
Coordonnées
Coordonnées du monde
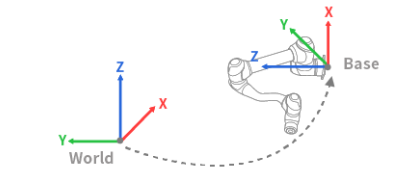
Les coordonnées du monde du robot peuvent être définies à partir des coordonnées du monde. Si les coordonnées du robot sont les coordonnées de base, cette étape peut être ignorée.
Les coordonnées du monde peuvent être définies dans Robot Parameters > Paramètres du robot > coordonnées du monde.
Les coordonnées du monde sont utilisées lorsque l'emplacement d'installation de la base du robot est physiquement déplacé/pivoté.
La modification des coordonnées du monde appliquera le même mouvement/rotation à l'écran du simulateur de robot.
Remarque
Les coordonnées du monde peuvent également être utilisées même après que l'emplacement de la base et l'angle ont été modifiés après l'apprentissage du robot. Si les coordonnées des tâches créées par l'apprentissage du robot dans le passé sont modifiées de BASE à MONDE, un décalage correspondant au déplacement/rotation des coordonnées du monde est appliqué à toutes les coordonnées de mouvement.
Menu
Éléments | Description | |
|---|---|---|
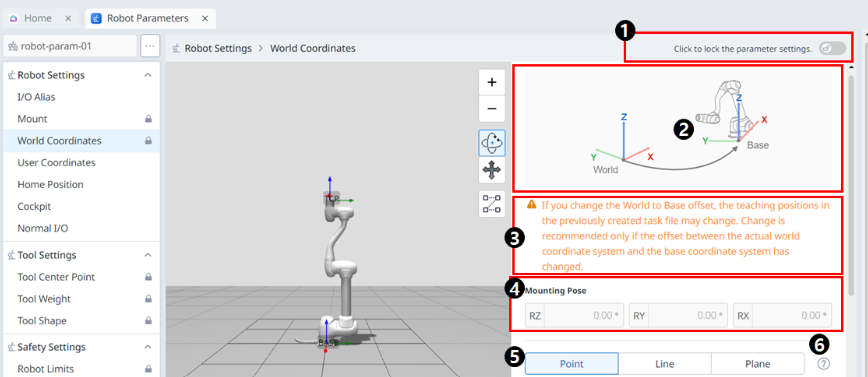
| 1 | Bouton à bascule de verrouillage | Permet de verrouiller la valeur définie. Le mot de passe de sécurité est requis pour modifier la valeur définie. |
| 2 | Image d'information | Il s'agit d'une image informative requise pour le réglage. |
| 3 | Message d'information | Il s'agit d'un message d'information requis pour le réglage. |
| 4 | Pose de montage | Cette section inclut les valeurs de pose de montage pour A, B et C. |
| 5 | Paramètres de point, de droite et de plan | C'est ici que vous pouvez sélectionner et définir les éléments souhaités parmi un point, une droite et un plan. |
| 6 | Guide pédagogique | Ceci est un guide de configuration de point, de droite et de plan. |
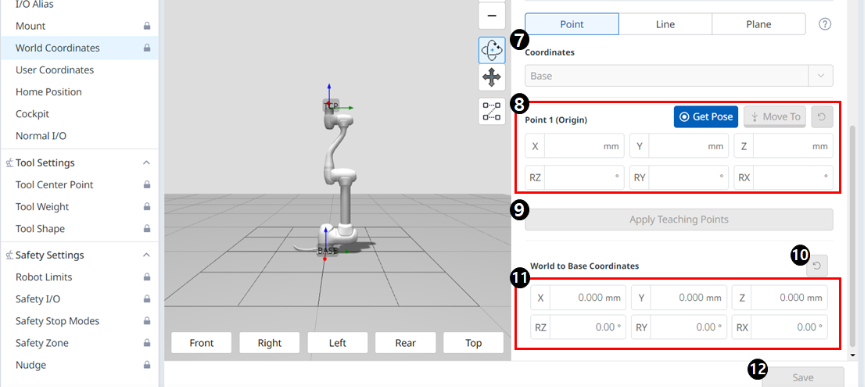
| 7 | Coordonnées | C'est ici que vous pouvez sélectionner la coordonnée souhaitée entre base et monde. |
| 8 | Réglage du point 1 | C'est là que vous pouvez définir les paramètres pour chacun des 6 axes, ainsi que pour obtenir la pose et le déplacement vers. |
| 9 | Bouton appliquer les points d'apprentissage | Ce bouton vous permet de saisir les paramètres souhaités et de les appliquer. |
| 10 | Réinitialisation des coordonnées du monde à la base | Ce bouton vous permet de réinitialiser les coordonnées du monde à base déjà saisies. |
| 11 | Paramètre coordonnées monde-base | C'est ici que vous pouvez entrer les paramètres pour les 6 axes. |
| 12 | Bouton appliquer | La valeur de réglage peut être appliquée. |
Coordonnées de l'utilisateur
Menu
Éléments | Description | |
|---|---|---|
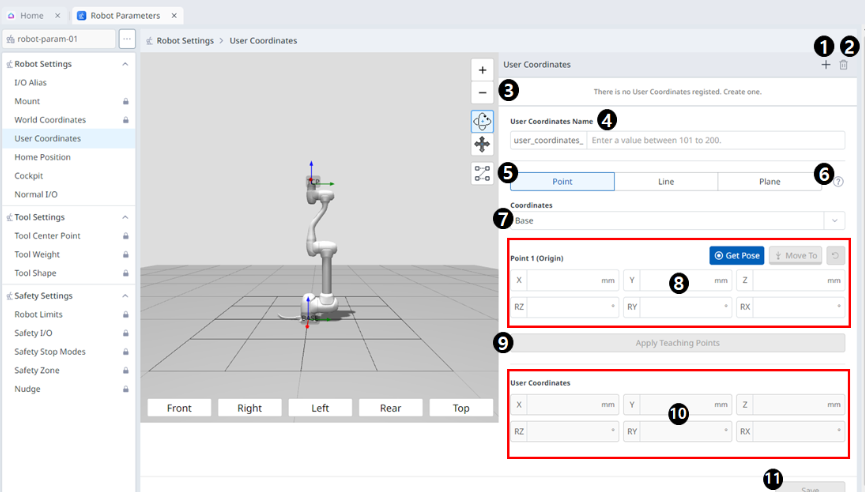
| 1 | Ajouter nouveau | Ce bouton vous permet d'ajouter des coordonnées utilisateur. Jusqu'à 100 coordonnées utilisateur peuvent être ajoutées. |
| 2 | Supprimer | Ce bouton vous permet d'ajouter des coordonnées utilisateur. |
| 3 | Coordonnées utilisateur sélectionnées | Ceci est une liste des coordonnées utilisateur ajoutées. |
| 4 | Nom des coordonnées de l'utilisateur | C'est ici que vous pouvez définir les noms des coordonnées utilisateur. Vous pouvez saisir un nombre compris entre 101 et 200, d'une longueur maximale de 40 caractères. |
| 5 | Paramètres de point, de droite et de plan | C'est ici que vous pouvez définir chaque point, droite et plan. |
| 6 | Icône d'information | Un guide des coordonnées utilisateur est fourni. |
| 7 | Coordonnées | C'est ici que vous pouvez sélectionner base ou monde comme base de la valeur souhaitée. |
| 8 | Réglage du point 1 | C'est là que vous pouvez définir les paramètres pour chacun des 6 axes, ainsi que prendre la pose et se déplacer vers. |
| 9 | Bouton appliquer les points d'enseignement | Ce bouton vous permet de saisir les paramètres souhaités et de les appliquer. |
| 10 | Coordonnées de l'utilisateur | Dans la section coordonnées de l'utilisateur, vous pouvez entrer chacune des valeurs souhaitées. |
| 11 | Enregistrer | La valeur de réglage peut être appliquée. |