
Réglage du robot
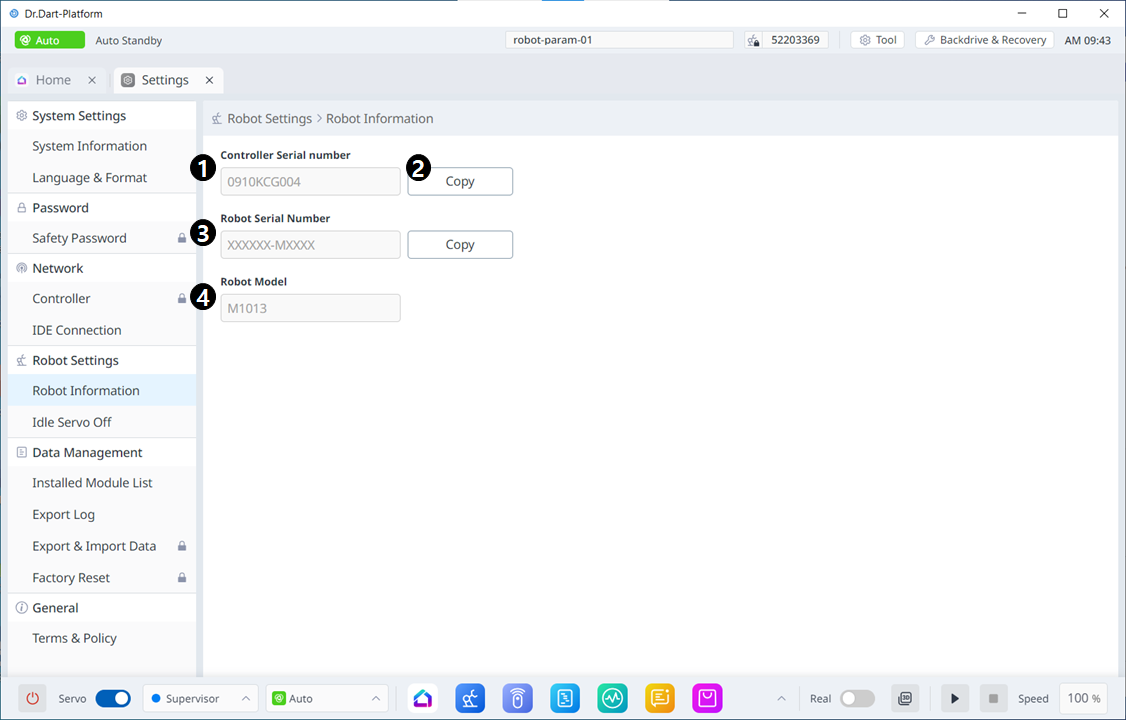
Définition des informations du robot
Menu
Éléments | Description | |
|---|---|---|
| 1 | Numéro de série du contrôleur | C'est là que le numéro de série du contrôleur est vu. |
| 2 | Copier le numéro de série du contrôleur | Ce bouton vous permet de copier le numéro de série. |
| 3 | Numéro de série du robot | C'est là que le numéro de série du robot est vu. |
| 4 | Modèle de robot | C'est là que le nom du modèle de robot est vu. |
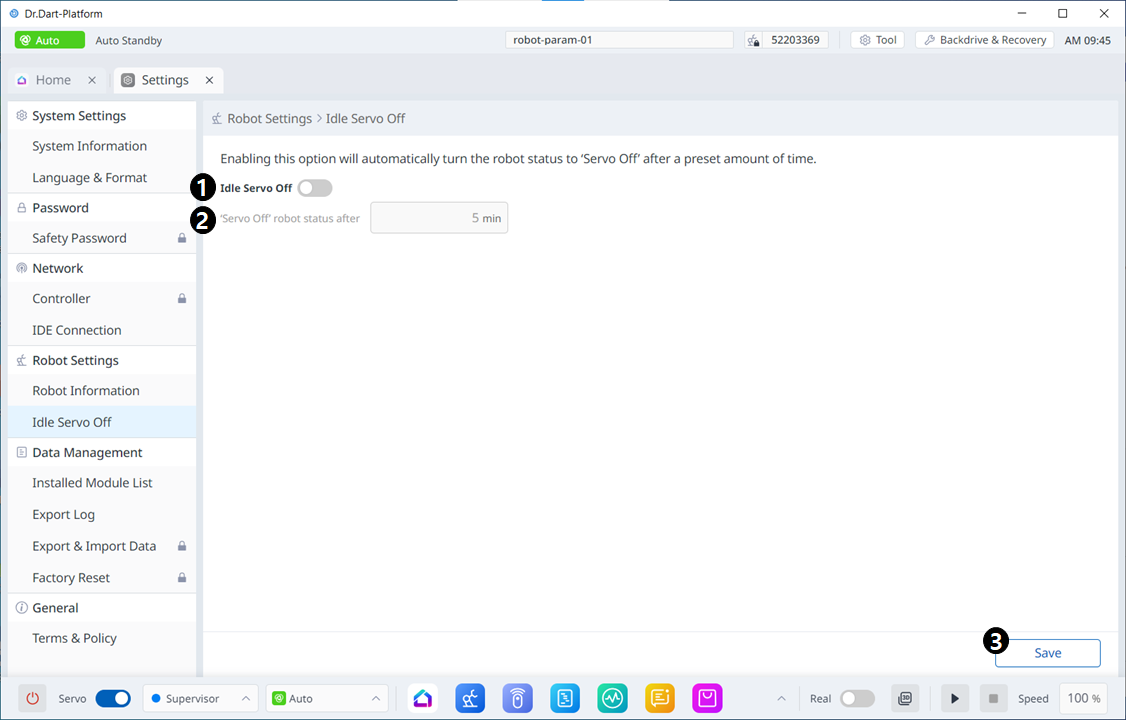
Asservissement de ralenti du robot désactivé
Si le robot est inactif pendant un certain temps, il est automatiquement réglé sur l'état sécurité désactivée. La valeur par défaut est de 5 minutes, mais l'heure peut être modifiée à une heure que l'utilisateur préfère.
Menu
Éléments | Description | |
|---|---|---|
| 1 | Activer la désactivation du servo de ralenti | Ce bouton vous permet d'activer la désactivation du servo inactif. |
| 2 | Réglage de désactivation du servo | Ce champ permet de désactiver le servo inactif en minutes. |
| 3 | Enregistrer | Ce bouton vous permet d'enregistrer les paramètres modifiés. |
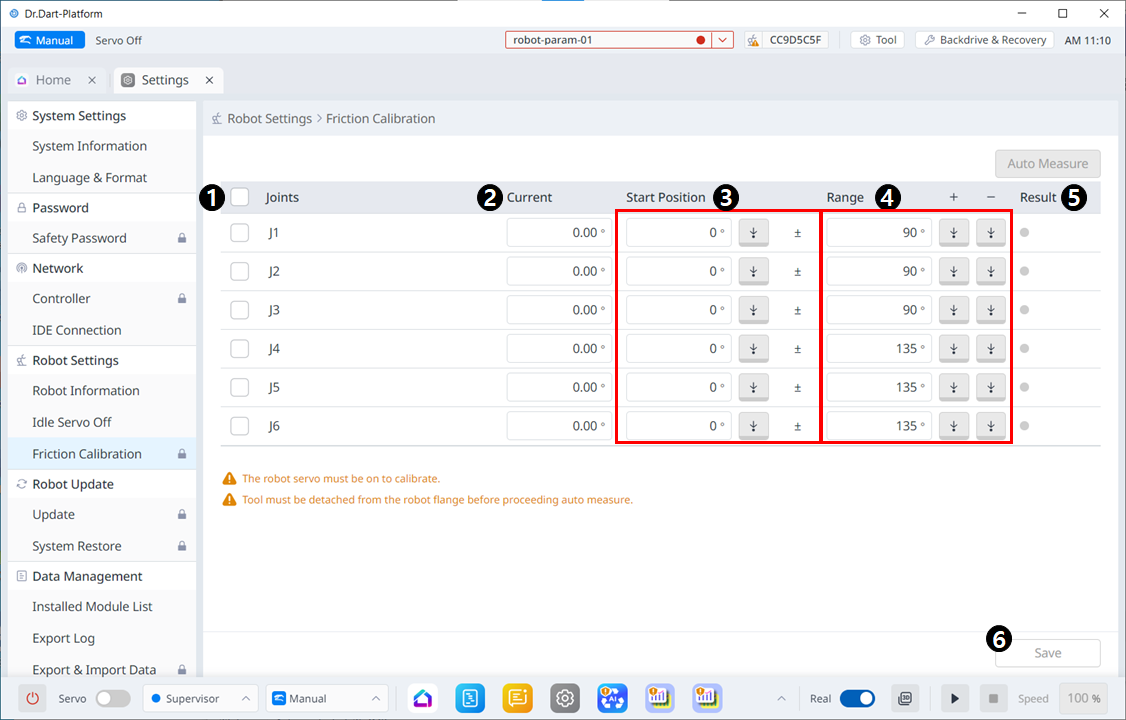
Calibration du frottement
Ce menu n'est accessible que pour les robots des séries E et A.
Menu
Éléments | Description | |
|---|---|---|
| 1 | Case à cocher joint | Sélectionnez la liaison à mesurer automatiquement. |
| 2 | Courant électrique | Affiche la posture actuelle du robot. |
| 3 | Position de départ | Entrez la posture à laquelle la liaison commencera lors de l'exécution de la mesure automatique. Les axes non sélectionnés nécessitent également une entrée. |
| 4 | Plage | Entrez la plage dans laquelle l'axe se déplacera. Seuls les axes cochés autorisent la saisie. |
| 5 | Résultat | Affiche les résultats de la mesure automatique. |
| 6 | Enregistrer | Les résultats mesurés sont appliqués aux subordonnés. |