Forme de la limite d'espace et de la zone
Les formes de la limite d'espace / zone sont définies selon les éléments suivants :
Élément | Description |
|---|---|
Cuboid | La forme de la limite d'espace / zone est définie comme un cuboïde.
|
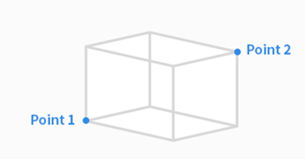
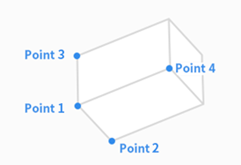
Tilted Cuboid | La forme de la limite d'espace / zone est définie comme un cuboïde incliné. Réglage par 4 Points
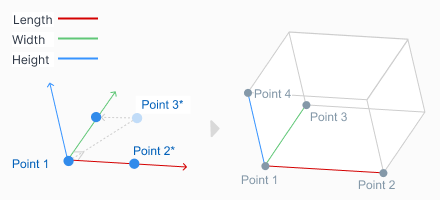
Réglage par 3 points et hauteur Entrez le point de référence (Point 1), le point sur l'axe des x (Point 2) et le point sur le plan xy (Point 3). Une fois le point de référence et les trois directions des axes déterminés, la taille du cuboïde incliné peut être spécifiée en définissant la longueur, la largeur et la hauteur. Le cuboïde incliné peut être déplacé parallèlement (traduction parallèle) en définissant le décalage x, y et z.
|
Cylinder | La forme de la limite d'espace / zone est définie comme un cylindre.
|
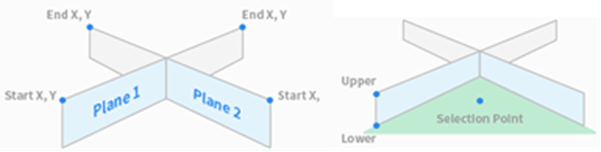
Multi-plane Box | La forme de la limite d'espace / zone est définie comme un boîtier multi-plan.
|
Sphere | La forme de la limite d'espace / zone est définie comme une sphère.
|