Connexion de périphériques externes
Connexion de périphériques externes - capteur de vision
Le robot peut être connecté à un capteur de vision (caméra 2D pour la mesure de la position de l'objet), et les mesures du capteur de vision peuvent être transférées au robot via un réseau pour être reliées aux commandes du robot.
Réglage du capteur de vision
Paramètre de connexion de communication
Connectez les ports LAN des périphériques et appliquez la communication TCP/IP pour transférer les mesures du capteur de vision au robot. (Voir connexion réseau ) définissez l'adresse IP du capteur de vision sur bande TCP/IP 192.168.137.xxx pour permettre la communication TCP/IP.
Paramètres de travail de vision
Pour effectuer une mesure de la position d'un objet, il est nécessaire d'avoir une entrée d'image et un apprentissage de la vision de l'objet cible à l'aide du capteur de vision. Reportez-vous au programme de réglage de travail de vision dédié fourni par le fabricant du capteur de vision.
Paramètre format des données de mesure
Pour utiliser les données de mesure du capteur de vision dans le travail du robot, il est nécessaire d'effectuer un étalonnage des coordonnées vision-robot, et ceci doit être effectué avant de commencer le travail à l'aide du programme de réglage du capteur de vision. Les données de mesure du capteur de vision doivent être transférées à l'aide des paramètres de format suivants :
Format | pos | , | x | , | y | , | angle | , | var1 | , | var2 | , | … |
|---|
pos : Séparateur indiquant le début des données de mesure (préfixe)
x : Valeur de coordonnée X de l'objet mesurée à l'aide du capteur de vision
y : Valeur de coordonnée y de l'objet mesurée à l'aide du capteur de vision
angle : Valeur de l'angle de rotation de l'objet mesurée à l'aide du capteur de vision
Var1 … Varn : Informations mesurées à l'aide d'un capteur de vision (par exemple, dimension de l'objet / valeur de vérification des défauts), exemple) pos,254,5,-38,1,45.3,1,50.1 (description : x=254,5, y=-38,1, angle=145,3, var1=1, var2=50,1)
Réglage du programme robot
Lorsque la connexion physique de communication entre le capteur de vision et le robot et le réglage du capteur de vision sont terminés, un programme doit être défini pour permettre la liaison entre le capteur de vision et le programme du robot. Il est possible de connecter/communiquer/contrôler les fonctions du capteur de vision externe en utilisant Doosan robot Language (DRL), et il est possible de configurer le programme dans le Task Writer.
Des détails et des exemples complets de Doosan robot Language (DRL) sur les fonctions du capteur de vision externe sont fournis dans le manuel de programmation.
Connexion d'un périphérique externe – DART Platform
La plate-forme DART est un logiciel qui s'exécute sur un ordinateur de bureau ou portable Windows. Une fois que le contrôleur et le bureau/ordinateur portable sont connectés via le port LAN, toutes les fonctions du boîtier d'apprentissage sont disponibles dès que la DART Platform est exécutée. À ce stade, la procédure de configuration suivante est requise pour se connecter aux sous-contrôleurs du contrôleur.
Recherche d'adresse IP et paramètre de connexion
Paramètre de connexion de communication
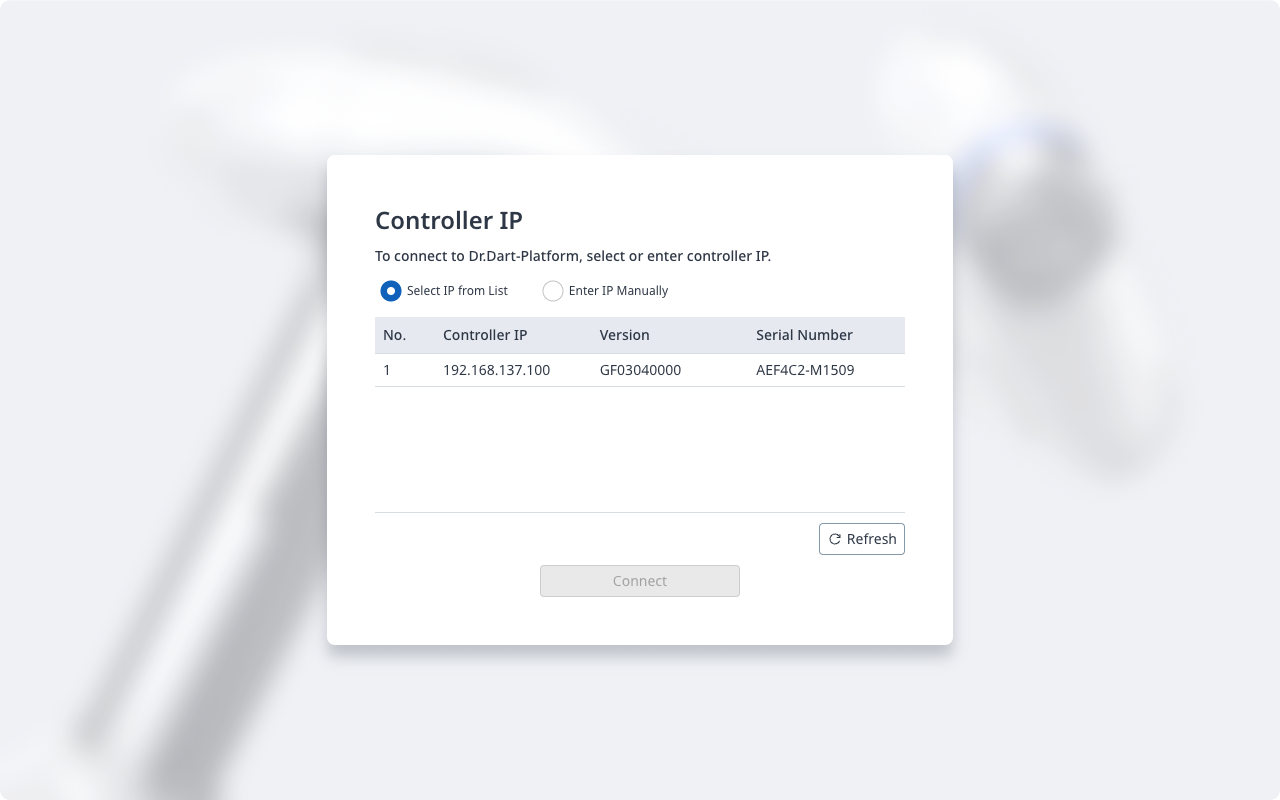
Lorsque la plate-forme DART est exécutée après la connexion de l'ordinateur portable au port LAN du contrôleur, l'adresse IP du contrôleur, les informations de version du sous-contrôleur et le numéro de série du robot requis pour établir une connexion sont automatiquement recherchés.
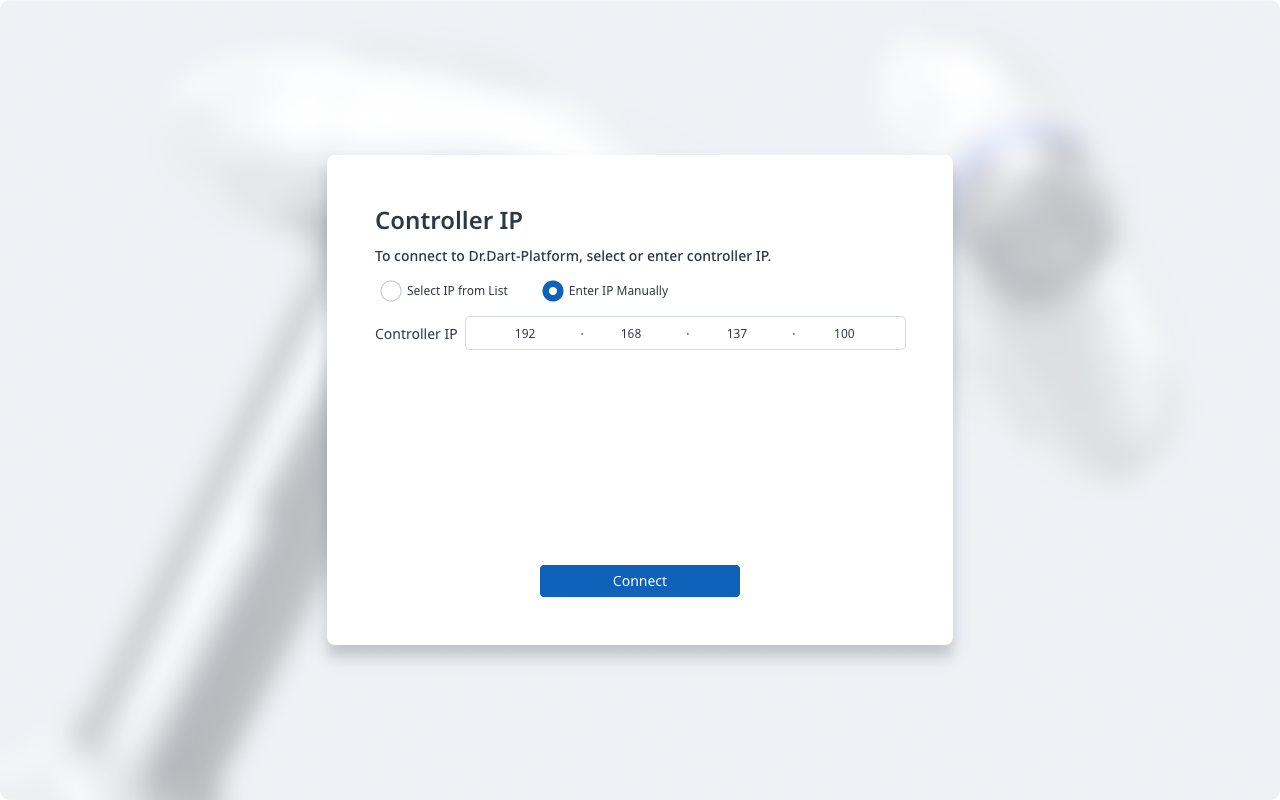
Si la recherche échoue, appuyez sur le bouton Actualiser pour actualiser ou appuyez sur saisir l'adresse IP manuellement pour saisir manuellement l'adresse IP du contrôleur.
Sélectionner le numéro de série du robot à connecter et appuyer sur le bouton Connect établit une connexion entre la plate-forme DART et le sous-contrôleur et permet au robot de fonctionner normalement.
En cas de problème de connexion, essayez la procédure ci-dessous, mais si ce problème persiste, contactez le personnel des ventes ou du service après-vente pour obtenir de l'aide.
Si les résultats de la recherche pour l'adresse IP du contrôleur connectable, les informations de version du sous-contrôleur et le numéro de série du robot ne sont pas affichés : Appuyez sur le bouton Actualiser pour effectuer une nouvelle recherche et essayer de vous connecter à nouveau en suivant la procédure ci-dessus.
Ensuite, si vous voyez la page transférer le contrôle comme indiqué ci-dessous, appuyez sur le bouton retrait forcé pour tenter de vous connecter à la plateforme.