Démarrage du système
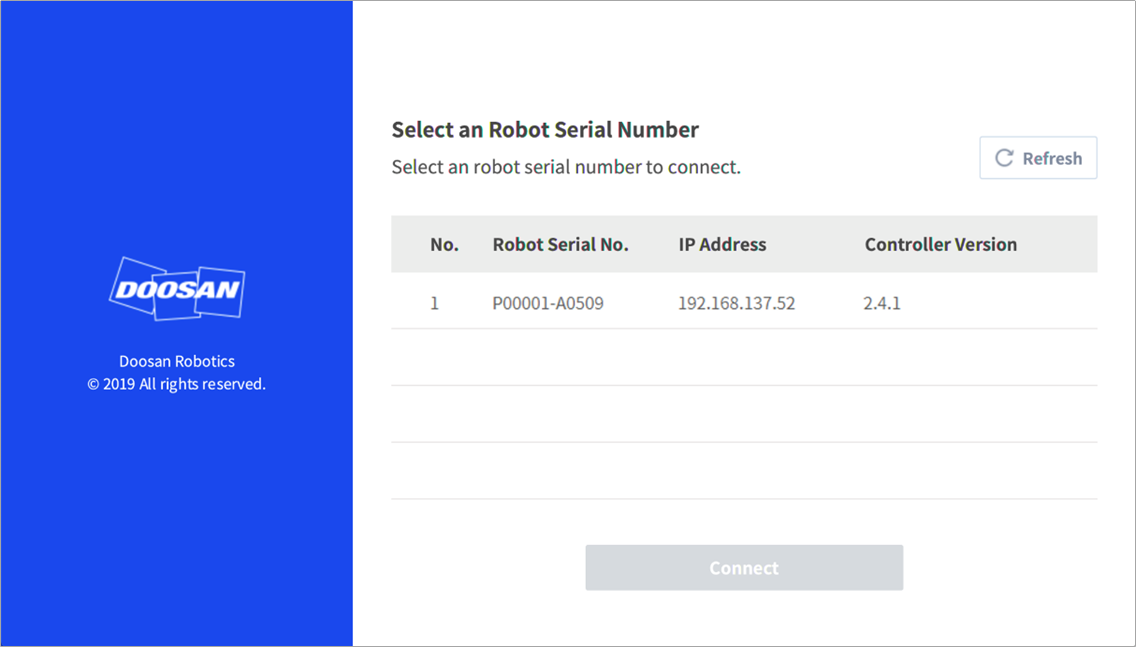
Une fois le système sous tension, il démarre. Une fois le démarrage terminé, l'application du système s'affiche sur le boîtier d'apprentissage. Pour plus d'informations à propos de l'application du système, référez-vous à «Configuration de l'écran du programme».
Dans le cas de DART-Platform (pour Windows),
- Exécutez la plate-forme DART installée sur le bureau ou l'ordinateur portable.
- Attendez environ 5 minutes que le contrôleur de robot finisse de démarrer.
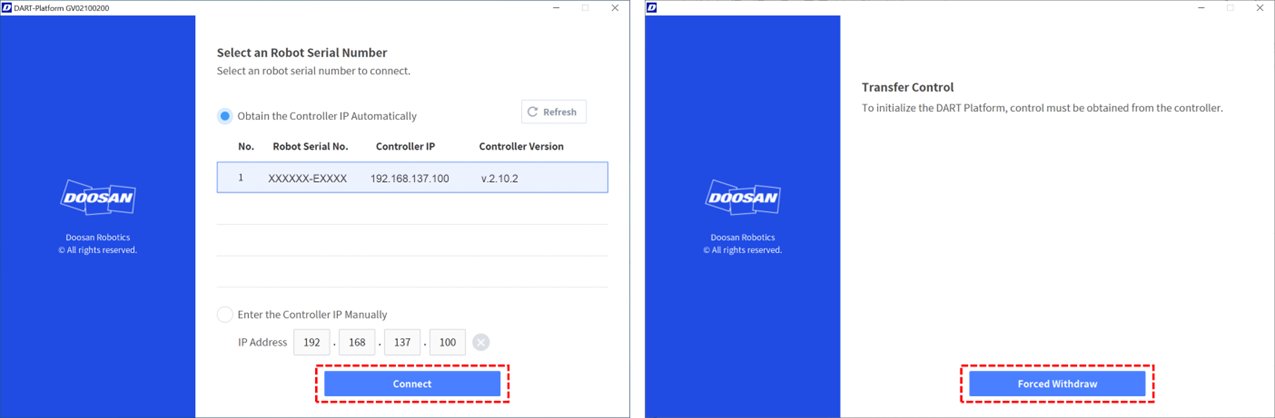
- Lorsque l'adresse IP est recherchée, vérifiez le numéro de série du connecté au réseau.
- Sélectionnez le robot que vous souhaitez connecter et cliquez sur le bouton « Connecter ».
- Appuyez sur le bouton Force Recall pour transférer le contrôle.
Remarque
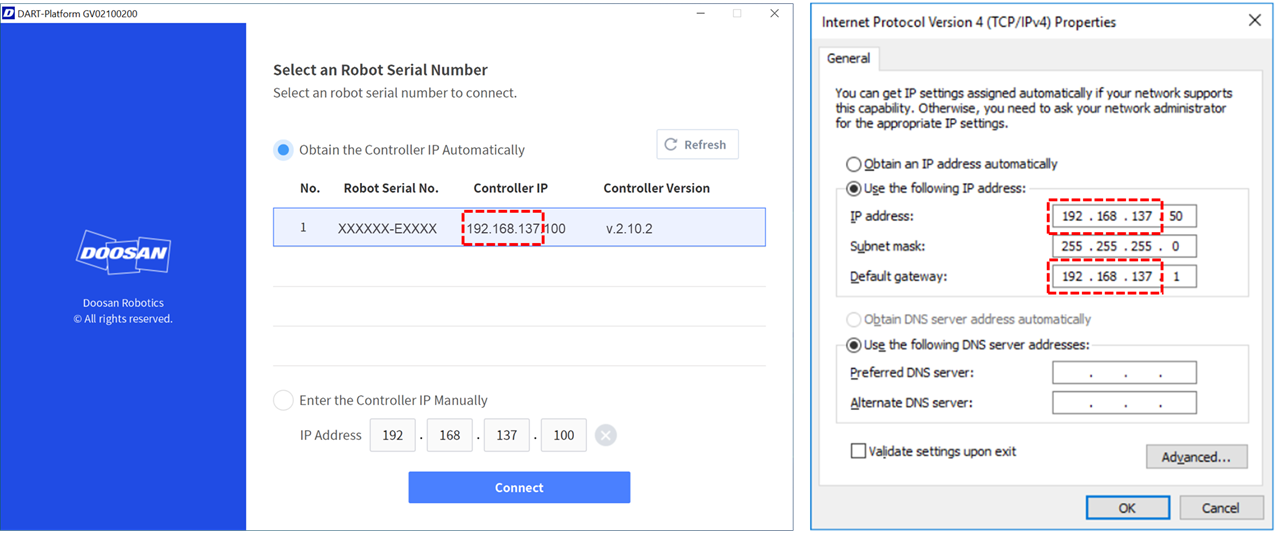
S'il n'y a pas de connexion entre le contrôleur et DART-Platform, remplacez la bande de classe C de l'adresse IP et la passerelle par défaut de l'ordinateur de bureau ou portable sur lequel DART-Platform est installé par la bande de classe C de l'adresse IP des contrôleurs, puis réessayez.
Si l'adresse IP n'est pas recherchée, sélectionnez « Saisir manuellement l'adresse IP du contrôleur » et procédez à la connexion. L'adresse IP par défaut du contrôleur est définie sur 192.168.137.100
Si le retrait forcé du contrôle continue d'échouer, vérifiez ce qui suit :
Fermez le programme et redémarrez.
Assurez-vous que le(s) bouton(s) d'arrêt d'urgence n'est pas enfoncé.
Si une ou plusieurs paires d'entrées numériques du contrôleur sont désignées pour le signal d'arrêt d'urgence/d'arrêt d'urgence à distance/STO (actif bas) dans le paramètre E/S de sécurité, assurez-vous que tous les signaux désignés sont désactivés ( Haut).
Vérifiez si le contrôleur a fini de démarrer.
Vérifiez l'état du robot. En cas de contrôle à distance, de récupération ou de retour en arrière, l'exécution de la plate-forme DART peut échouer.
Remarque
- Servo On (Servo activé) : Pour modifier la position du robot, son état doit être défini sur Servo On (Servo activé), dans lequel les articulations du robot sont alimentées et le robot est en état de veille. Pour plus d'informations à propos de Servo On (Servo activé), référez-vous à « Servo On (Servo activé)»
- Réglage de la date et de l'heure: La date et l'heure affichées sur le boîtier d'apprentissage et dans le message journal enregistré sur le robot suivent le réglage de date et heure du système, la date et l'heure doivent donc être configurées au moment du démarrage initial. Pour plus d'informations sur le réglage de la date et de l'heure, référez-vous à «Réglage de la date et de l'heure»
- L'utilisation de la plateforme DART permet le contrôle du robot sans le boîtier d'apprentissage.
- La plateforme DART dispose d'un écran affichant le robot connecté au réseau suite au démarrage, et les processus de vérification du numéro de série du robot et de connexion du robot ont lieu sur cet écran.