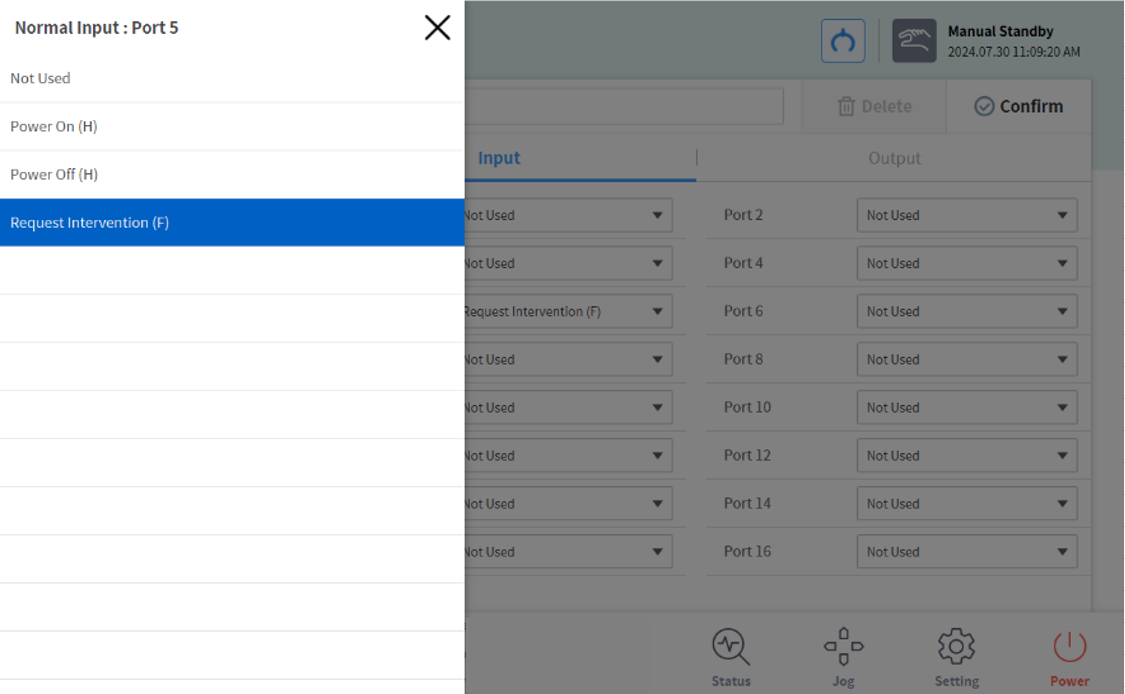
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(For detailed settings, refer to the Welding Technical Note.)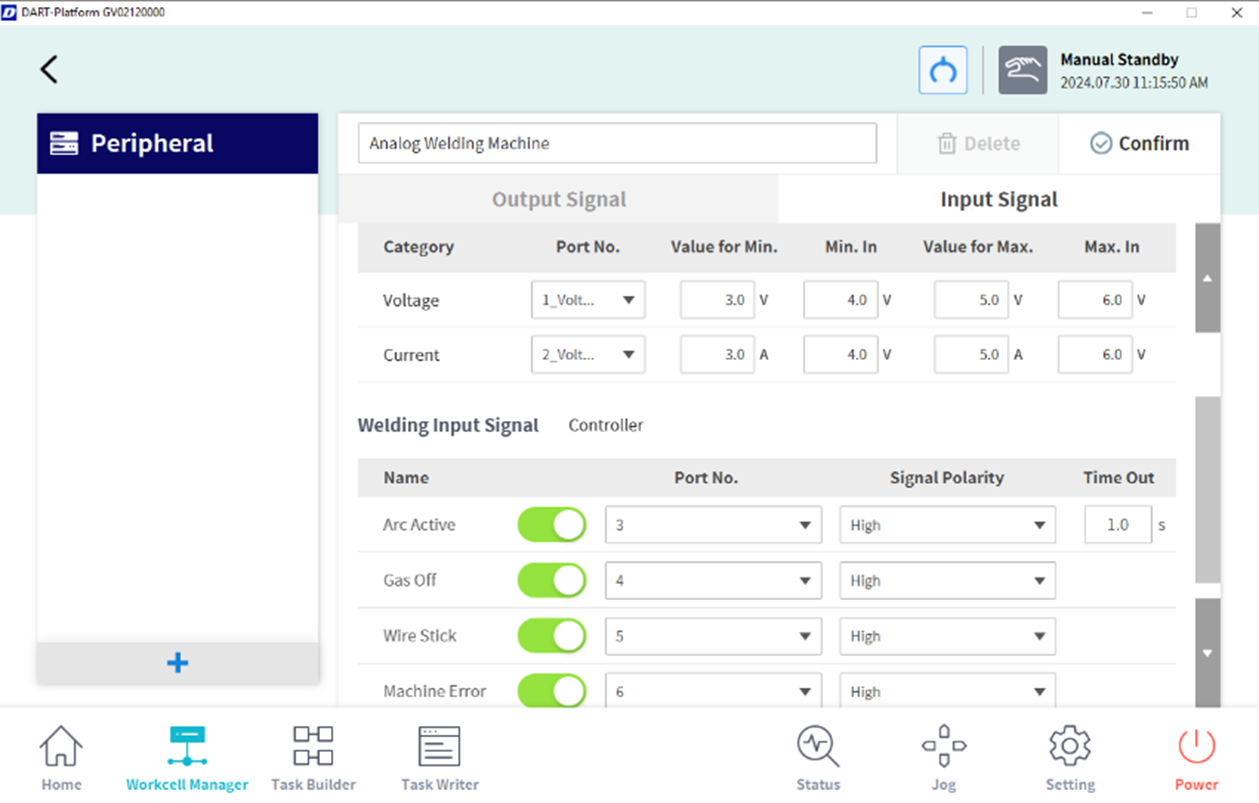
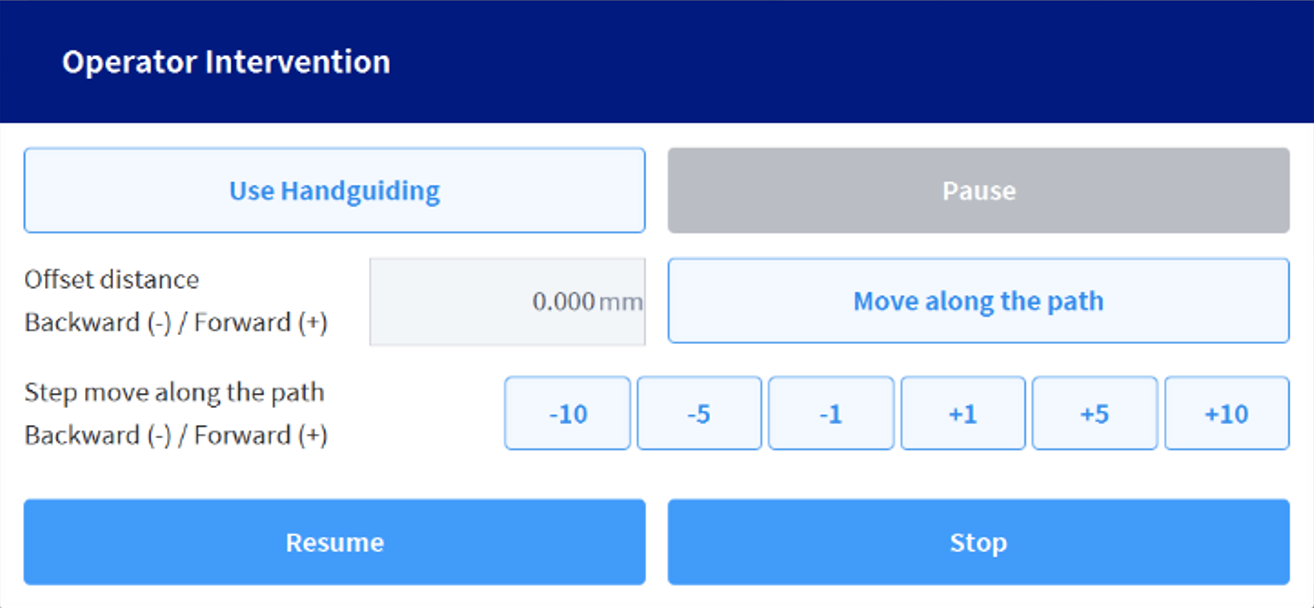
Le bouton « Déplacer le long du chemin » et le bouton « Déplacer par étape (-10,-5,-1,+1,+5,+10) » effectuent la même action. Cependant, le premier se déplace vers l'avant ou vers l'arrière à partir de la position de référence selon un décalage saisi manuellement, tandis que le second cible un point vers l'avant ou vers l'arrière selon un décalage d'étape prédéfini. Après avoir effectué une action à l'aide des boutons ci-dessus, appuyer sur un bouton supplémentaire déplacera la position actuelle selon le décalage.
Le bouton « Utiliser le guidage manuel » est activé uniquement lorsqu'une zone collaborative est définie et que l'état du robot passe à l'état Guidage manuel, ce qui permet l'apprentissage direct dans la zone. Après cela, vous pouvez activer l'apprentissage direct en appuyant sur le bouton situé à l'arrière du cockpit ou sur le pendentif d'apprentissage.
En mode Guidage manuel, le bouton « Utiliser le guidage manuel » devient le bouton « Terminer le guidage manuel ».
Lorsque vous appuyez sur le bouton « Terminer le guidage manuel », l'état de guidage manuel se termine. À ce moment-là, pour des raisons de sécurité, la position actuelle du robot, l'angle et les valeurs du point d'arrêt (le moment où la première fenêtre contextuelle apparaît) sont comparés pour générer une fenêtre contextuelle. Si une fenêtre contextuelle avec le contenu suivant apparaît, vous devez réapprendre directement pour corriger la position et la posture du robot et réessayer.
Si la distance en ligne droite entre la position TCP actuelle et le TCP à la position d'arrêt diffère de plus de 20 cm
Si la différence entre l'angle d'articulation actuel et l'angle d'articulation au point d'arrêt diffère de plus de 1 à 3 axes (10 degrés) / 4 à 5 axes (30 degrés) / 6 axes (60 degrés)
Cette fonctionnalité est prise en charge uniquement pendant les opérations MoveL / MoveC / MoveB.
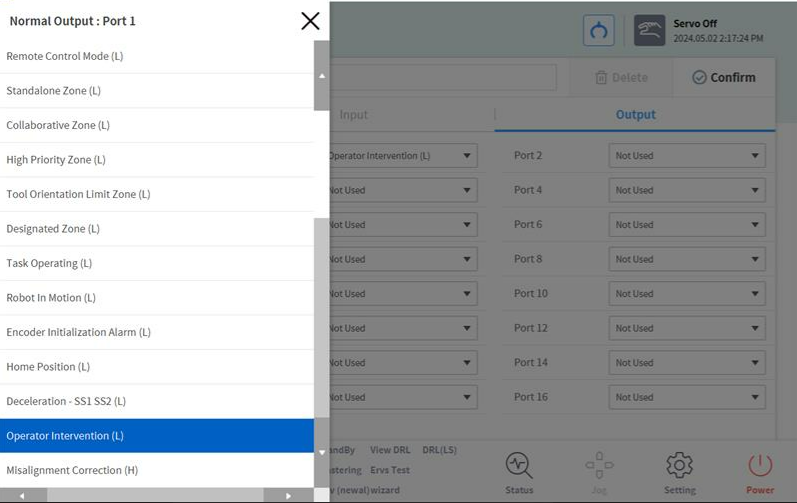
Vous pouvez utiliser la fonction Sortie normale pour signaler qu'une fenêtre contextuelle s'est produite. Le signal restera actif pendant que la fenêtre contextuelle s'affiche et sera désactivé lorsque la fenêtre contextuelle se termine.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Voici le scénario d'utilisation :
Recevez un signal d'entrée numérique de l'utilisateur ou d'un appareil connecté pendant l'exécution du programme.
Le robot s'arrête et une fenêtre contextuelle d'intervention de l'opérateur apparaît.
(Si vous utilisez l'apprentissage direct) Appuyez sur le bouton Utiliser le guidage manuel, puis appuyez sur le bouton situé à l'arrière du cockpit ou du boîtier d'apprentissage pour activer l'apprentissage direct. Une fois l'opération d'apprentissage direct terminée, appuyez sur le bouton Terminer le guidage manuel.
Appuyez sur le bouton Déplacer le long du chemin pour déplacer le robot le long du chemin.
Après avoir déplacé le robot autant que vous le souhaitez, appuyez sur le bouton Reprendre pour reprendre la tâche du robot et fermer la fenêtre contextuelle.