
Bride E/S
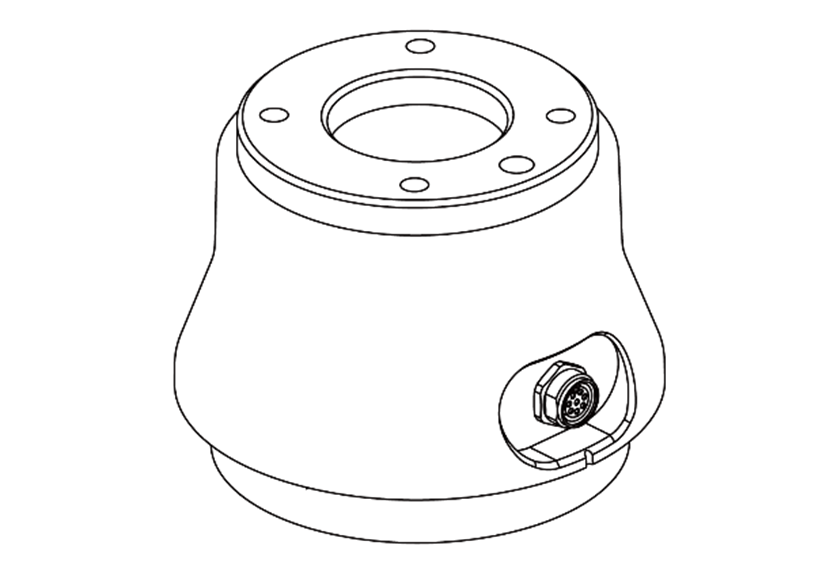
Le couvercle de la bride d'extrémité du robot présente un connecteur de spécification M8 à 8 broches ; la figure ci-dessous indique son emplacement et sa forme.
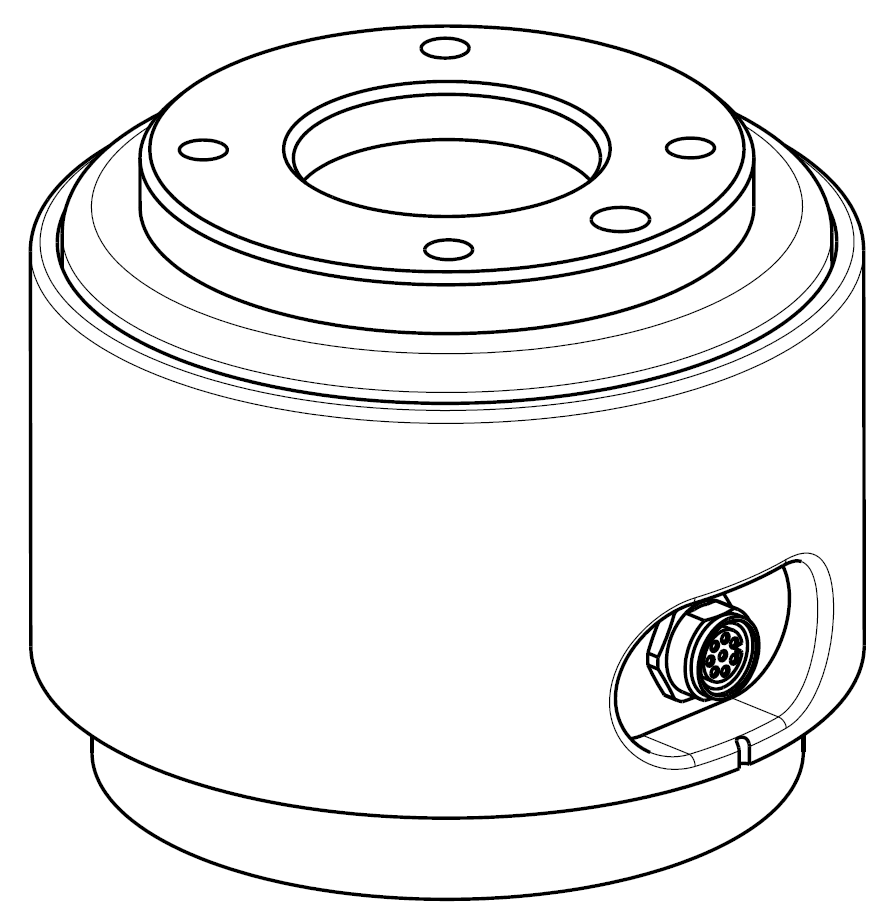
Les produits fabriqués à partir d'août 2022 ont changé de forme et d'orientation du connecteur, comme indiqué dans la figure ci-dessous.
Le connecteur fournit l'alimentation et les signaux de contrôle nécessaires au fonctionnement de la pince de préhension ou des capteurs intégrés dans les outils spécifiques du robot. Les câbles suivants sont des exemples de câbles industriels (des câbles équivalents peuvent être utilisés) :
- Phoenix contact 1404178 (droit)
- Phoenix contact 1404182 (angle droit)
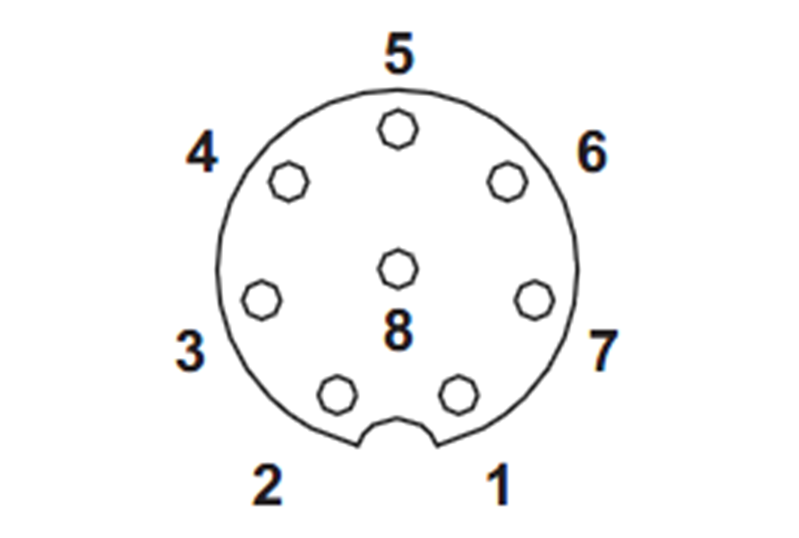
Le schéma des broches pour chaque connecteur est le suivant :
Diagramme schématique
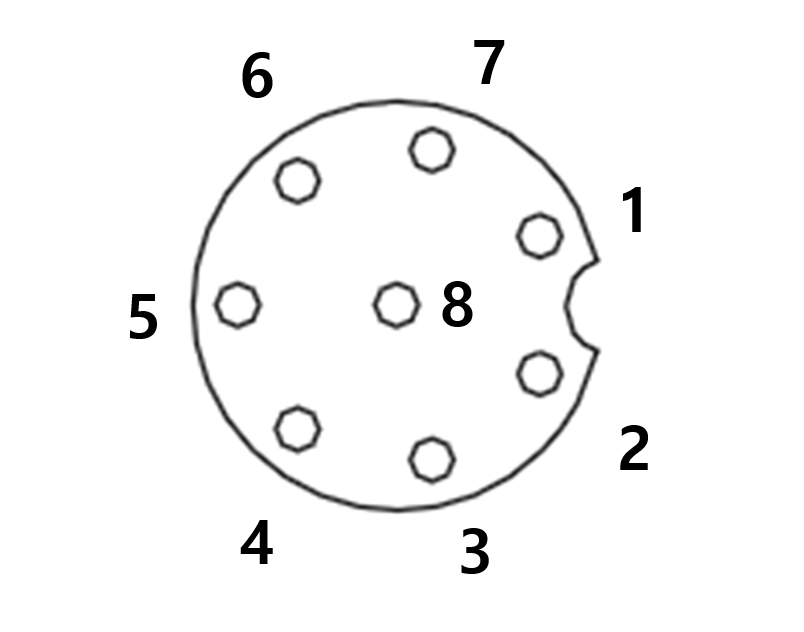
produits fabriqués à partir d'août 2022, l'orientation du connecteur a été modifiée comme indiqué dans la figure ci-dessous.
Les fonctions E/S fournies par le connecteur X1 sont différentes l'une de l'autre ; le tableau ci-dessous indique les paramètres d'E/S détaillés.
Paramètre X1 (E/S numérique, RS 485)
N° | Signal type | Description | Remarque |
1 | RS485 A | Débit en bauds maximum de 1 M | Mfg date 2020.07.06 ~ 2021.01.21 |
2 | RS485 B | Débit en bauds maximum de 1 M | |
3 | Digital Output 1 | défini sur PNP (Type de source, par défaut) ou NPN (Type de puits) | |
4 | Digital Output 2 | défini sur PNP (Type de source, par défaut) ou NPN (Type de puits) | |
5 | Power | +24V | |
6 | Digital Input 2 | PNP (Type de source, par défaut) | |
7 | Digital Input 1 | PNP (Type de source, par défaut) | |
8 | GND |
Paramètre X1 (E/S numérique, RS 485)
Depuis le 21 janvier 2021, le réglage a été modifié comme suit.
N° | Signal type | Description | Remarque |
1 | Digital Input 1 | PNP (Type de source, par défaut) | Mfg date Avant le 6 juillet 2020 Mfg date Après le 21 janvier 2021 Autres numéros de série appliqués VMA6F5-A0509S WAA6H7-A0912 WAA6H8-A0912 |
2 | Digital Output 1 | défini sur PNP (Type de source, par défaut) ou NPN (Type de puits) | |
3 | Digital Output 2 | défini sur PNP (Type de source, par défaut) ou NPN (Type de puits) | |
4 | RS485 A | Débit en bauds maximum de 1 M | |
5 | Power | +24V | |
6 | RS485 B | Débit en bauds maximum de 1 M | |
7 | Digital Input 2 | PNP (Type de source, par défaut) | |
8 | GND |
Avertissement
- Configurer les outils et les pinces après avoir vérifié la configuration E/S en fonction de la date de production (date de fabrication de l'étiquette du robot).
- Vous pouvez trouver ces informations sur Doosan Robotlab (https://robotlab.doosanrobotics.com).
- Si vous utilisez des outils du robot en ignorant la configuration E/S, le produit peut être endommagé de manière permanente.
L'alimentation interne de l'E/S à bride est réglée sur 24 V. Veuillez consulter le tableau ci-dessous pour obtenir des spécifications détaillées pour la connexion E/S.
Paramètre | Min | Type | Max | Unité |
Tension d'alimentation | - | 24 | - | V |
Courant d'alimentation | - | 2 | 3 | A |
Sortie numérique | - | 2 | - | EA |
Entrée numérique | - | 2 | - | EA |
Le décor est facturé comme suit depuis le 22 mars 2024
Réglage X1
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP (Type de source, par défaut) |
2 | Digital Output 1 | défini sur PNP (Type de source, par défaut) ou NPN (Type de puits) |
3 | Digital Output 2 | défini sur PNP (Type de source, par défaut) ou NPN (Type de puits) |
4 | Analog Input 1 / RS-485 + | réglé sur Tension (0-10 V) ou Courant (4-20 mA, par défaut) / Débit en bauds maximum de 1 M |
5 | Power | Réglez l'alimentation interne sur +24 V (par défaut), +12 V ou 0 V. |
6 | Analog Input 2 / RS-485 - | réglé sur Tension (0-10 V) ou Courant (4-20 mA, par défaut) / Débit en bauds maximum de 1 M |
7 | Digital Input 2 | PNP (Type de source, par défaut) |
8 | GND |
Réglez l'alimentation interne sur 24 V, 12 V ou 0 V.
Les spécifications électriques sont indiquées ci-dessous :
| Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Avertissement
- Configurez l'outil et la pince de sorte qu'ils ne présentent aucun risque de danger lorsque l'alimentation est éteinte.
(exemple : workpiece tombant de l'outil) - La borne n° 5 de chaque connecteur fournit 24 V en permanence lorsque l'alimentation est fournie au robot ; veillez donc à couper l'alimentation du robot lors de l'installation de l'outil et de la pince de préhension.