
Méthodes et conditions de mesure
La distance d'arrêt correspond au déplacement angulaire à partir du moment où un signal d'arrêt est généré jusqu'au moment où tous les manipulateurs arrêtent le fonctionnement.
Le temps d'arrêt correspond au temps qui s'écoule entre le moment où un signal d'arrêt est généré et le moment où tous les manipulateurs arrêtent le fonctionnement.
Les données de distance d'arrêt et de temps d'arrêt sont fournies pour l'articulation 1, l'articulation 2 et l'articulation 3 dont les distances de déplacement sont longues.
Le mouvement d'un axe de chevauchement peut provoquer une distance d'arrêt plus longue.
Les données de distance d'arrêt et de temps d'arrêt sont définies conformément à KS B ISO 10218-1:2011 Déclaration et certification.
Catégorie d'arrêt
Catégorie d'arrêt | Description | |
|---|---|---|
| 1 | Catégorie d'arrêt 0 | La distance d'arrêt et le temps d'arrêt du joint 1 (base), du joint 2 (épaule) et du joint 3 (coude) sont mesurés à la vitesse maximale, au niveau d'étirement et à la charge maximale. Les axes du joint 2 et du joint 3 sont parallèles l'un à l'autre, de sorte qu'un impact causé par une butée forcée sur une pièce peut provoquer un glissement de l'autre côté. La déviation angulaire est également mesurée. |
| 2 | Catégorie d'arrêt 1 | La distance d'arrêt et le temps d'arrêt du joint 1 (base) et du joint 2 (épaule) sont mesurés respectivement à 33 %, 66 % et 100 % de la vitesse maximale, du niveau d'étirement et de la charge maximale. La distance d'arrêt et le temps d'arrêt du joint 3 (coude) sont mesurés à 33 %, 66 % et 100 % de la vitesse et de la charge maximales. Le niveau d'étirement pendant la mesure de joint 3 est verrouillé au maximum en raison de la longueur du bras inférieur et du poignet complètement plat. |
Positions et conditions de mesure
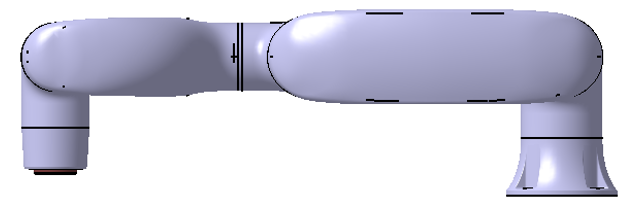
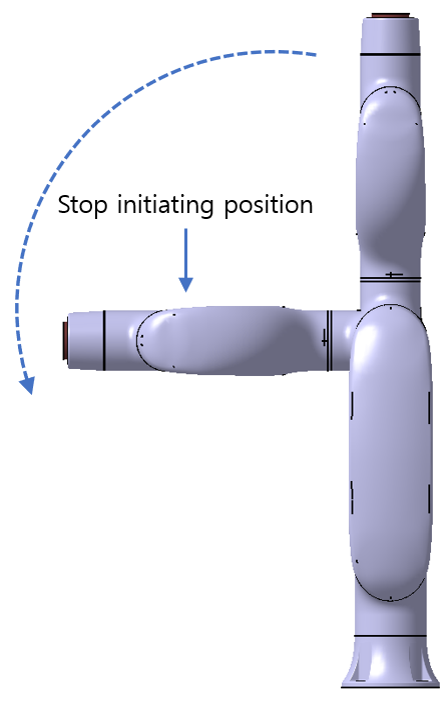
La mesure de l'articulation 1 est effectuée avec l'axe de rotation perpendiculaire au sol et pendant le mouvement horizontal.
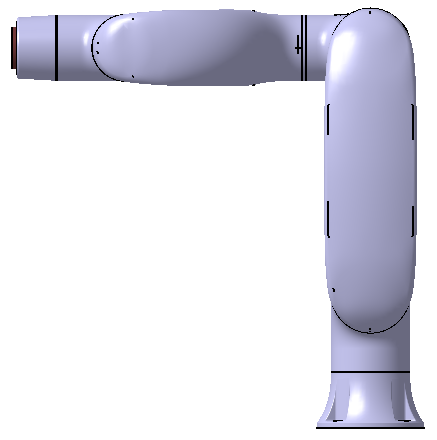
Les mesures de l'articulation 2 et de l'articulation 3 sont effectuées avec l'axe de rotation parallèle au sol et lorsque le robot est arrêté au cours d'un mouvement descendant en position verticale par rapport au sol.
Remarque
Le pire des scénarios a été pris en compte pour établir les mesures. Les mesures peuvent varier selon les circonstances
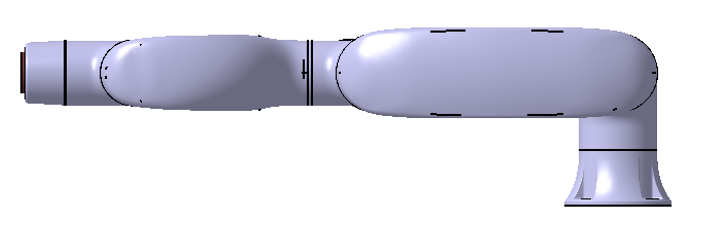
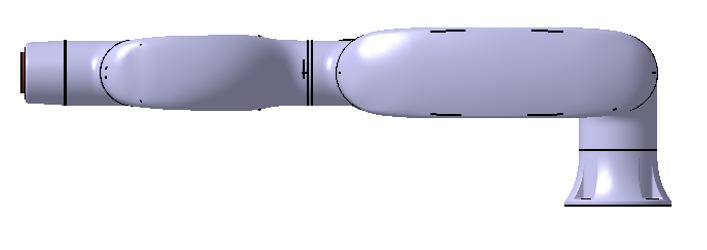
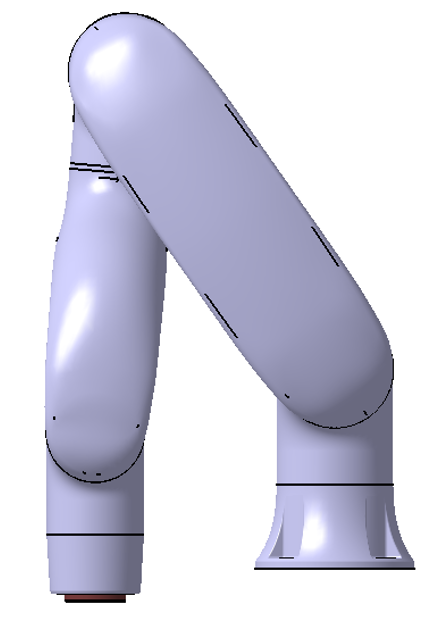
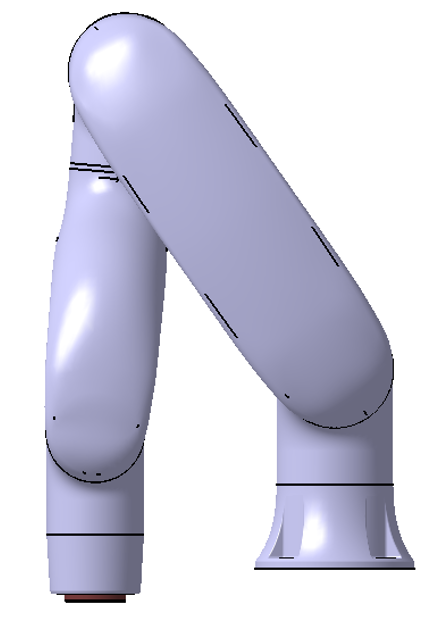
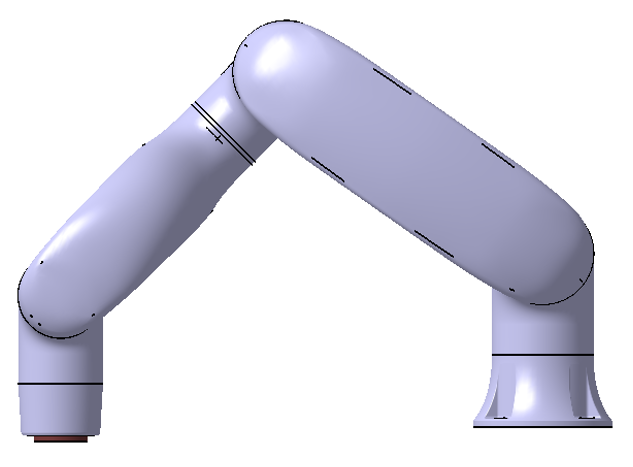
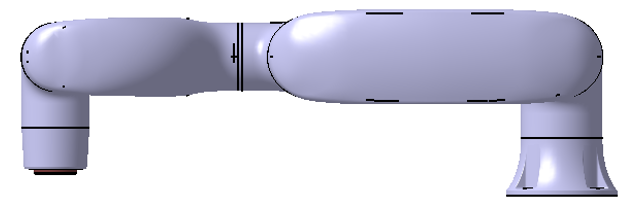
La pose pour 33%, 66% et 100% de l'extension
| Joint 1 | Joint 2 | Joint 3 |
extension de 100 % Catégorie d'arrêt 0 |
 |
 |
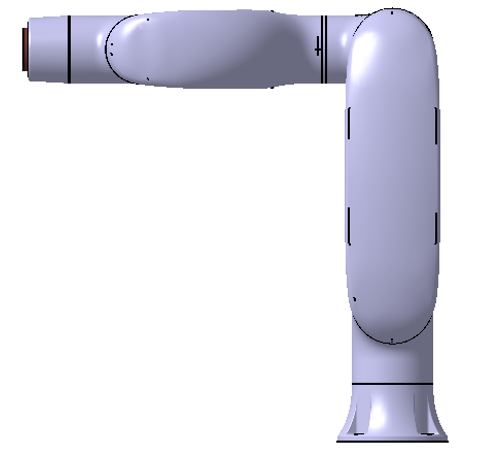 |
extension de 33 % Catégorie d'arrêt 1 |
 |
 |
- |
extension de 66 % Catégorie d'arrêt 1 |
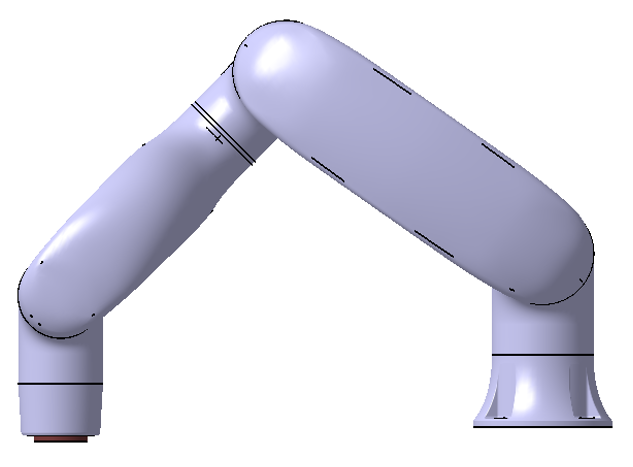 |
 |
- |
extension de 100 % Catégorie d'arrêt 1 |
 |
 |
 |
La pose lorsque l'arrêt est déclenché et l'angle mesuré (θd)
Pose lorsque l'arrêt est déclenché | Angle mesuré | |
Joint1 |
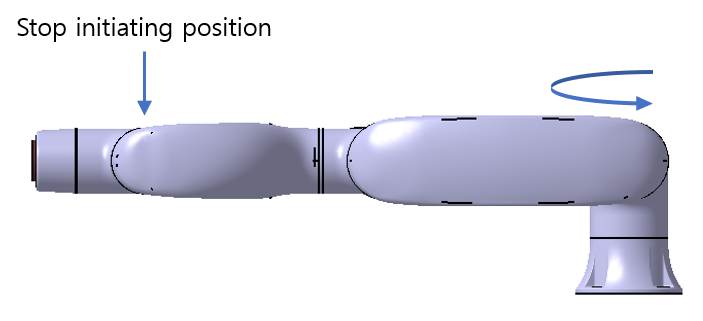 | Pas de glissement,
|
Joint2 |
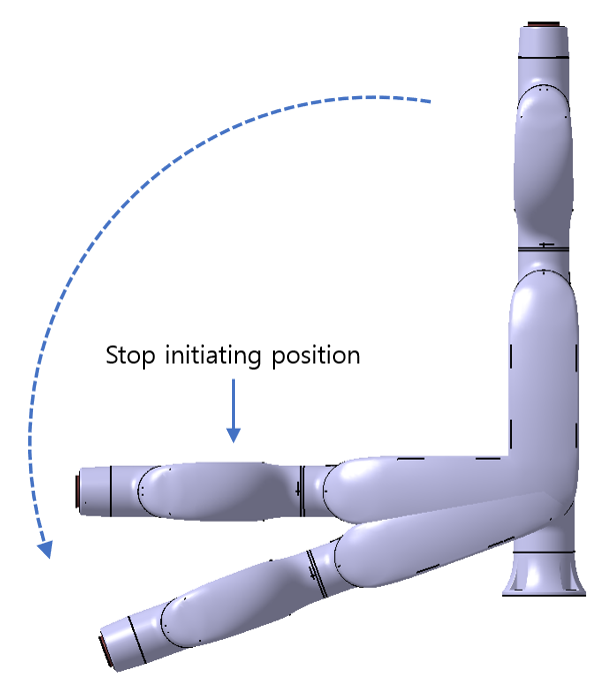 |
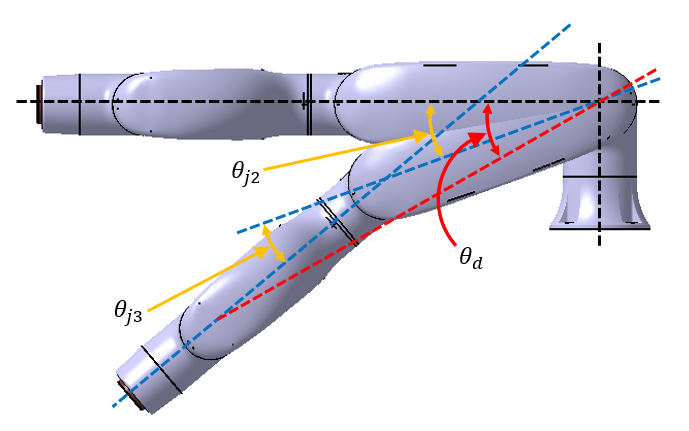 |
Joint3 |
 |
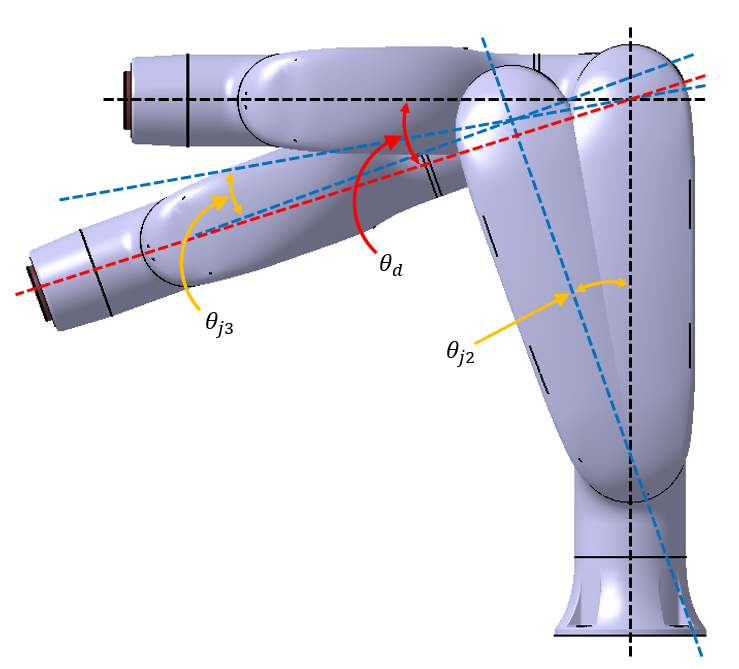 |