Configuration du système
| N° | Élément | Description |
|---|---|---|
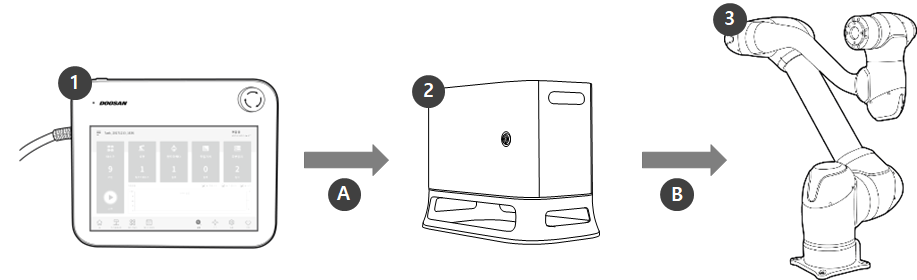
| 1 | Boîtier d'apprentissage | il s'agit d'un dispositif permettant de gérer l'ensemble du système, capable d'apprendre au robot des positions particulières et de configurer les paramètres relatifs au manipulateur et au boîtier de contrôle. |
| 2 | Contrôleur | règle le mouvement du robot en fonction de la position ou du mouvement défini par le boîtier d'apprentissage. Il dispose de plusieurs ports d'E/S permettant de connecter et d'utiliser différents types d'équipements et d'appareils. |
| 3 | Manipulateur | il s'agit d'un robot industriel collaboratif pouvant réaliser des tâches de transport et d'assemblage à l'aide de divers outils. |
| A | Commande/ surveillance | |
| B | Puissance/ réseau |
Remarque
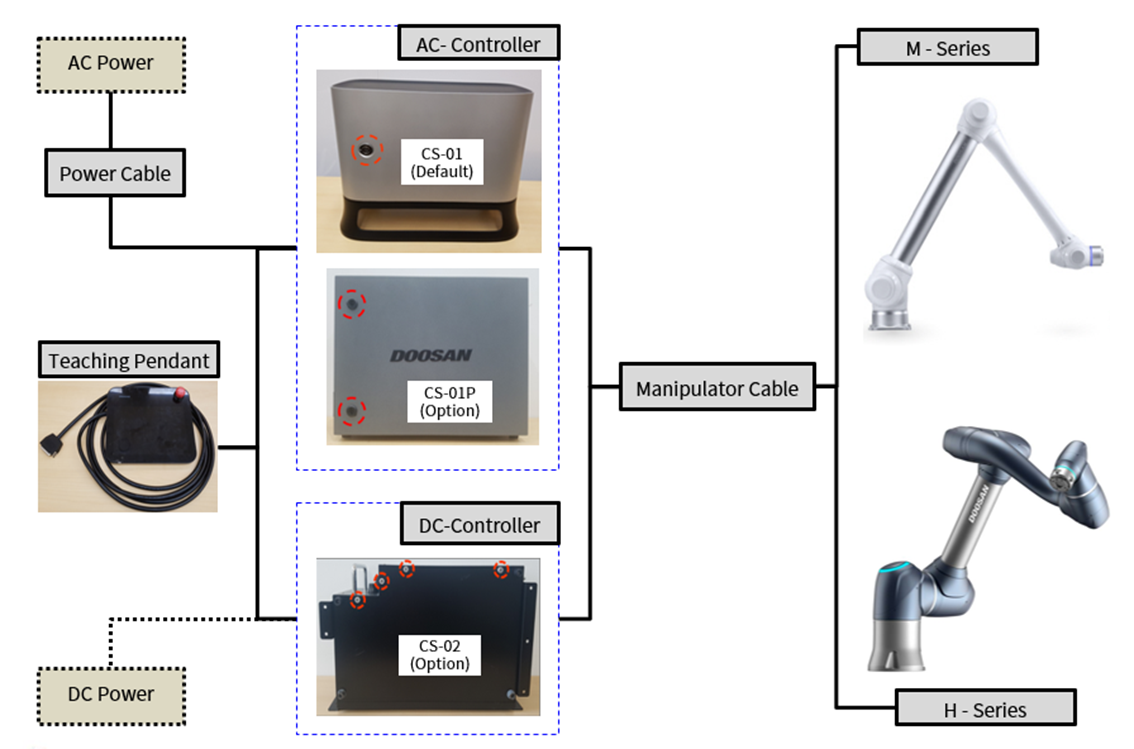
- Référez-vous aux configurations système du robot des séries M et H ci-dessous.