
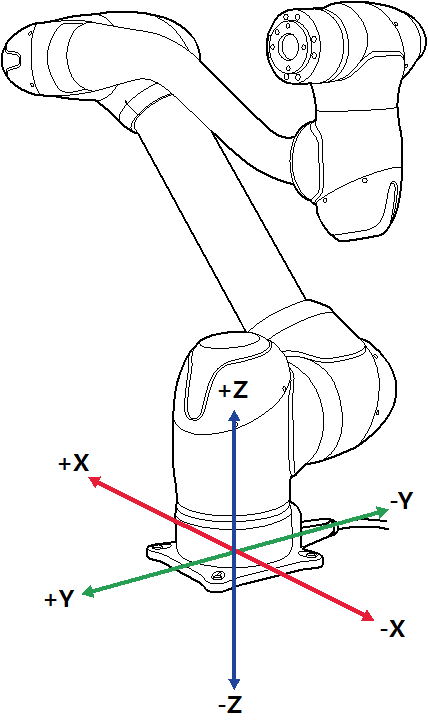
Exécution en fonction de la base du robot
Pour déplacer le robot en fonction de la base du robot, procédez comme suit :
Sélectionnez l'onglet Task (Tâche) dans l'écran Jog.
Sélectionnez les coordonnées d'affichage à utiliser en tant que base et sélectionnez Base comme point de référence des coordonnées de tâche.
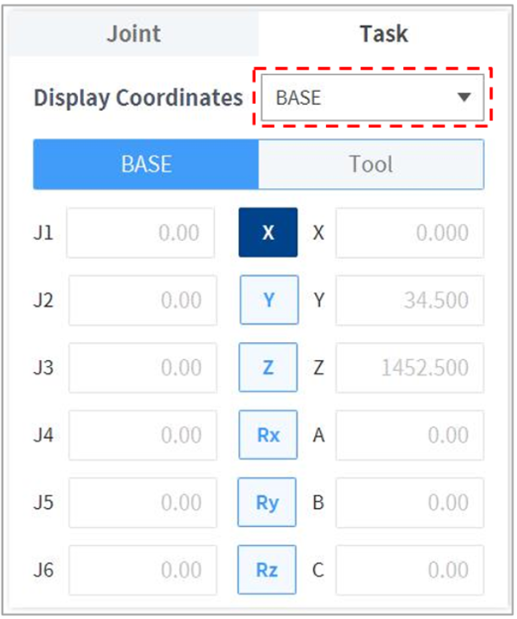
Sélectionnez Base Coordinates (Coordonnées Monde) pour procéder au déplacement.
Maintenez enfoncé le bouton Direction(


Remarque
La zone de sécurité n'est pas appliquée en mode virtuel.