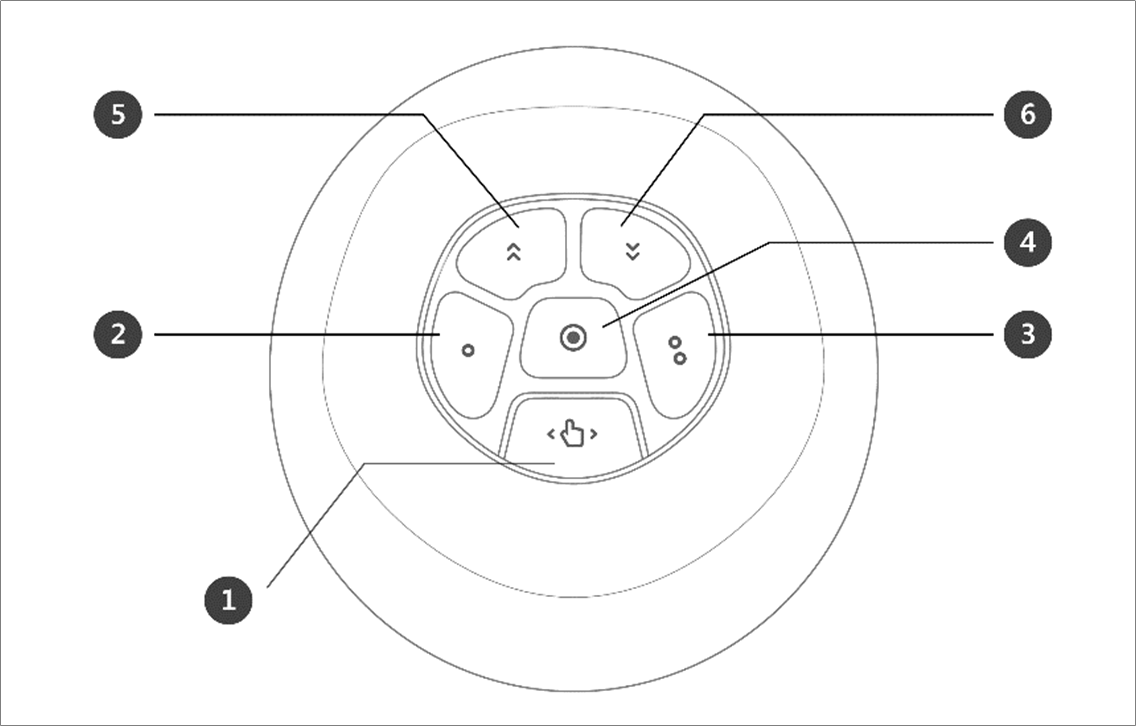
Déplace la mise au point affichée à l'écran d'une ligne vers le haut
6
One Line Down
Déplace la mise au point affichée à l'écran d'une ligne vers le bas
Remarque – Modification des réglages du cockpit
La modification des paramètres du bouton de guidage manueletdu mouvement des contraintes ne nécessite que 0,2 seconde.
L'appui sur le bouton Save Pose (Enregistrer la position) dans l'écran Skill Setting (Configuration des compétences) déplacera automatiquement la mise au point vers la position suivante.
Le bouton Cancel (Annuler) peut uniquement être utilisé dans la fenêtre Skill Setting (Configuration des compétences) qui gère les positions multiples.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.