Qu'est-ce qu'un robot ?
Limites fonctionnelles de chaque série de robots
Les différentes séries de robots (séries A, AS, E, M/H, P) limitent l'utilisation des fonctions comme suit :
Basé sur le courant : Le courant du moteur situé sur chaque joint est utilisé.
Basé sur FTS : Un FTS (capteur de couple de force) situé à l'extrémité du robot est utilisé.
Basé sur JTS : JTS (capteur de couple de joint) situé sur chaque joint est utilisé.
Fontionalités | Série A/E (basée sur le courant) | A Series S (courant, basé sur FTS) | Série M (basée sur JTS) | Série H (basée sur JTS) | Série P (basée sur JTS) |
|---|---|---|---|---|---|
Enseignement direct
| O | O (Basé sur le courant) | O | O | O |
Enseignement direct
| X | O (Basé sur FTS) | O | O | O |
Détection de collision | O | O (Basé sur le courant) | O | O | O |
Mesure de la pose de l'installation | X | O (Basé sur FTS) | O | X (le robot ne peut être installé que sur le sol) | X (le robot ne peut être installé que sur le sol) |
Mesure du poids de l’outil (Weight Measurement) | X | O (Basé sur FTS) | O | O | O |
Mesure du poids de la pièce (Weight Measurement) | X | O (Basé sur FTS) | O | O | O |
Fonction de Nudge | X | X | O | O | O |
Contrôle de Force | O (paramètre disponible uniquement dans trois directions de translation, à l'exclusion de la rotation) | O (Basé sur FTS) | O | O | O |
Contrôle de Compliance | O (paramètre disponible uniquement dans trois directions de translation, à l'exclusion de la rotation) | O (Basé sur FTS) | O | O | O |
Limites fonctionnelles de la surveillance de la force pour chaque série de robots
Le boîtier d’apprentissage et DART-Studio peuvent être utilisés pour surveiller les données de force. La commande DRL (check_force_condition()) peut également être utilisée pour surveiller les données de force en externe.
Si le mode palettisation est réglé sur “ON” : Les mêmes fonctions de contrôle/surveillance que celles fournies à l'état OFF sont disponibles, sauf pour les robots des séries H et P.
Fontionalités | Série A/E (basée sur le courant) | Une série S (basée sur le courant et sur le FTS) | Série M (basée sur JTS) | Série H (basée sur JTS) | Série P (basée sur JTS) |
|---|---|---|---|---|---|
Contrôle de la force | O (paramètre disponible uniquement dans trois directions de translation, à l'exclusion de la rotation) | O (Basé sur FTS) | O | O | O |
O (Si le mode palettisation est réglé sur “ON” : Sortie de contrôle de force limitée (base Rx, orientation Ry) 1)) | O (Si le mode palettisation est réglé sur “ON” : Sortie de contrôle de force limitée (base Rx, orientation Ry) 1)) | ||||
Contrôle de Compliance | O (paramètre disponible uniquement dans trois directions de translation, à l'exclusion de la rotation) | O (Basé sur FTS) | O | O | O |
O (Si le mode palettisation est réglé sur “ON” : Sortie de contrôle de Compliance limitée (base Rx, orientation Ry) 1)) | O (Si le mode palettisation est réglé sur “ON” : Sortie de contrôle de Compliance limitée (base Rx, orientation Ry) 1)) | ||||
Forcer la surveillance (Boîtier d'apprentissage) | X | O (Basé sur FTS) | O (valeur de force de “0” affichée pour la section singularité) | O (valeur de force de “0” affichée pour la section singularité) | O (valeur de force de “0” affichée pour la section singularité) |
O (Si le mode palettisation est réglé sur “ON” : 4 degrés de liberté prévus pour la base (x, y, z, Rz)) | O (Si le mode palettisation est réglé sur “ON” : 4 degrés de liberté prévus pour la base (x, y, z, Rz)) | ||||
Forcer la surveillance (DART-Studio) | O (valeur de force de “0” affichée pour la section singularité) | O (Basé sur FTS) | O (valeur de force de “0” affichée pour la section singularité) | O (valeur de force de “0” affichée pour la section singularité) | O (valeur de force de “0” affichée pour la section singularité) |
O (Si le mode palettisation est réglé sur “ON” : 4 degrés de liberté prévus pour la base (x, y, z, Rz)) | O (Si le mode palettisation est réglé sur “ON” : 4 degrés de liberté prévus pour la base (x, y, z, Rz)) | ||||
Forcer la surveillance (Lors de l'utilisation des commandes DRL : | O (valeur de force de “0” affichée pour la section singularité) | O (Basé sur FTS) | O (valeur de force de “0” affichée pour la section singularité) | O (valeur de force de “0” affichée pour la section singularité) | O (valeur de force de “0” affichée pour la section singularité) |
O (Si le mode palettisation est réglé sur “ON” : 4 degrés de liberté prévus pour la base (x, y, z, Rz)) | O (Si le mode palettisation est réglé sur “ON” : 4 degrés de liberté prévus pour la base (x, y, z, Rz)) |
Limite de sortie de contrôle (orientation Base Rx, Ry) : Les valeurs de contrôle de force ou de compliance correspondant aux valeurs de contrôle de force ou de compliance correspondant à l'orientation base Rx, Ry ne sont pas sorties. La saisie de la valeur de contrôle de force ou de conformité de l’axe concerné (base Rx, Ry) sera ignorée comme “0”.
Présentation de Singularity
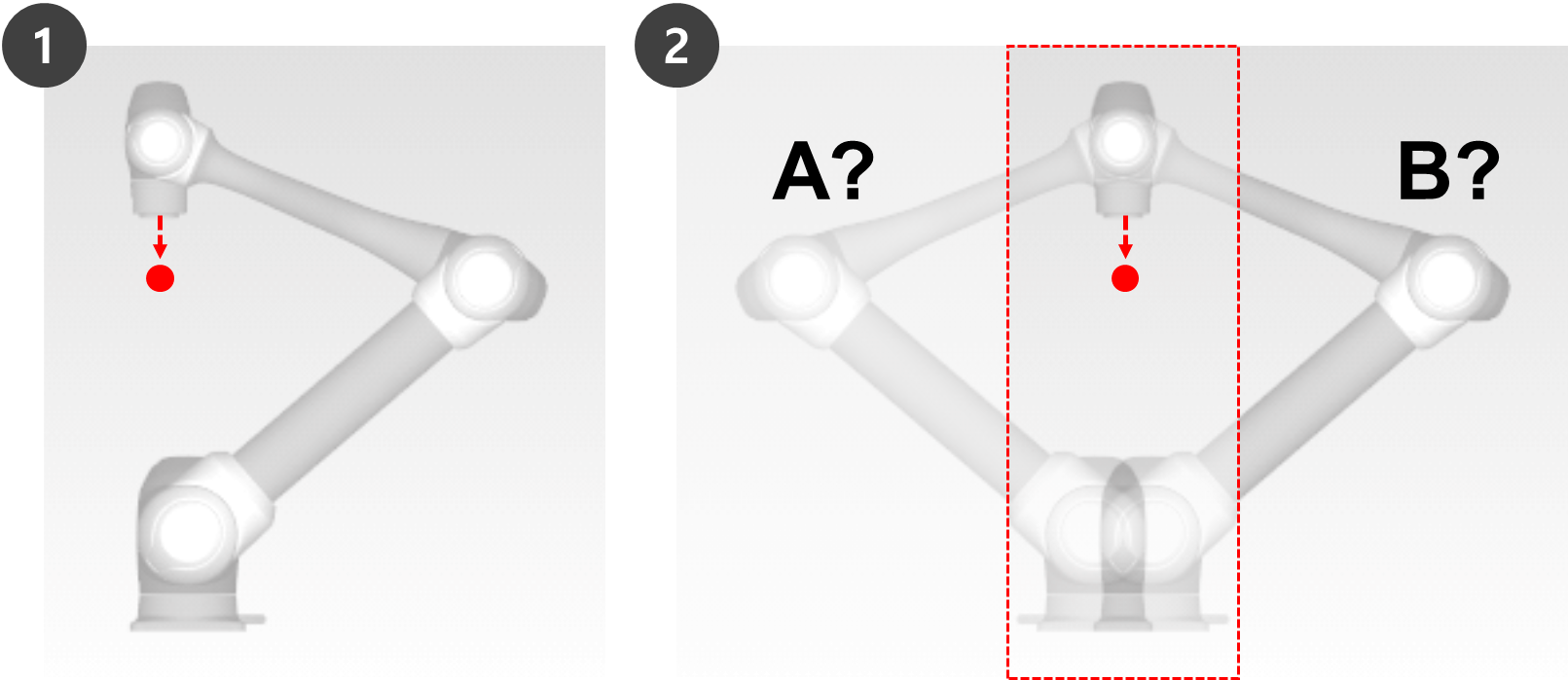
La singularité dans un robot à articulations multiples fait référence à une position (ou point dans un robot à articulations multiples fait référence à une position (ou point) où le robot a des difficultés à calculer sa prochaine pose pendant le déplacement. Les robots multi-articulations calculent chaque angle d'articulation pendant le mouvement en fonction de l'extrémité du robot.
Par exemple, sur la Fig. 1 ci-dessous, lorsque le robot se déplace vers le point rouge, le robot ne pourra pas déterminer s'il doit déplacer ses articulations pour fixer la pose A ou la pose B comme le montre la Fig. 2. Cette position (ou point) est appelée singularité.
Près d'une singularité, le mouvement du robot n'est pas fluide en termes de plan, de point et de ligne, le mouvement linéaire de fin de robot peut ne pas être maintenu et l'erreur de position pendant le contrôle peut augmenter. La singularité se produit dans 3 cas, comme le montre la figure suivante, y compris lorsque les articulations du robot forment une ligne.

Singularité du Wrist (poignet) : Lorsque le poignet du robot forme une ligne lorsque l'axe 5 approche de 0º
Comparés à un bras humain, les axes 4, 5 et 6 correspondent à l'articulation du poignet.
Singularité du Shoulder (épaule) : Lorsque les axes 1 et 6 sont sur la même ligne
Comparés à un bras humain, les axes 4, 1 et 2 correspondent à l'articulation du épaule.
Singularité du Elbow (coude) : Lorsque le robot forme une ligne alors que l'axe 3 s'approche de 0º
Comparé à un bras humain, l’axe 3 correspond au coude.
Attention
Les opérations manuelles et automatiques se déplaçant avec la rotation des articulations ne sont pas influencées par la singularité.
Déplacement de tâche, commande MoveL, etc
La singularité ne se produit que pendant le fonctionnement manuel et automatique lorsque le robot termine son mouvement linéaire.
Mouvement commun, commandes MoveJ, etc
Dans la zone de singularité, le contrôle de force ou le contrôle de conformité n'est pas disponible.
Comme la vitesse de rotation de certains axes augmente rapidement lorsqu'un mouvement linéaire franchit une singularité, il est possible qu'une violation de limite de vitesse de joint ou de limite d'angle de joint se produise.
Comment éviter la singularité
Les robots Doosan Robotics offrent des options pour éviter les singularités lors du contrôle des mouvements. Cependant, il est recommandé de configurer une tâche qui ne crée pas d'exceptions à l'aide de commandes de mouvement de joint telles que MoveJ dans les zones de singularité.
Voici les options d'évitement de singularité fournies par Doosan robot :
Évitement automatique : Effectue un mouvement en évitant les singularités. Cependant, le mouvement du robot peut différer de la trajectoire attendue.
Priorité du chemin : Maintient la trajectoire et la vitesse, mais peut s'arrêter en raison d'une erreur près d'une singularité.
Vitesse variable : Maintient la trajectoire, mais décélère près d'une singularité.
Vue d'ensemble de l'angle d'Euler
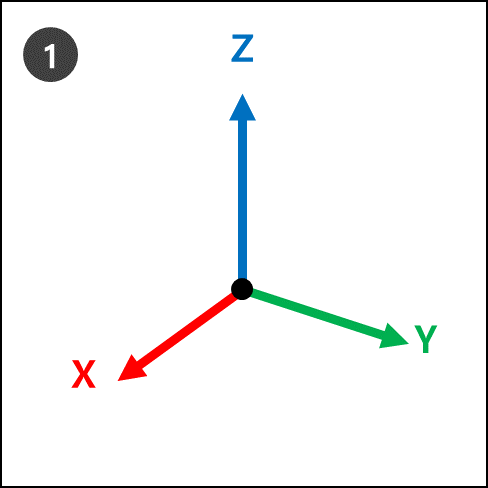
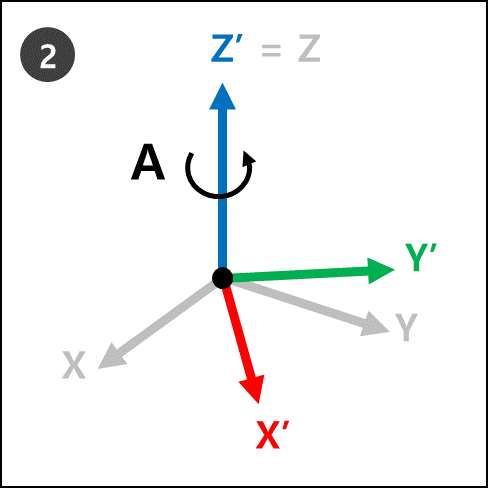
L'angle d'Euler est une façon d'exprimer les angles des axes X, y et Z, qui sont perpendiculaires entre eux dans la direction de l'objet. A, B et C se réfèrent aux angles de rotation séquentiels. Chaque fabricant de robots définit cet ordre de rotation A, B et C différemment, comme Rz-Ry-Rz, Rz-Ry-Rx ou Rx-Ry-Rz.
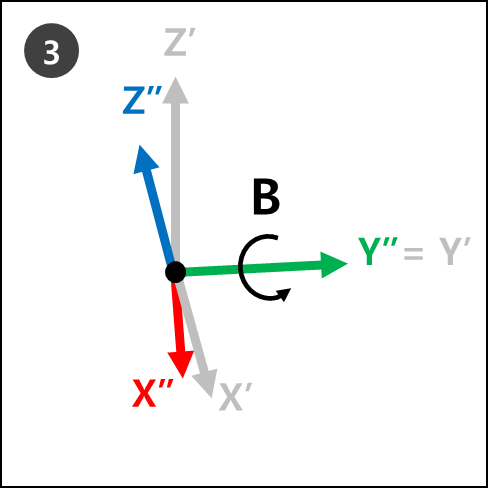
Par exemple, Rz-Ry-Rx. Ici, Rz signifie la rotation dans l'axe Z, Ry signifie la rotation dans l'axe y et Rx signifie la rotation dans l'axe X. RZ peut être exprimé comme angle A, Ry comme angle B et Rx comme angle C pour indiquer le sens de rotation actuel d'un objet. Notez qu'une fois la rotation effectuée dans la direction de l'axe Z à partir des coordonnées, les rotations seront effectuées en fonction des nouvelles coordonnées.
Ceci peut être visualisé avec les étapes 1 à 4.
 |
 |
 |
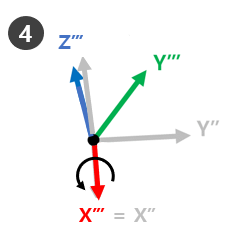 |
Les nouvelles coordonnées (Z’’’, Y’’’, X’’’ de l’étape 4 font référence à la rotation actuelle du robot lorsque les angles d’Euler A, B et C sont appliqués.
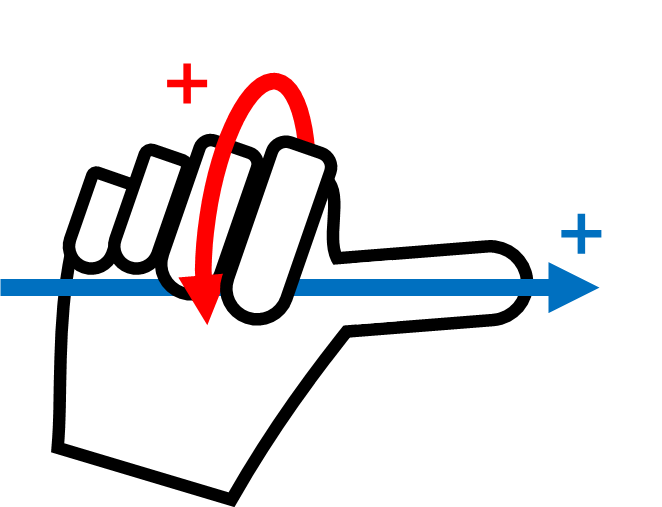
Cela peut être facilement visualisé avec sa main droite. Faites la pose suivante avec votre main droite. C'est ce qu'on appelle la règle de la main droite, et rendre le pouce (axe X), l'index (axe y) et le majeur (axe Z) perpendiculaires les uns aux autres créera des coordonnées composées des axes X, y et Z.
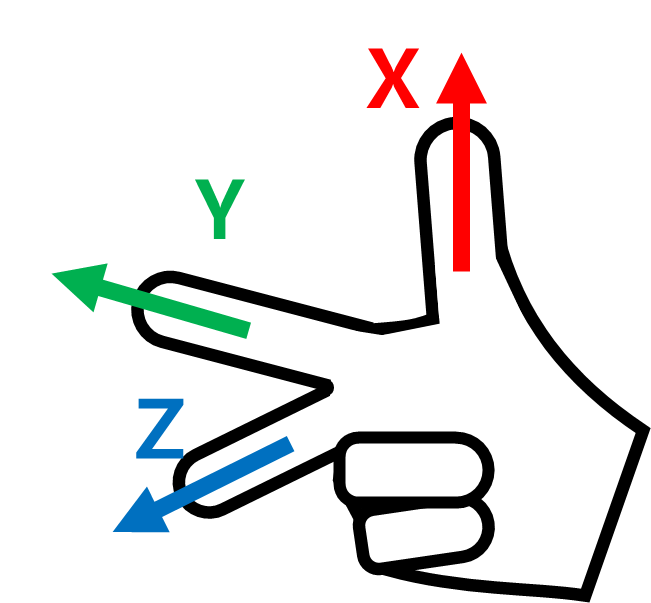
Ensuite, faites la pose cartésienne de la règle de droite et faites les rotations Rz, Ry et Rx dans l'ordre séquentiel.
Rz : Faites pivoter le doigt du milieu (axe Z) de A degrés.
Ry : Faites pivoter le doigt index (axe Y) de B degrés.
Rx : Faites pivoter le pouce (axe X) de C degrés.
Remarque
La direction de rotation + de la direction de rotation + de A, B et C est la direction de quatre doigts sauf le pouce, lorsque le pouce pointe vers la direction + et que les quatre doigts sont serrés. C'est ce qu'on appelle la loi de la vis dans le sens horaire.