Limite d'espace et Paramètres des zones
Commun
La surface efficace peut être sélectionnée comme intérieur ou extérieur.
Le type de forme peut être sélectionné comme sphère, cylindre, parallélépipède, parallélépipède incliné ou boîte multiplan. Pour plus d'informations, reportez-vous à la section Présentation des paramètres de limite d'espace et de zone.
Paramètre de limite d'espace
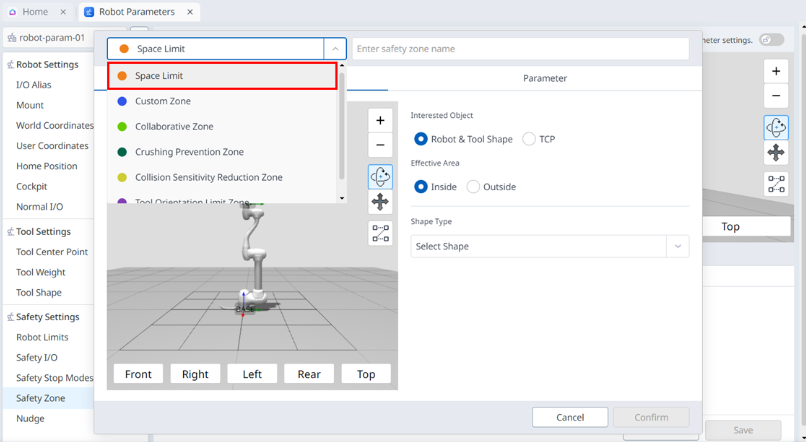
La limite d'espace est une fonction qui définit une clôture virtuelle dans la zone la plus à l'extérieur du robot. Vous pouvez utiliser le robot sans définir de limite d'espace, mais il est recommandé de définir une limite d'espace pour une utilisation en toute sécurité.
Vous pouvez la définir en sélectionnant « limite d'espace » dans Robot Parameters > zone de sécurité > Ajouter > en haut à gauche de la fenêtre contextuelle.
Il est possible de sélectionner l'une des formes robot et outil/TCP pour l'objet intéressé.
Le robot doit se trouver dans la zone de limite d'espace définie pour être réglé normalement.
Remarque
Selon la manière dont vous la définissez, la valeur par défaut de Space expansion existe.
Paramètre de forme de l'outil, lors de la sélection de 'TCP' pour inspection, valeur de marge TCP 0 mm
Réglage de la forme de l'outil, lors de la sélection de 'robot et forme de l'outil' pour l'inspection, valeur de marge TCP 0 mm
Forme de l'outil non définie, lors de la sélection de 'TCP' pour inspection, valeur de marge TCP 0 mm
Forme de l'outil non définie, lors de la sélection de 'forme du robot et de l'outil' pour inspection, valeur de marge TCP 60 mm
Réglage de la zone de collaboration
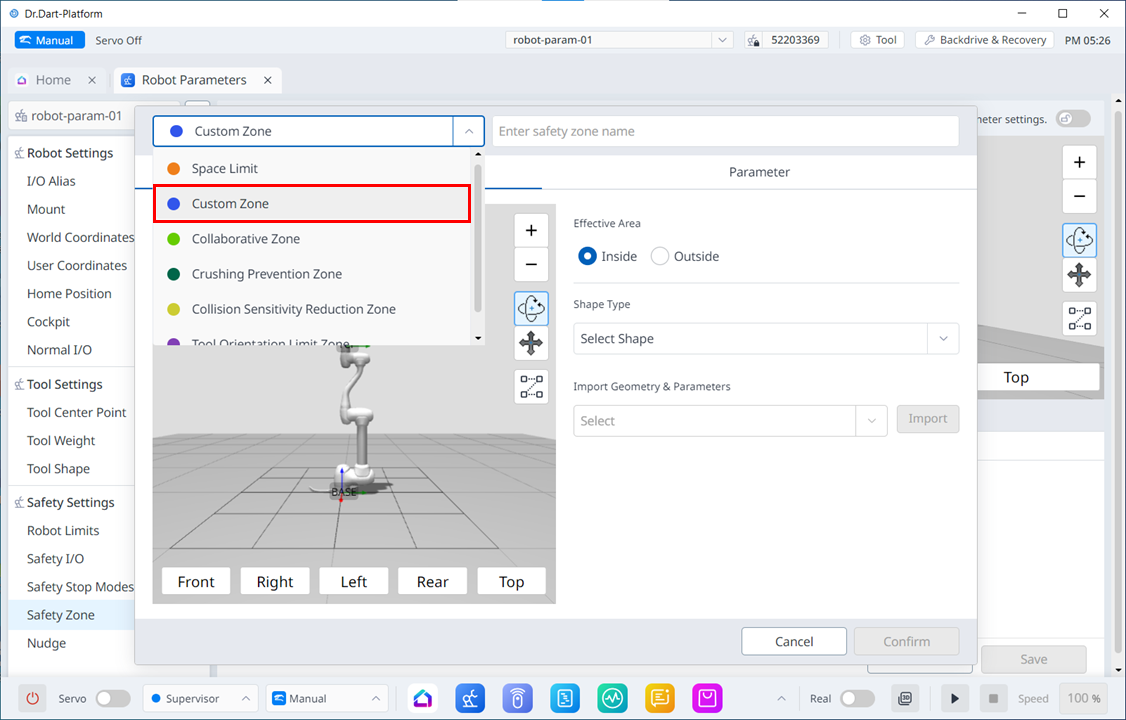
Custom zone est la zone de sécurité la plus flexible où vous pouvez définir librement les paramètres de sécurité. Vous pouvez configurer tous les paramètres tels que les limites du robot, le mode d'arrêt sécurisé, la vitesse de joint et les limites d'angle pour répondre à vos besoins.
Vous pouvez le définir en sélectionnant zone personnalisée dans Robot Parameters > zone de sécurité > Ajouter > fenêtre contextuelle en haut à gauche.
Remarque
Si TCP se trouve dans une position où plusieurs zones se chevauchent, les règles suivantes s'appliquent individuellement pour chaque fonction de sécurité.
Mode normal
Si aucune zone n’est définie comme high priority zones, la valeur limite de sécurité la plus restrictive des zones qui se chevauchent sera la valeur de référence pour l’inspection.
Si une zone est définie comme high priority zone, la valeur limite de cette zone est la valeur de référence d'inspection.
Si plus de deux zones sont définies comme high priority zones, la valeur limite de sécurité la plus souple des zones sera le critère d’inspection.
Mode de réduction
Si aucune zone n’est définie comme high priority zones, la valeur limite de sécurité la plus restrictive des zones qui se chevauchent sera la valeur de référence pour l’inspection.
Si une zone est définie comme une high priority zone, l’option de substitution pour cette zone détermine la valeur de référence pour l’inspection.
Si l’option de substitution n’est pas cochée, la valeur limite de sécurité la plus restrictive entre la high priority zone et la Global-Reduced Limit sera la valeur de référence pour l’inspection.
Si l’option de substitution est cochée, la high priority zone devient la valeur de référence pour la vérification.
Si plusieurs zones sont définies sur a high priority zone, l'option de remplacement pour cette zone détermine la valeur de référence d'inspection.
Si l' option outrepassement n'est pas cochée pour l'une des zones de priorité élevée, la zone de priorité la plus élevée pour laquelle l'option outrepassement n'est pas cochée et la valeur de limite de sécurité la plus limitée de la limite globale réduite sera la valeur de référence d'inspection.
Si l' option outrepasser pour toutes les zones de priorité élevée est cochée, la valeur limite de sécurité la plus assouplie parmi les zones de priorité élevée sera le critère d'inspection.
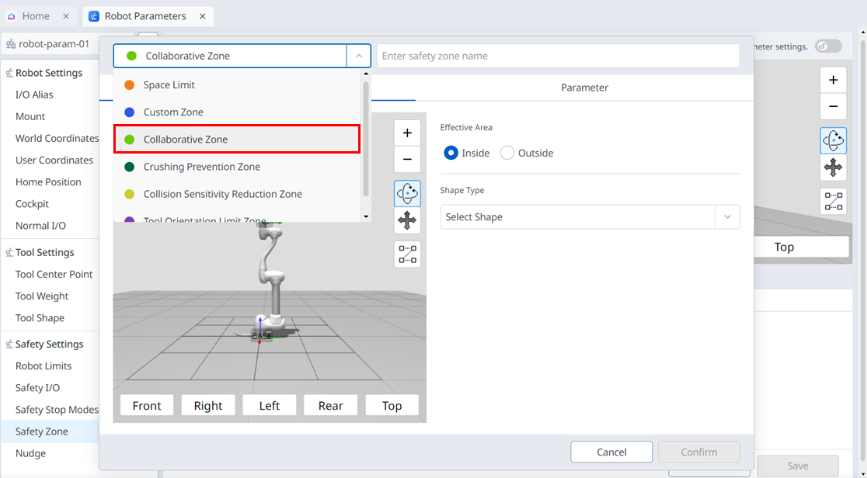
Réglage de la Collaborative Zone
La zone de collaboration est une zone conçue pour travailler en toute sécurité avec des robots. Il fournit les limites du robot telles que les taux de décélération requis pour le travail à courte distance et les paramètres du mode d'arrêt sécurisé.
Vous pouvez le définir en sélectionnant « zone de collaboration » dans Robot Parameters > zone de sécurité > Ajouter > fenêtre contextuelle en haut à gauche.
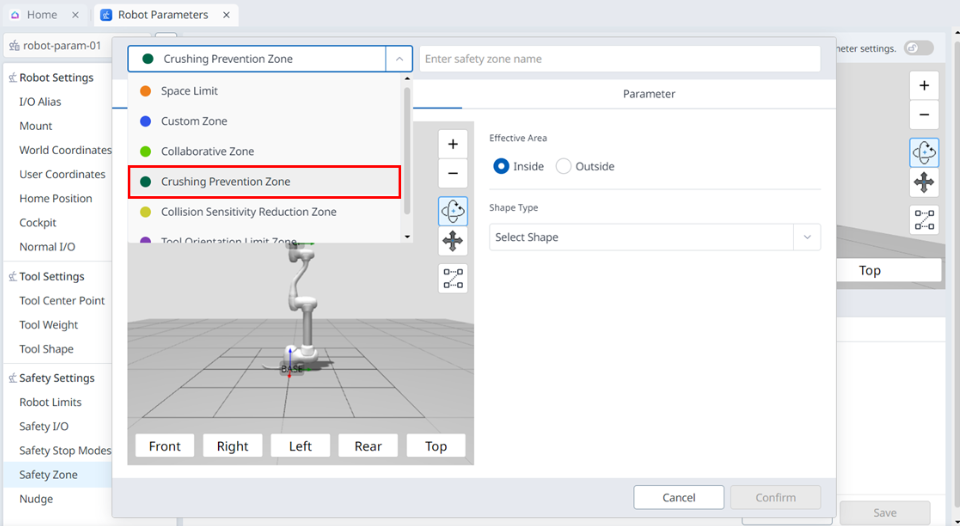
Réglage de la Crushing Prevention Zone
La zone de prévention de l'écrasement est une zone destinée à prévenir les risques d'écrasement qui peuvent se produire entre le robot et d'autres objets. Dans cette zone, lorsque la limite de collision et de force externe est violée, le mode d'arrêt de sécurité est fixé à RS1 (arrêt réflexe) et la sensibilité de collision est réglée à 100%, de sorte que lorsqu'une collision est détectée, le robot réagit aussi sensible que possible à la force externe et s'arrête en toute sécurité par réaction flottante.
Vous pouvez le définir en sélectionnant « zone de prévention de l'écrasement » dans Robot Parameters > zone de sécurité > Ajouter > fenêtre contextuelle en haut à gauche.
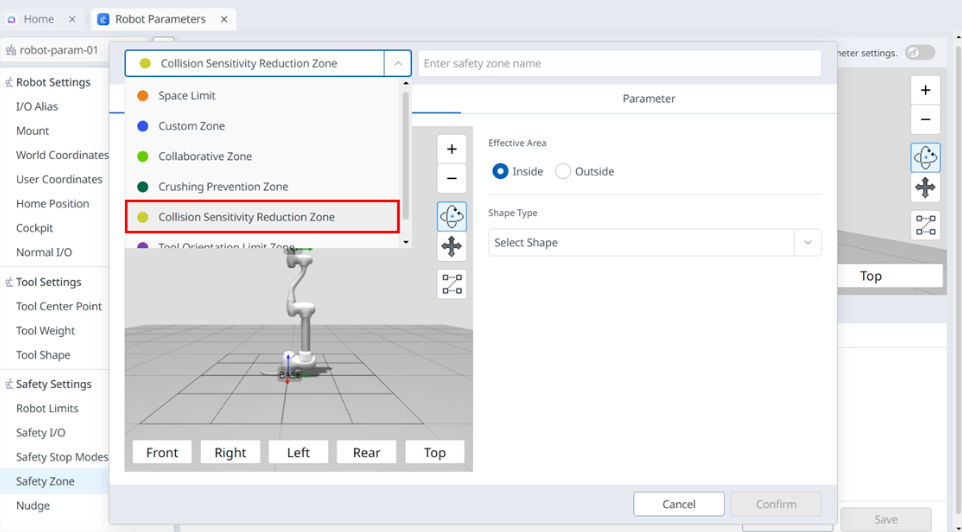
Réglage de la Collision Sensitivity Reduction Zone
La zone de réduction de la sensibilité de collision est une zone qui ajuste la sensibilité de détection de collision du robot lorsque vous travaillez avec différents matériaux ou surfaces. Il fournit des réglages de force et de sensibilité aux collisions.
Vous pouvez le définir en sélectionnant zone de réduction de la sensibilité aux collisions dans Robot Parameters > zone de sécurité > Ajouter > en haut à gauche de la fenêtre contextuelle.
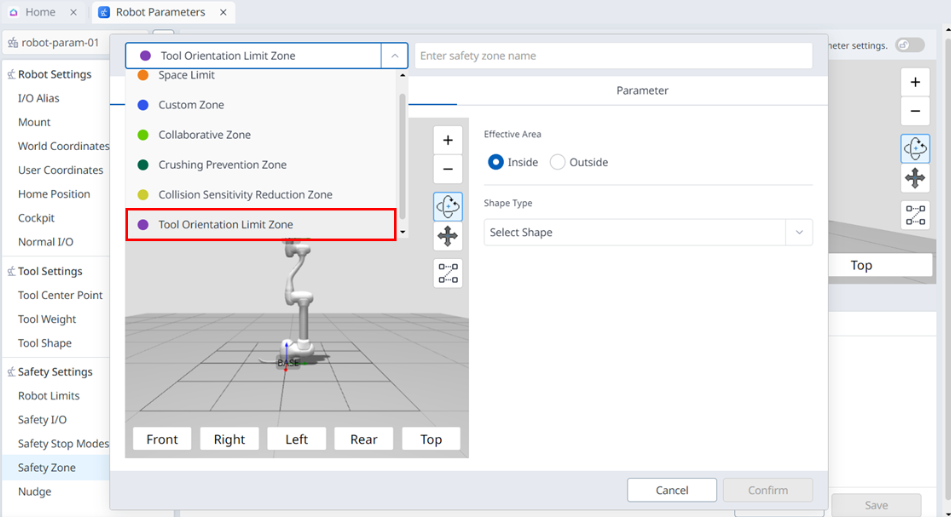
Réglage de la zone limite d'orientation de l'outil
La zone limite d'orientation de l'outil est une zone qui limite l'orientation du TCP. Il garantit que le TCP fait face à une direction spécifique et l'empêche de faire face à une direction dangereuse en définissant la direction et la marge d'angle.
Vous pouvez la définir en sélectionnant zone limite d'orientation de l'outil dans Robot Parameters > zone de sécurité > Ajouter > en haut à gauche de la fenêtre contextuelle.