Compétence - essayez de prélever et de placer des échantillons
FACULTATIF NORMAL 20 MIN
Cet exemple est créé dans le Créateur de tâches. L'enregistreur de tâches ne prend pas en charge la fonction compétence.
Attention
- Avant d'essayer l'échantillon, assurez-vous de lire et de suivre (2.11.0.1_temp-fr_FR) Précautions d'emploi. Pour plus d'informations, reportez-vous à (2.11.0.1_temp-fr_FR) PARTIE 1. Manuel de sécuritéla section .
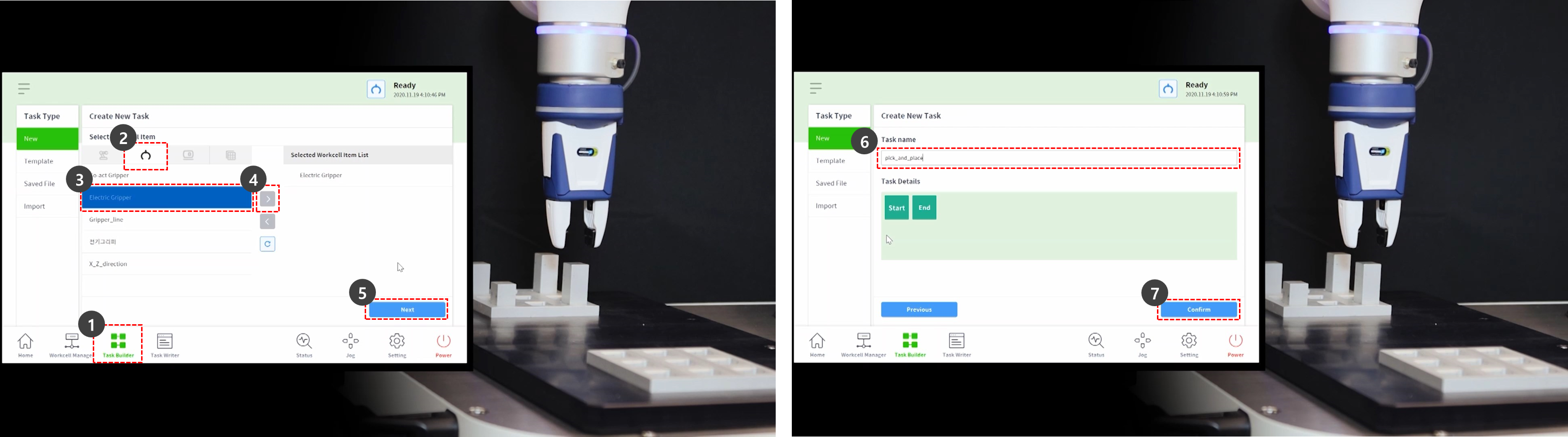
- Sélectionnez le générateur de tâches dans le menu inférieur.
- Sélectionnez l'icône Sélectionner un élément de cellule de travail > pince.
- Sélectionnez la pince enregistrée comme élément de cellule de travail. Cet échantillon ne peut pas être essayé s'il n'y a pas de pince enregistrée comme élément de cellule de travail.
- Appuyez sur le bouton > pour enregistrer l'élément de cellule de travail comme élément de cellule de travail sélectionné.
- Appuyez sur le bouton Suivant.
- Entrez le nom de la tâche.
- Appuyez sur confirmer.
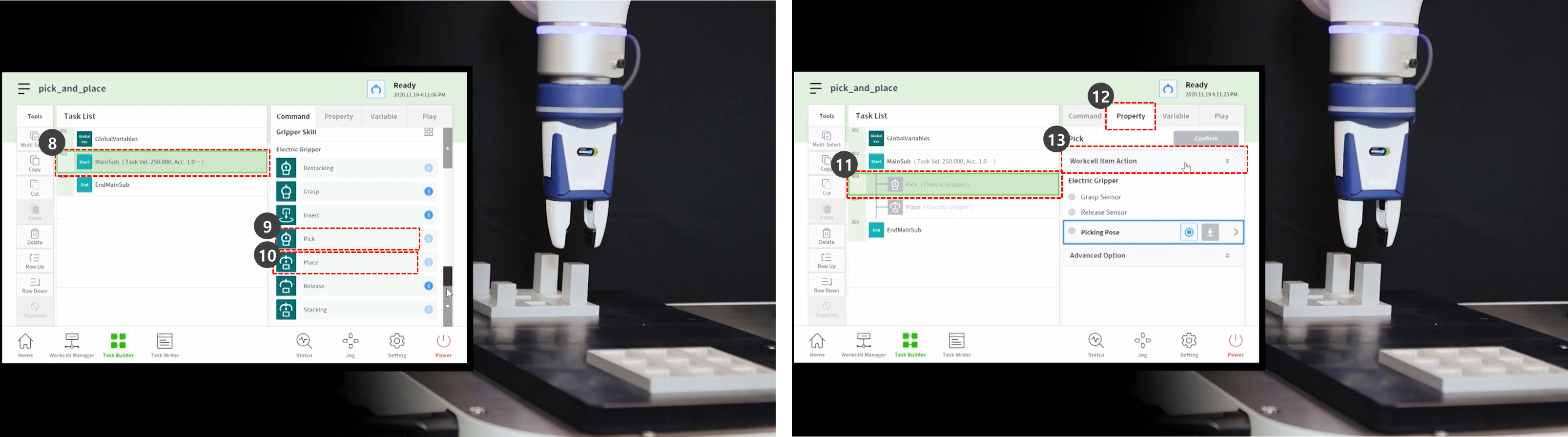
- Sélectionnez la commande MainSub sur la deuxième ligne de la liste des tâches. Une nouvelle commande est ajoutée à la ligne suivante de la ligne sélectionnée.
- Ajoutez la commande choisir compétence.
- Ajoutez la commande placer compétence.
- Sélectionnez la commande choisir sur la troisième ligne de la liste des tâches.
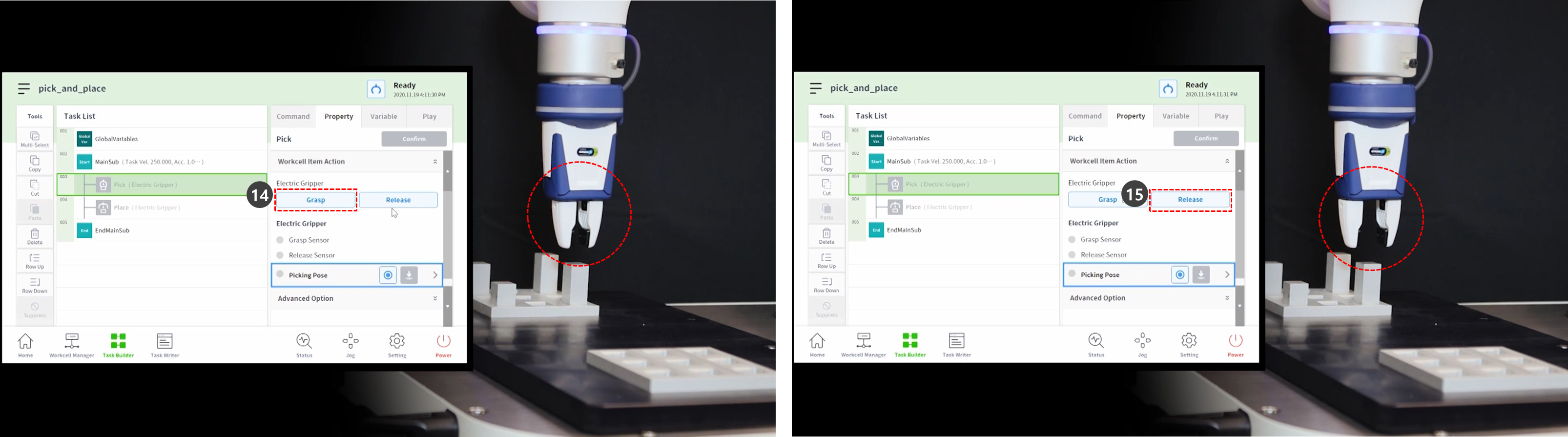
- Sélectionnez l'onglet propriété.
- Appuyez sur action de l'élément de cellule de travail pour développer le menu. Si l'élément de cellule de travail de pince est sélectionné, l'action de pince peut être testée pendant l'action Elément de cellule de travail.
- Pour tester la pince, appuyez sur le bouton de saisie et effectuez un mouvement de saisie.
- Pour tester la pince, appuyez sur le bouton de déverrouillage et effectuez un mouvement de déverrouillage.
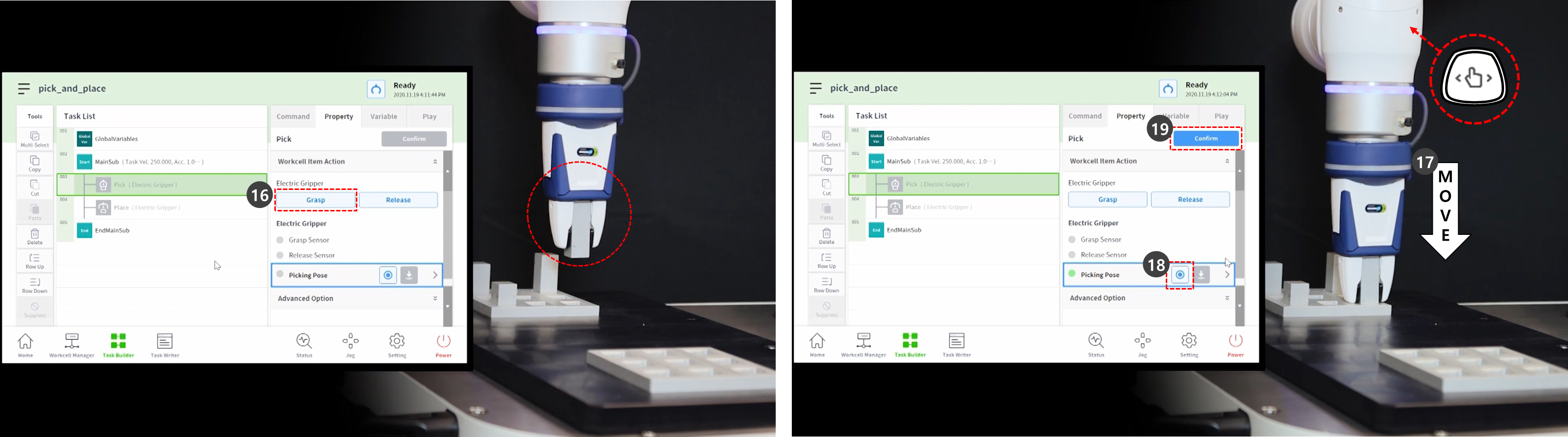
- Dans le cas de pièces légères, placez la pièce dans la pince et appuyez sur le bouton de saisie pour que le robot tienne la pièce. Effectuer un apprentissage pendant que la pince tient une pièce peut aider à établir une position précise.
- Cependant, il n'est pas obligatoire d'avoir le robot tenir une pièce pendant l'apprentissage, mais un exemple.
- Dans le cas de pièces lourdes, des situations dangereuses peuvent se produire car la pince peut perdre la pièce.
- Dans le cas de pièces lourdes, le poids de l'outil des réglages de l'outil doit inclure le poids de l'outil et le poids de la pièce.
- Utilisez l'apprentissage direct pour déplacer le robot jusqu'au point où la sélection sera effectuée.
- Appuyer sur le bouton de guidage manuel dans le cockpit et le maintenir enfoncé pour déplacer le robot.
- Appuyez sur le bouton Get pose de la position de sélection.
- Appuyer sur le bouton confirmer.
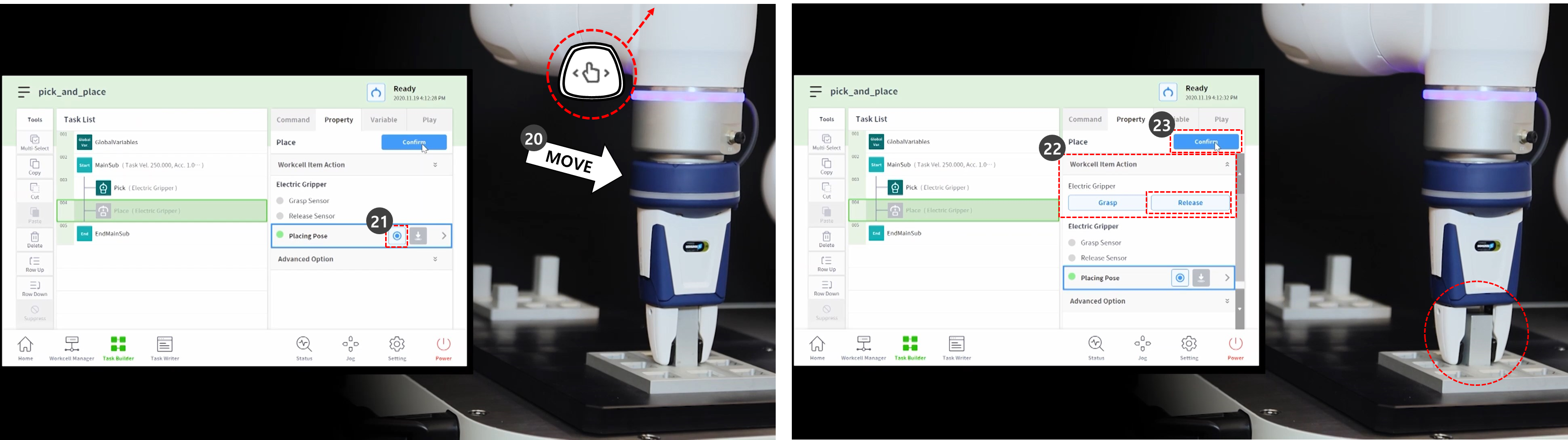
- Utilisez l'apprentissage direct pour déplacer le robot jusqu'au point où la place sera effectuée.
- Appuyez sur le bouton Get pose de la position de placement.
- Pour libérer la pièce de la pince, appuyer sur le bouton de déverrouillage.
- Appuyer sur le bouton confirmer.
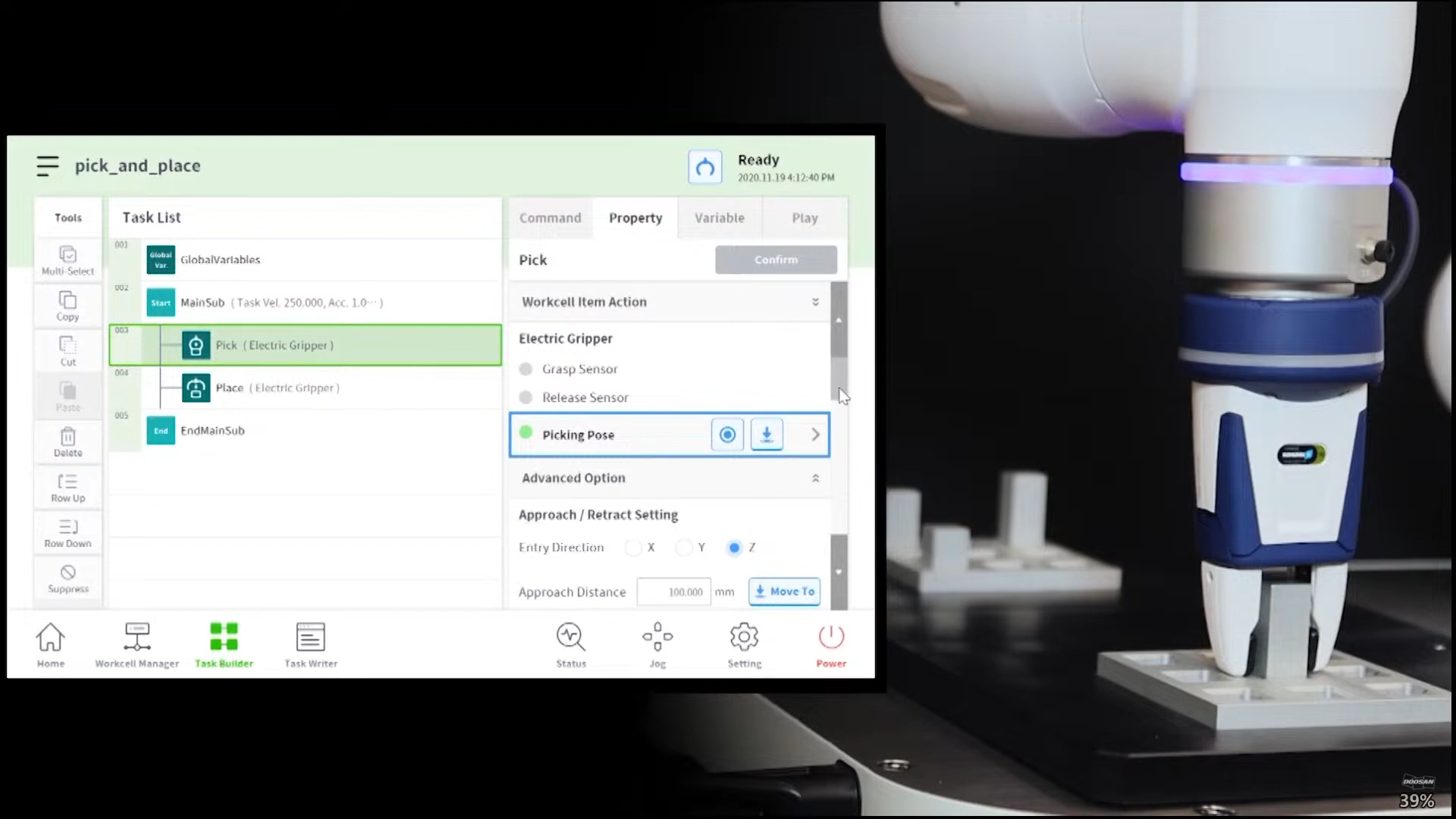
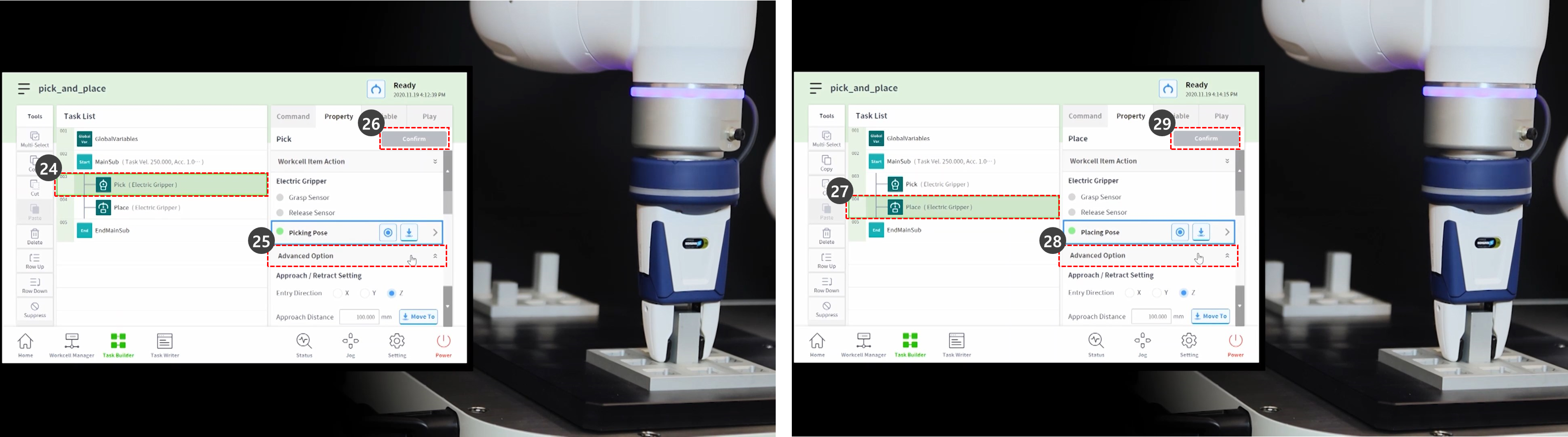
- Pour définir les paramètres détaillés des commandes de compétence choisir et placer, sélectionnez la commande choisir sur la troisième ligne de la liste des tâches.
- Appuyez sur l'option Avancé pour développer le menu et définir comme suit : Utilisez les valeurs par défaut pour les éléments non décrits ci-dessous.
- Direction d'entrée : Axe Z.
- Il définit la direction d'entrée de la position de sélection.
- Distance d'approche : 100 mm
- Elle définit la distance juste avant que le robot ne s'approche de la position de sélection. Il assure une distance d'approche suffisante.
- Distance de retrait : 100 mm
- Il définit la distance après que le robot se rétracte dans la direction définie à partir de la position de sélection. Il assure une distance de rétraction suffisante.
- Vitesse d'approche : 100 mm/s.
- Elle définit la vitesse d'approche inférieure à la valeur par défaut lorsque le robot s'approche d'un objet.
- Contrôle de conformité : Activé (vert)
- Contact de détection : Activé (vert)
- Il active les fonctions de contrôle de conformité et de détection de contact.
- Force de contact : 10N
- Tolérance de contact : 10 mm
- Force : 15N
- Décalage de l'éraflure : 2mm
- Relâcher le dispositif de préhension avant de prélever : Activé (vert)
- Il met la pince à l'état distribuer avant d'approcher l'emplacement de sélection.
- Poids de l'outil : Aucun
- Si la pièce n'est pas légère, le poids de la pièce et le poids de l'outil doivent être additionnés, ajoutés comme élément de cellule de poids de l'outil et sélectionnés.
- Direction d'entrée : Axe Z.
- Appuyer sur le bouton confirmer.
- Sélectionnez la commande placer sur la quatrième ligne de la liste des tâches.
- Appuyez sur l'option Avancé pour développer le menu et définir comme suit : Utilisez les valeurs par défaut pour les éléments non décrits ci-dessous.
- Direction d'entrée : Axe Z.
- Distance d'approche : 100 mm
- Distance de retrait : 100 mm
- Vitesse d'approche : 100 mm/s.
- Contrôle de conformité : Activé (vert)
- Contact de détection : Activé (vert)
- Il active les fonctions de contrôle de conformité et de détection de contact.
- Force de contact : 10N
- Tolérance de contact : 10 mm
- Force : 15N
- Poids de l'outil : Aucun
- Appuyer sur le bouton confirmer.
- Utilisez l'apprentissage direct pour déplacer le robot jusqu'au point de départ de Pick&place.
- Déplacer une pièce à l'emplacement de sélection.
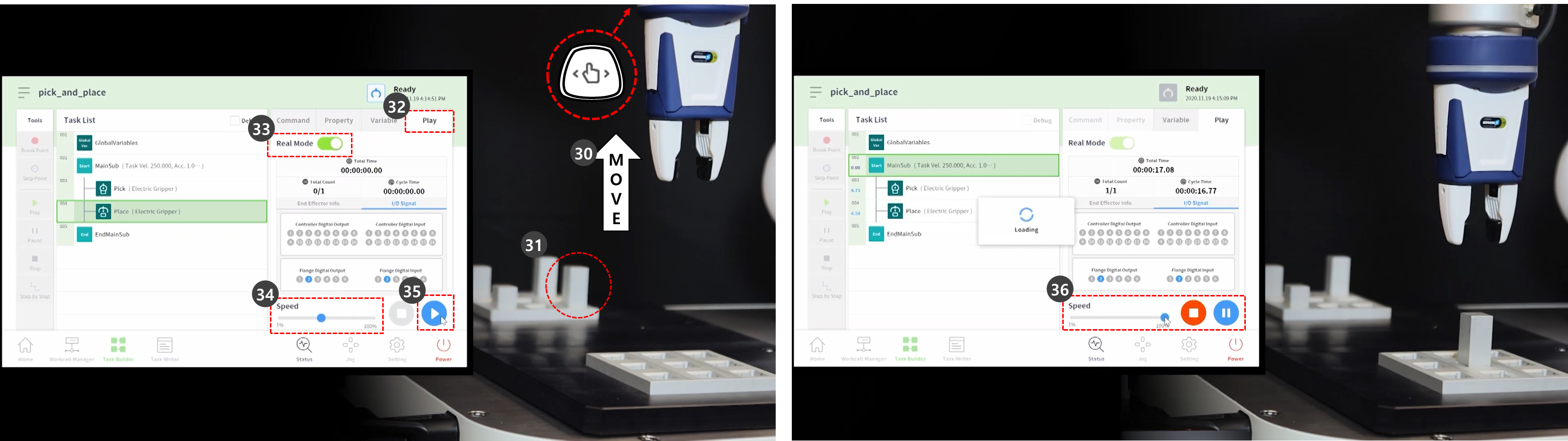
- Sélectionnez l'onglet lecture.
- Activez le bouton bascule mode réel.
- Réglez la barre coulissante de vitesse sur 10-30%.
- Cette barre coulissante de vitesse règle la vitesse définie de toutes les commandes sur le % sélectionné.
- Lorsqu'une tâche est exécutée pour la première fois après sa création, son exécution à faible vitesse peut éviter des risques inattendus.
- Appuyez sur le bouton lecture.
- Si la tâche est terminée sans problème, réglez la vitesse sur la valeur par défaut, 100 %, puis testez à nouveau.