
E/S de bride
Le capot de la bride d'extrémité du robot est doté d'un connecteur à 8 broches M8, et se reporter à la figure ci-dessous pour connaître son emplacement et sa forme.
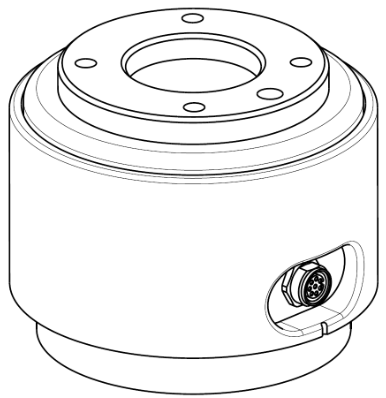
Le connecteur fournit l'alimentation et les signaux de commande nécessaires au fonctionnement de la pince ou des capteurs intégrés dans des outils robotiques spécifiques. Voici des exemples de câbles industriels (des câbles équivalents peuvent être utilisés) :
Phoenix contact 1404178, mâle (droit)
Phoenix contact 1404182, mâle (angle droit)
Schéma de principe
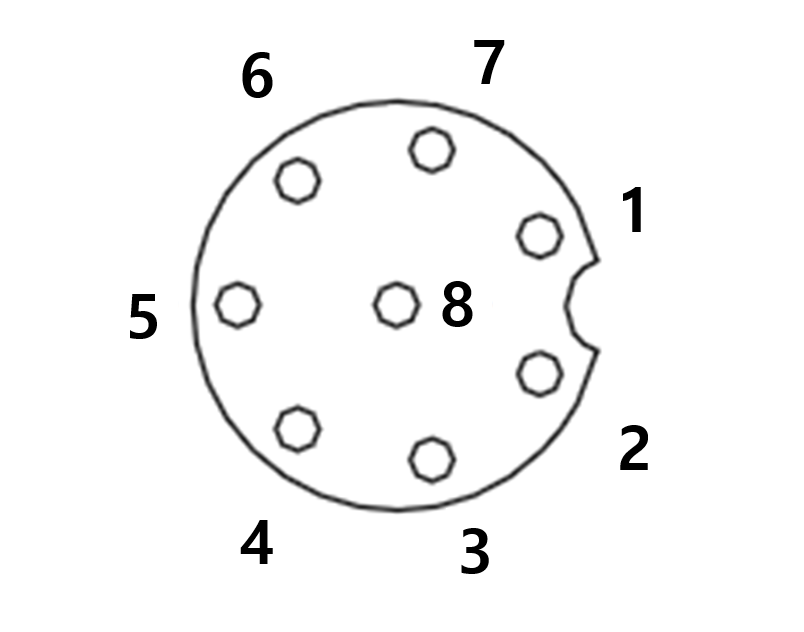
Le schéma des broches de chaque connecteur est le suivant :
Veuillez vous reporter au tableau ci-dessous pour la configuration détaillée des E/S fournie par le connecteur X1.
Réglage X1
No. | Type de signal | Description |
|---|---|---|
1 | Entrée numérique 1 | PNP (type de source, par défaut) |
2 | Sortie numérique 1 | Réglé sur PNP (type de source, par défaut) ou NPN (type de récepteur) |
3 | Sortie numérique 2 | Réglé sur PNP (type de source, par défaut) ou NPN (type de récepteur) |
4 | Entrée analogique 1 / RS-485 + | Réglez sur tension (0-10 V) ou courant (4-20 mA, par défaut) / vitesse de transmission max. 1M en bauds |
5 | Alimentation | Réglez l'alimentation interne sur +24 V (par défaut), +12 V ou 0 V. |
6 | Entrée analogique 2 / RS-485 - | Réglez sur tension (0-10 V) ou courant (4-20 mA, par défaut) / vitesse de transmission max. 1M en bauds |
7 | Entrée numérique 2 | PNP (type de source, par défaut) |
8 | GND |
La puissance initiale d'entrée/sortie (E/S) de la bride est réglée sur 24 V et peut être réglée sur 0 V ou 12 V.
Reportez-vous au tableau ci-dessous pour obtenir des spécifications d'alimentation détaillées lors de la connexion d'E/S.
Paramètre | Min | Type | Max | Unité |
|---|---|---|---|---|
Tension d'alimentation (mode 12 V) | 11,4 | 12 | 12,6 | V |
Tension d'alimentation (mode 24 V) | 22,8 | 24 | 25,2 | V |
Courant d'alimentation | - | - | 1,5 | A |
Avertissement
Installer l'outil et la pince de manière à ce qu'ils ne causent aucun danger lorsque l'alimentation est coupée.
(par ex., pièce tombant de l'outil)La borne no 5 de chaque connecteur fournit une tension de 24 V en permanence lorsque le robot est alimenté. Veillez donc à couper l'alimentation du robot lors de la configuration de l'outil et de la pince.
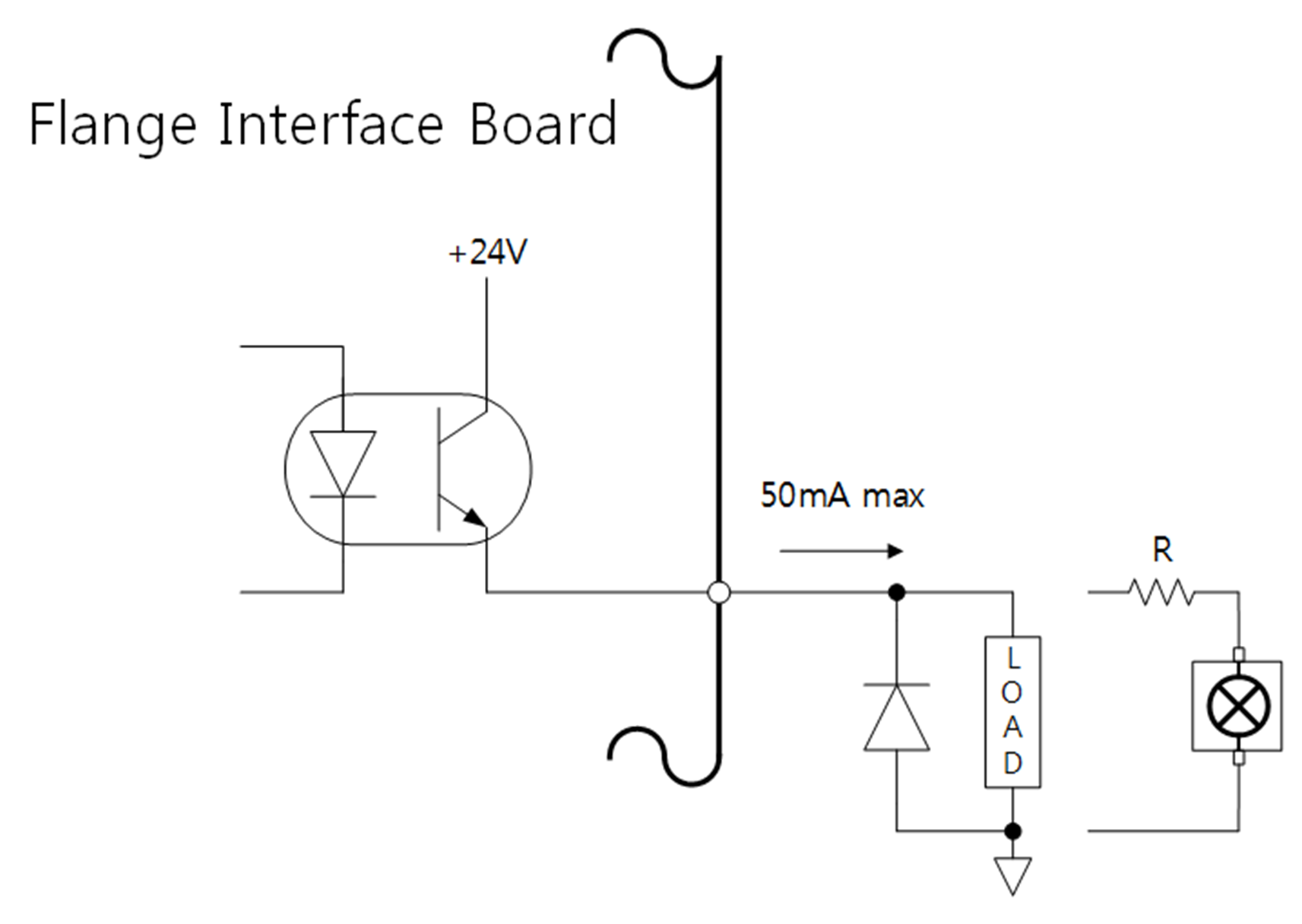
Spécifications de sortie numérique de bride
La sortie numérique de bride est une spécification PNP, et la sortie du photocoupleur est configurée dans la sortie.
Le canal de sortie correspondant devient +24V lorsque la sortie numérique est activée. Lorsque la sortie numérique est désactivée, l'état du canal de sortie correspondant est ouvert (flottant).
Les caractéristiques électriques de la sortie numérique sont les suivantes :
Paramètre | Min | Type | Max | Unité |
|---|---|---|---|---|
Tension lors de la conduite 10 mA | 23 | - | - | V |
Tension lors de la conduite 50 mA | 22,8 | - | 23,7 | V |
Courant pendant la conduite | 0 | - | 50 | Ma |
Le paramètre a été modifié comme suit depuis le 11 avril 2024
Les sorties ou numériques prennent en charge deux modes différents :
Mode | Actif | Inactif |
|---|---|---|
PNP (type de source, par défaut) | Élevé | Ouvrir |
NPN (type d'évier) | Faible | Ouvrir |
La puissance initiale d'entrée/sortie (E/S) de la bride est réglée sur 24 V et peut être réglée sur 0 V ou 12 V.
Le canal de sortie correspondant devient ++12V ou ++24V lorsque la sortie numérique est activée.
Lorsque la sortie numérique est désactivée, l'état du canal de sortie correspondant est ouvert (flottant).
Les caractéristiques électriques de la sortie numérique sont les suivantes :
Paramètre | Min | Type | Max | Unité |
|---|---|---|---|---|
Tension lors de la conduite en mode 12 V. | 11,4 | 12 | 12,6 | V |
Tension lors de la conduite en mode 24 V. | 22,8 | 24 | 25,2 | V |
Courant pendant la conduite | 0 | - | 50 | Ma |
Attention
La sortie numérique n'est pas soumise à une limitation de courant. Le non-respect des spécifications présentées ci-dessus pendant le fonctionnement peut endommager définitivement le produit.
La figure ci-dessous est un exemple de configuration de sortie numérique. Reportez-vous donc à celle-ci lors du raccordement de l'outil et de la pince.
Assurez-vous de débrancher l'alimentation du robot lors de la configuration du circuit.
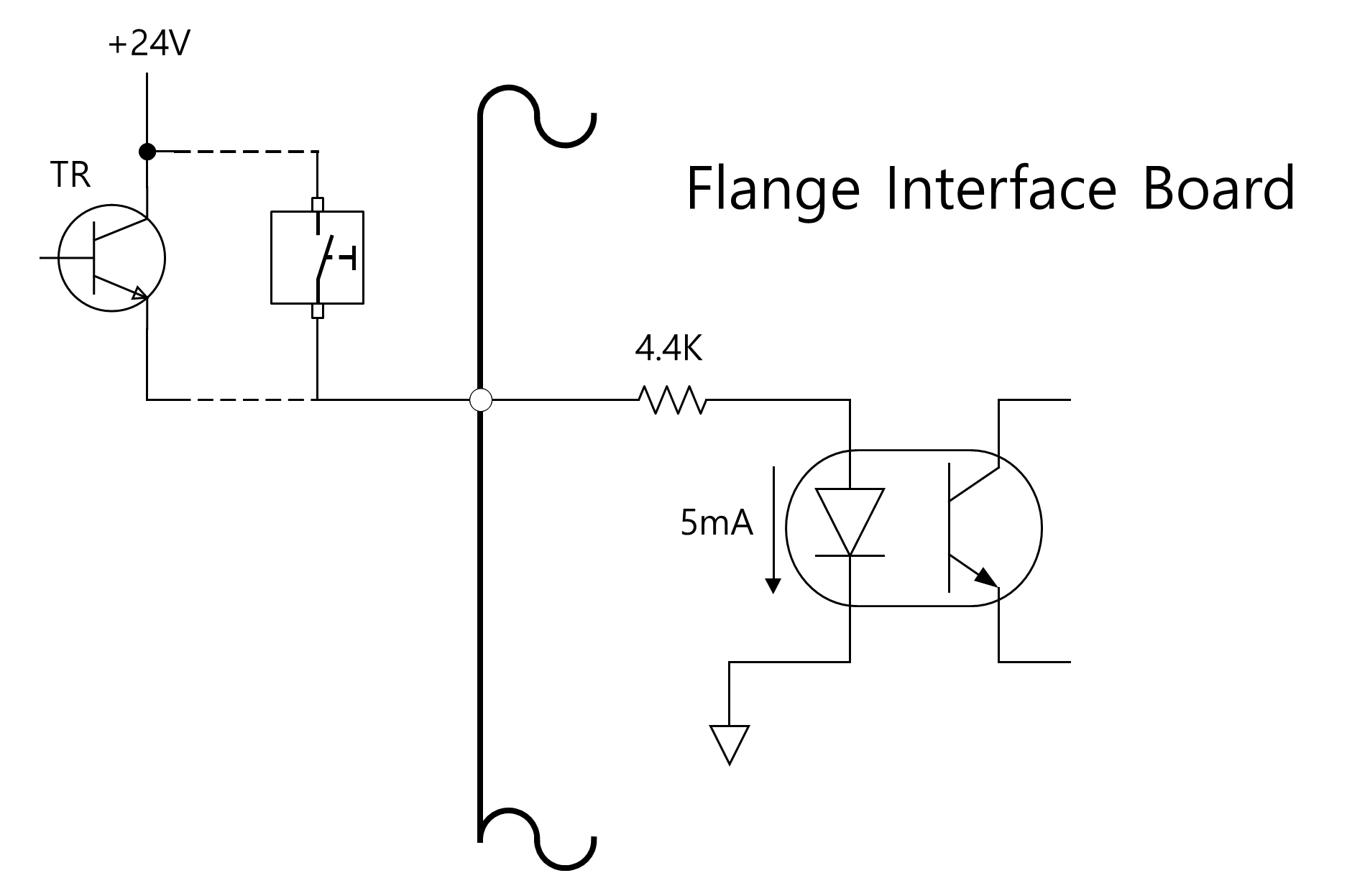
Spécifications de l'entrée numérique de bride
L'entrée numérique de la bride est dotée d'une entrée de photocoupleur.
Le courant basé sur l'entrée 24V est limité à 5mA par la résistance interne.
Les caractéristiques électriques de l'entrée numérique sont les suivantes :
Paramètre | Min | Type | Max | Unité |
|---|---|---|---|---|
Tension d'entrée | 0 | - | 26 | V |
Logique haute | 4,4 | - | - | V |
Logique basse | 0 | - | 0,7 | V |
Résistance d'entrée | - | 4.4k | - | Ω |
Attention
La figure ci-dessous est un exemple de configuration d'une entrée numérique. Consultez-la lorsque vous connectez un périphérique d'entrée.
Assurez-vous de débrancher l'alimentation du robot lors de la configuration du circuit.
Spécifications des entrées analogiques de bride
Reçoit les signaux de tension ou de courant des périphériques externes.
L'entrée analogique peut être réglée sur tension (0-10 V) ou courant (4-20 mA).
The electrical specifications are shown below.
Paramètre | Min | Type | Max | Unité |
|---|---|---|---|---|
Tension d'entrée en mode tension | 0 | - | 10 | V |
Courant d'entrée en mode courant | 4 | - | 20 | Ma |
Résolution | - | 12 | - | bit |