
Module Backdrive
La fonction Backdrive coupe l'alimentation des moteurs, relâchant uniquement les freins pour permettre aux articulations du robot de se déplacer sous l'effet d'une force externe. Cette fonction est utilisée lorsque le robot ne peut pas revenir à l'état normal en mode Recovery ou guidage manuel. Avec le mode Backdrive, l'utilisateur peut engager ou désengager le frein de chaque articulation.

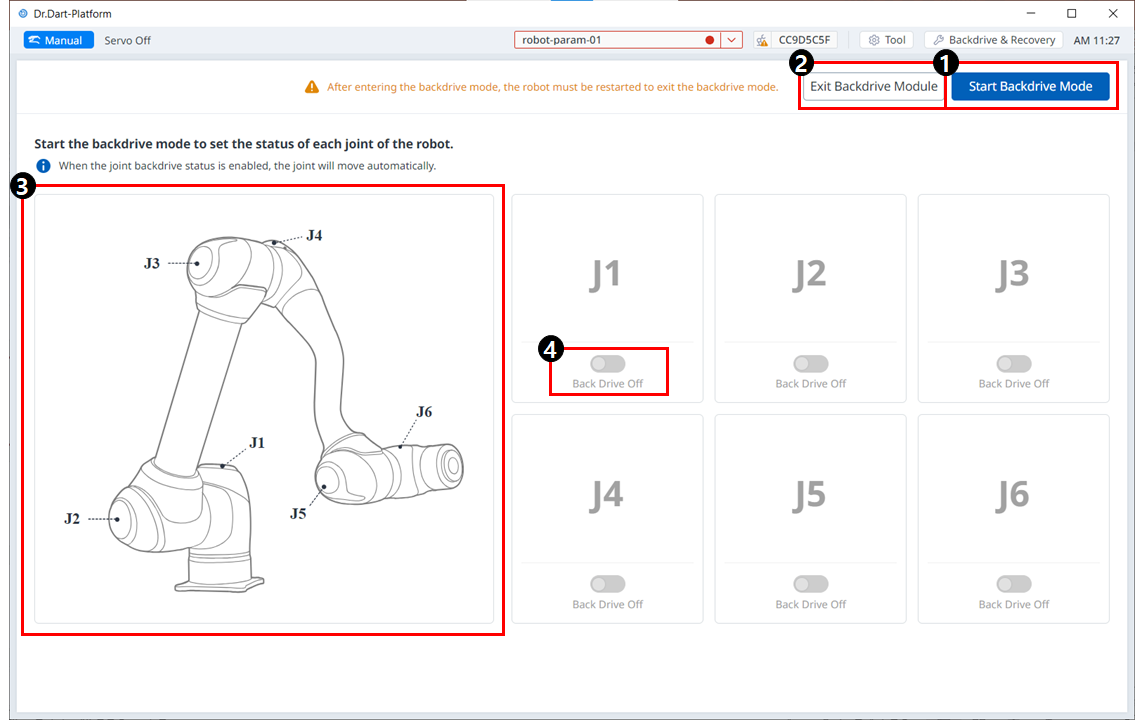
Pour accéder au module Backdrive, appuyez sur le bouton Backdrive situé en bas.
Menu
Éléments | Description | |
|---|---|---|
| 1 | Démarrez le mode Backdrive | Ce bouton vous permet d'exécuter le mode Backdrive. |
| 2 | Quittez Backdrive | Ce bouton vous permet de quitter le module Backdrive. |
| 3 | Image commune | Il s'agit d'une image qui décrit la position de chaque joint. |
| 4 | Bouton bascule Marche/Arrêt | Vous pouvez choisir de l'activer pour chaque joint. |
Le processus de réglage du mode de retour arrière est le suivant :
Appuyez sur le bouton Status du menu principal Backdrive .
Si le bouton Backdrive n’est pas activé, appuyer puis relâcher le bouton Emergency Stop ou appuyer sur le bouton Servo Off l’activera.
Lorsque le servo est activé , la fenêtre contextuelle suivante s'affiche et le servo est automatiquement désactivé.
Appuyez sur le bouton Start Backdrive mode sur l' écran Backdrive.
Le bouton OFF/ON est activé pour relâcher les freins de chaque articulation.

Réglez le frein de la liaison sur ARRÊT (relâchement) et déplacez le robot en appliquant une force.
En raison du rapport de décélération du décélérateur à l'intérieur de l'articulation, la vitesse d'affaissement de l'articulation due au poids du manipulateur n'est pas élevée, et la vitesse de mouvement lorsque la force est appliquée n'est pas non plus élevée.
Si le décélérateur fonctionne mal ou si les articulations se déplacent à une vitesse supérieure à une certaine vitesse pendant un mouvement de gravité nulle, les freins de toutes les articulations sont appliqués automatiquement pour assurer la sécurité.
Serrez le frein (Hold) lorsque le changement de position est terminé.
Appuyez sur l’option Power dans le menu principal pour arrêter le programme en cours d’exécution, maintenez le bouton d’alimentation en haut du boîtier d’apprentissage pour éteindre le système, puis appuyez à nouveau pour le rallumer.
Le statut Backdrive est libéré et le travail peut reprendre normalement.
Remarque
Replacez chaque joint dans la plage de travail normale individuellement dans l'ordre séquentiel.
Si le mode Backdrive est activé, le système doit être redémarré pour reprendre le travail normalement.
Veuillez noter qu’un affaissement temporaire peut survenir en fonction de la position de l’axe pendant le mode Backdrive.