
Paramètres d'E/S
E/S normales
Menu
Éléments | Description | |
|---|---|---|
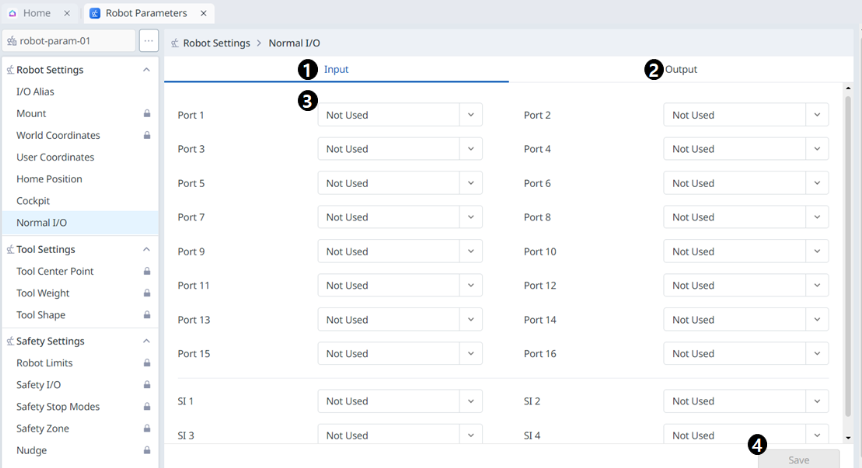
| 1 | Entrée normale | Il s'agit de la section dans laquelle vous pouvez définir les éléments à saisir. |
| 2 | Sortie normale | Il s'agit de la section où vous pouvez définir ce qui doit être sorti. |
| 3 | Composant de port | Les options répertoriées dans le menu déroulant sont différentes pour l'entrée et la sortie. Pour entrée, les options du menu déroulant pour chaque port sont les suivantes : Non utilisé Mise sous tension (H) Mise hors tension (H) Pour sortie, les options du menu déroulant pour chaque port sont les suivantes : Non utilisé Safe Operating Stop (L) Normal Speed (L) Reduced Speed (L) Auto Mode (L) Manual Mode (L) Standalone Zone (L) Collaborative Zone (L) High Priority Zone (L) Zone limite d'orientation de l'outil (l) Designated Zone (L) Tâche en fonctionnement (l) Robot en mouvement (l) Alarme de maîtrise (l) Position initiale (L) DÉCÉLÉRATION - SS1 SS2 (L) |
| 4 | Enregistrer | Ceci permet d'appliquer les valeurs de consigne. |
Paramètre E/S de bride
Ce menu n'est accessible que lors de la connexion à une nouvelle bride installée sur un robot.
Menu
Éléments | Description | |
|---|---|---|
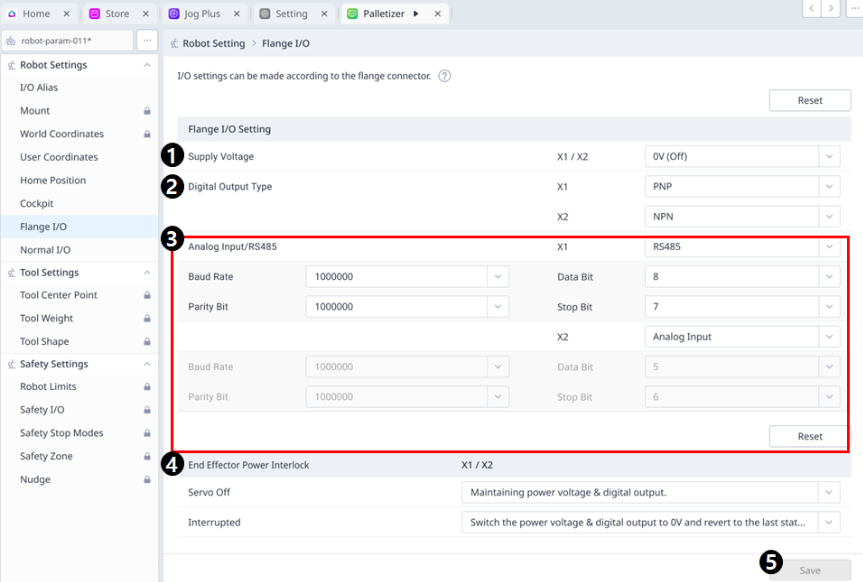
| 1 | Tension d'alimentation |
|
| 2 | Type de sortie numérique | Permet de définir le type de sortie numérique pour chaque port X1 et X2.
|
| 3 | Analogique Input/RS485 Mode Setting | Permet de sélectionner entrée analogique ou RS485.
Lors de la sélection de l'entrée analogique,
Lorsque vous sélectionnez RS485, Vous pouvez choisir parmi les options suivantes
|
| 4 | Verrouillage de l'alimentation de l'effecteur terminal | Fournit une fonction permettant de définir l'opération lorsque le servo est désactivé ou interrompu.
|
| 5 | Enregistrer | Ceci permet d'appliquer les valeurs de consigne. |