
Fixation du robot
Utilisez des boulons M8 pour les quatre trous de 9,5 mm au niveau de la base du manipulateur pour le fixer.
- Il est recommandé d'utiliser un couple de serrage de 20 Nm pour serrer les boulons. Utilisez des rondelles (ressort plat) pour éviter le desserrage lié aux vibrations.
- Utilisez deux épingles de marquage de Φ5 pour installer le manipulateur dans un lieu fixe de manière précise.
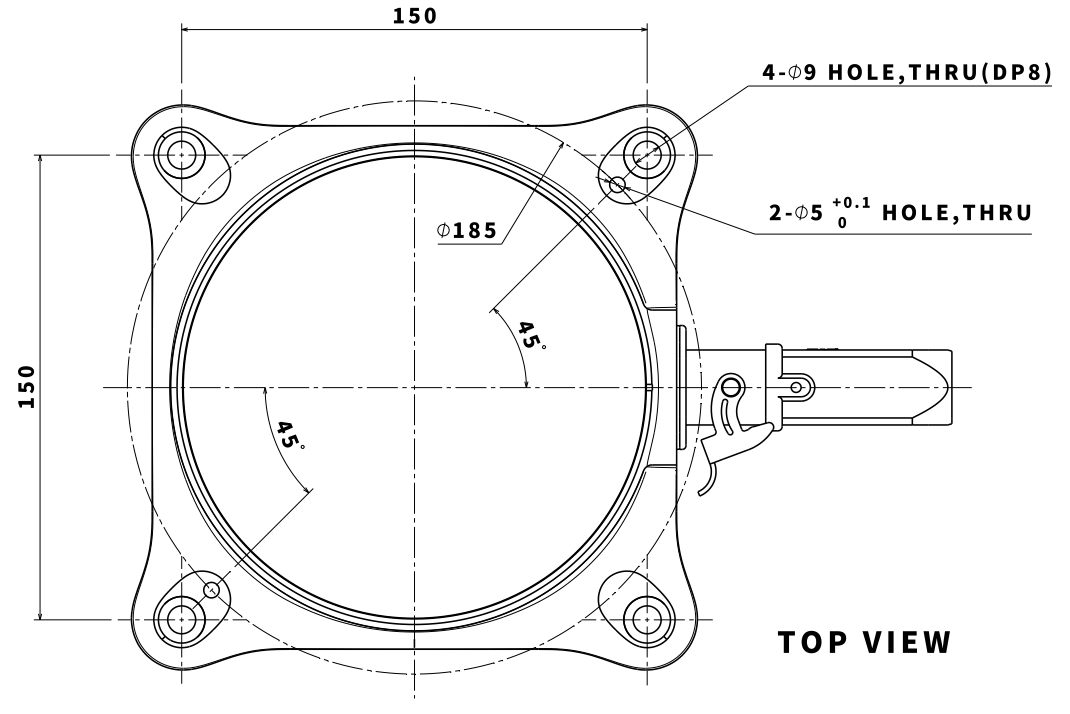
Dessin de la base du manipulateur (série M) [mm]
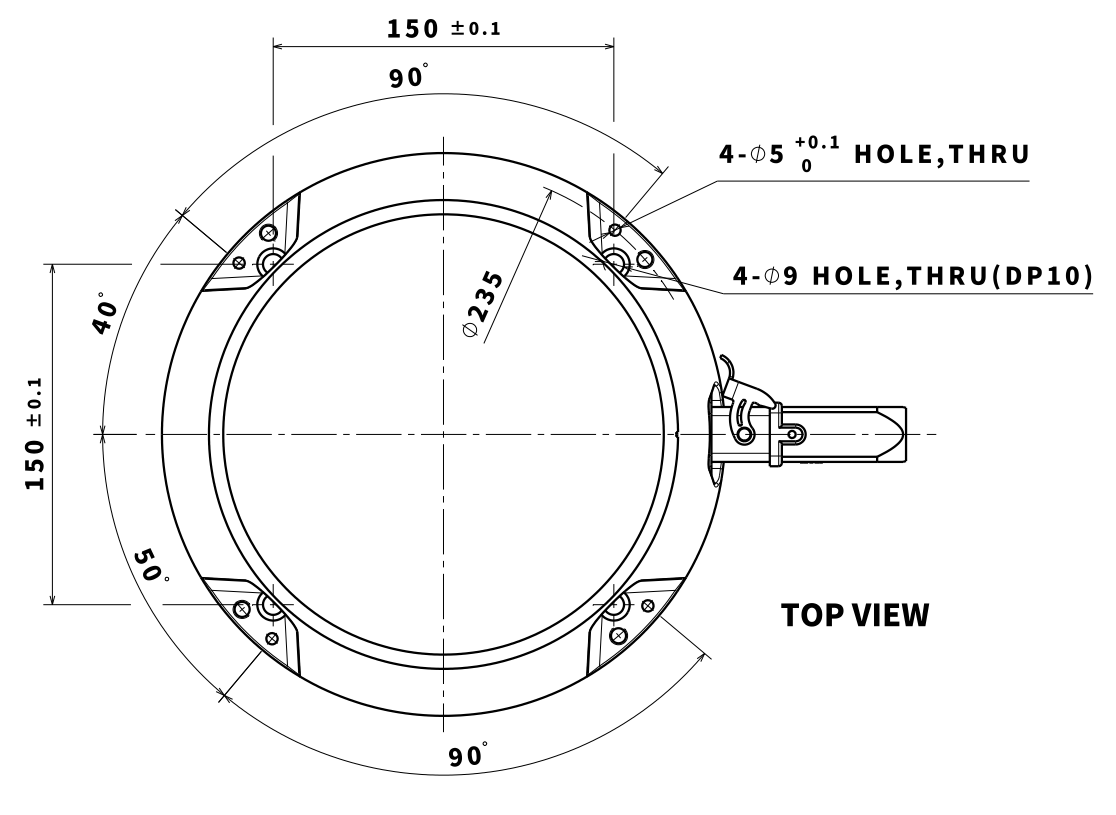
Dessin de la base du manipulateur (série H) [mm]
Avertissement
- Serrez les boulons à fond afin d'éviter tout risque de desserrage pendant le fonctionnement du robot.
- Installez la base du robot sur une surface solide pouvant supporter la charge générée pendant le fonctionnement (10 fois le couple de serrage maximum et cinq fois le poids du robot).
- Le robot interprète la vibration de la base du manipulateur comme une collision et active l'arrêt d'urgence. Ainsi, concernant les lieux d'installation impliquant un changement de position automatique, n'installez pas la base du robot à un endroit sujet à une accélération de mouvement importante.
- Procédez au montage du bras du manipulateur dans un lieu spécifique à l'aide de méthodes appropriées. La surface de montage doit être solide.
- Le manipulateur peut être endommagé s'il entre en contact avec l'eau pendant une période prolongée, ne l'utilisez donc pas dans un environnement humide ou sous-marin.