
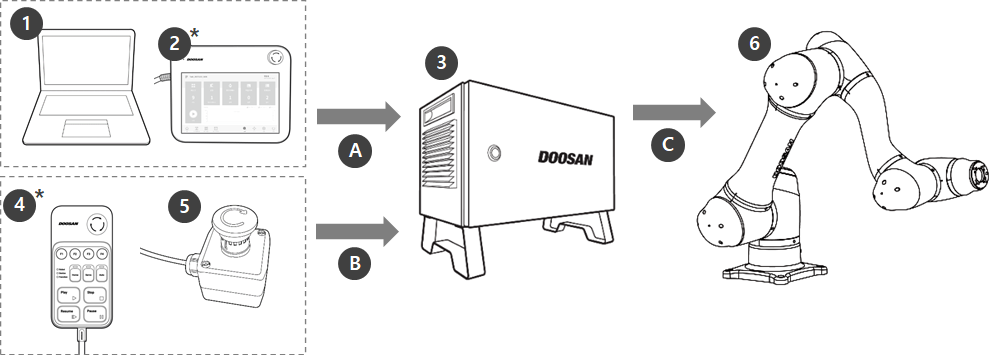
Configuration du système
| N° | Élément | Description |
|---|---|---|
| 1 | Ordinateur portable | Après l'installation de la DART Platform, un environnement de travail identique au boîtier d'apprentissage peut être configuré L'ordinateur portable n'est pas inclus dans l'emballage. Un tel ordinateur est nécessaire lors de l'installation de la DART Platform. |
| 2 | Boîtier d'apprentissage** | il s'agit d'un dispositif permettant de gérer l'ensemble du système, capable d'apprendre au manipulatro des positions particulières et de configurer le manipulator et les éléments relatifs à l'installation du contrôleur et du manipulator. |
| 3 | Contrôleur* | règle le mouvement du robot en fonction de la position ou du mouvement défini par le boîtier d'apprentissage. Il dispose de plusieurs ports d'E/S permettant de connecter et d'utiliser différents types d'équipements et d'appareils. |
| 4 | Boîtier intelligent** | le robot peut être facilement contrôlé à l'aide d'un boîtier capable d'effectuer des fonctions simples telles que mettre le servo hors tension/sous tension ou exécuter/fermer les programmes prédéfinis. |
| 5 | Bouton d'arrêt d'urgence* | lorsqu'un ordinateur portable est intégré au système, il est utilisé comme bouton d'arrêt d'urgence du boîtier d'apprentissage |
| 6 | Manipulator* | il s'agit d'un robot industriel collaboratif pouvant réaliser des tâches de transport et d'assemblage à l'aide de divers outils. |
| A | Command/ Monitoring | |
| B | Command | |
| C | Power Supply/ Network |
- Les éléments sont indiqués comme éléments standard (*) et éléments optionnels (**, vendus séparément)