
Présentation du concept de contrôle de conformité/force de la commande Editeur de tâches
Le contrôle de force et le contrôle de conformité sont des fonctions qui contrôlent la force du robot. En outre, avec l'ajout de commandes de mouvement, la force peut être contrôlée en même temps que le mouvement est effectué. Le contrôle de conformité et le contrôle de force présentent les différences suivantes, respectivement.
Contrôle de Compliance
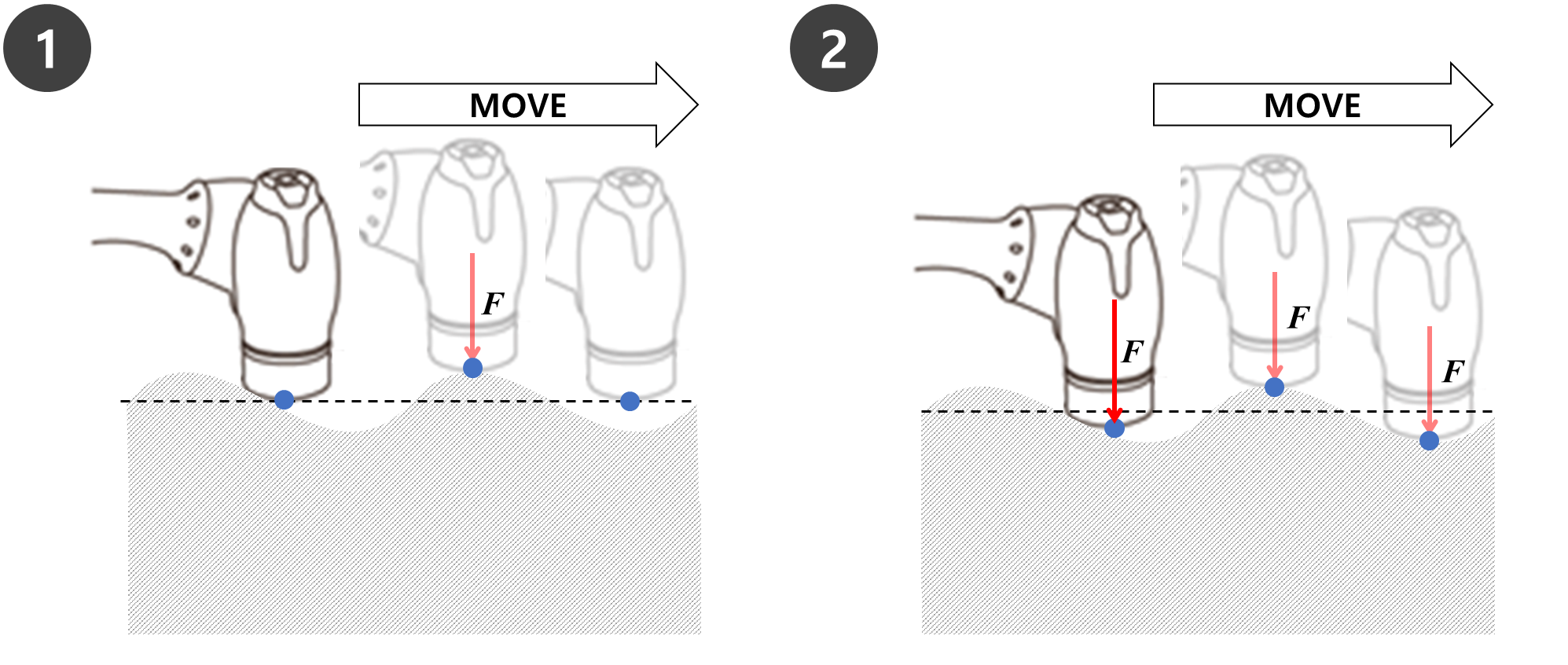
Dans le cas du contrôle de conformité, le robot se conforme à la force externe à l'extrémité TCP du robot et lorsque la force externe est supprimée, une force est générée pour déplacer le robot à l'endroit où il devrait être.
Cette approche peut être utilisée lorsqu'un robot se déplace en ligne droite sur une surface bosselée et que vous voulez vous assurer que le robot se déplace sans causer de dommages à lui-même ou à la surface. Cela peut également être utilisé pour éviter les collisions inattendues à proximité des pièces.
Contrôle de la force
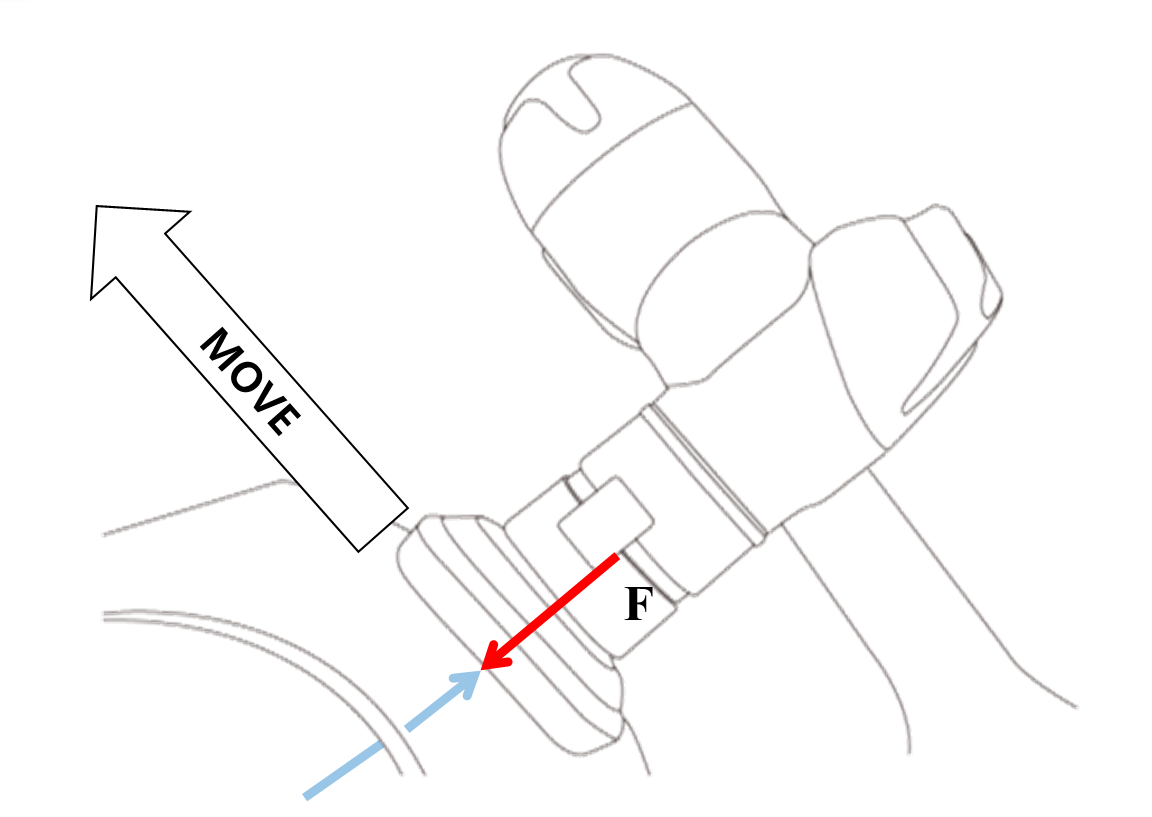
Dans le cas du contrôle de la force, la force est appliquée au TCP à l'extrémité du robot. L'accélération est générée dans la direction dans laquelle la force est générée, ce qui provoque le déplacement simultané du robot dans la direction de la force en plus de la direction du mouvement.
Lorsque le robot entre en contact avec un objet, la force est appliquée à l'objet jusqu'à ce que la force définie et la force répulsive de l'objet soient en équilibre
Cette approche peut être utilisée lorsqu'un robot se déplace en ligne droite sur une surface bosselée et que vous voulez vous assurer qu'une force constante est appliquée à une surface. Cela peut également être utilisé pour des tâches qui nécessitent que le robot pousse avec une force constante, c'est-à-dire, le travail de polissage.
Remarque
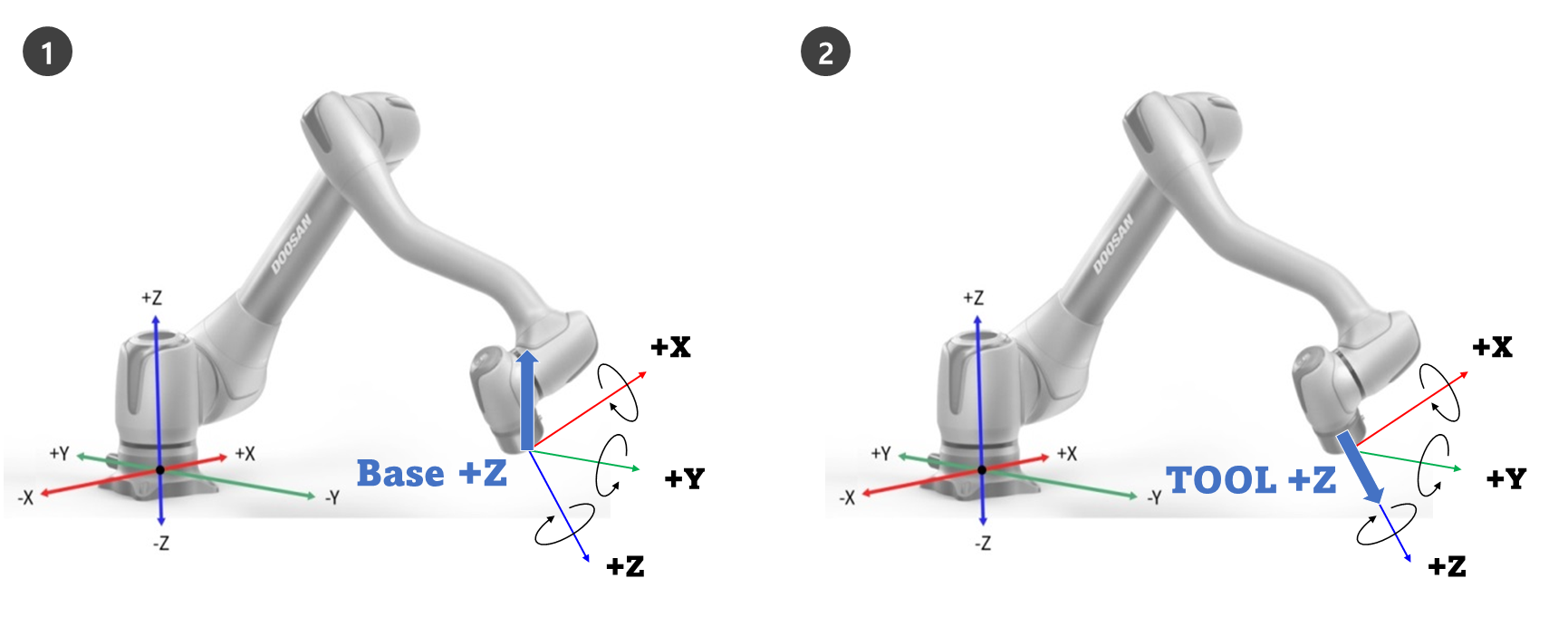
Les commandes de Compliance et de Force sont exécutées en fonction des coordonnées actuelles. La coordonnée par défaut d'une tâche est les coordonnées de base, et les coordonnées peuvent être modifiées avec la commande définir.
Fig. 1 est la direction de fonctionnement lorsque le contrôle force/compliance dans la direction +Z est appliqué aux coordonnées de base.
Fig. 2 est la direction de fonctionnement lorsque le contrôle de force/compliance dans la direction +Z est appliqué aux coordonnées de l'outil.
Contrôle de Compliance
Le contrôle de compliance est la fonction qui se conforme à la force externe en fonction de la rigidité définie lorsqu'une force est appliquée sur le TCOP à l'extrémité du robot. Il équilibre les forces au point cible, et c'est une méthode de contrôle qui génère une force de repoussage si le déplacement se produit à l'écart du point d'équilibrage. Pendant le contrôle de compliance, l'extrémité du robot rebondit comme un ressort.
En cas de collision lorsque le contrôle de mouvement est utilisé seul, il est possible que l'objet heurté soit endommagé.
Les robots Doosan Robotics s'arrêtent en toute sécurité lorsqu'une collision se produit, mais en fonction des paramètres de l'utilisateur, tels que limites de sécurité > sensibilité de collision, les situations suivantes peuvent se produire.
Si le contrôle de conformité est activé pendant le contrôle de mouvement, le robot se déplace tout en se conformant à l'objet heurté.
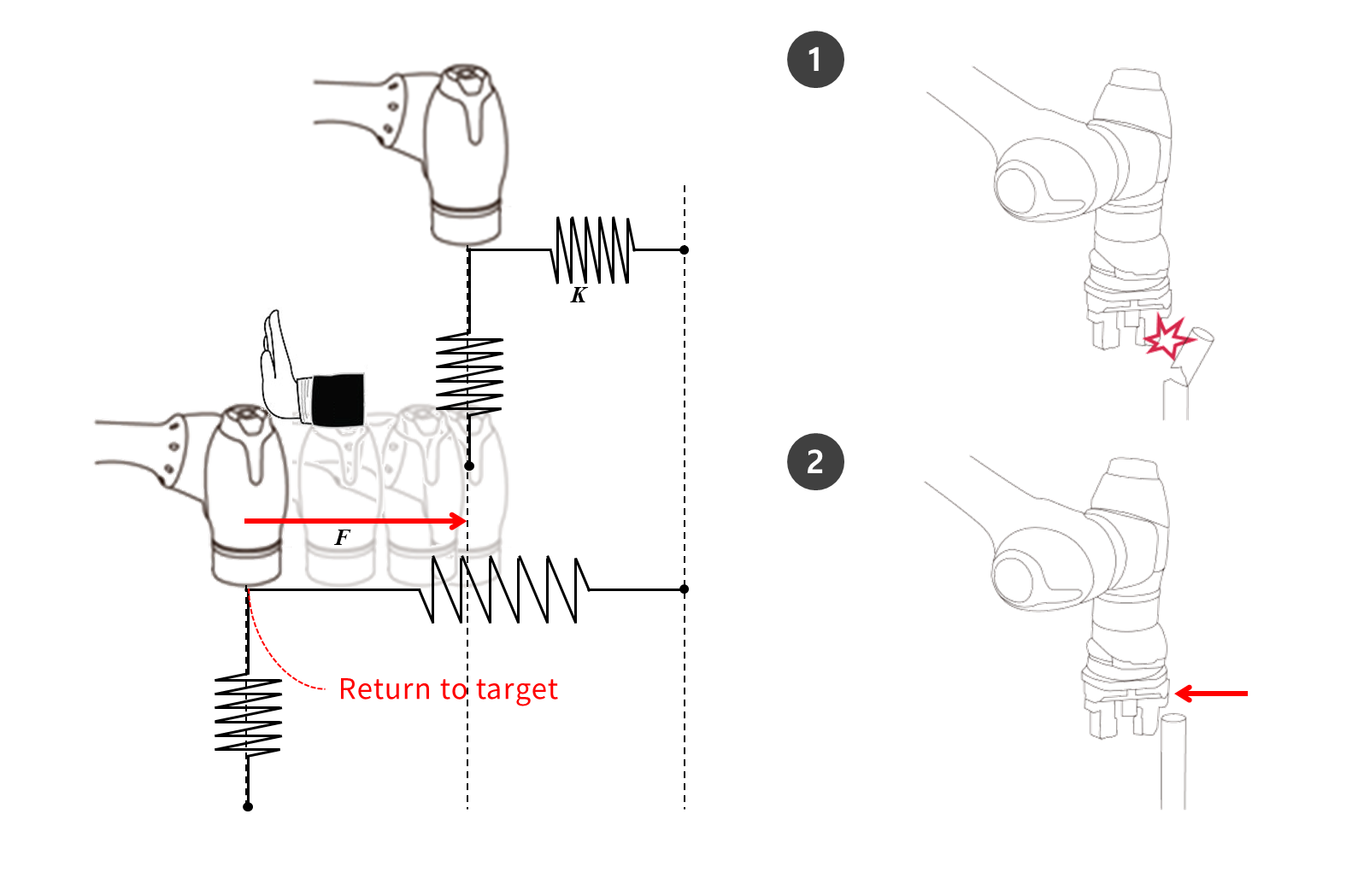
Si F est la force externe, K est la raideur et X est la distance, les formules suivantes sont vraies.
F = K * X
K = F / X
X = F / K
D'après les formules ci-dessus, si la rigidité du contrôle de compliance est définie sur 1000N/m et si le robot se déplace de 1 mm, la force externe générée est de 1N.
F=1000 N/m*0,001 m=1 N (0,001 m=1 mm)
Remarque
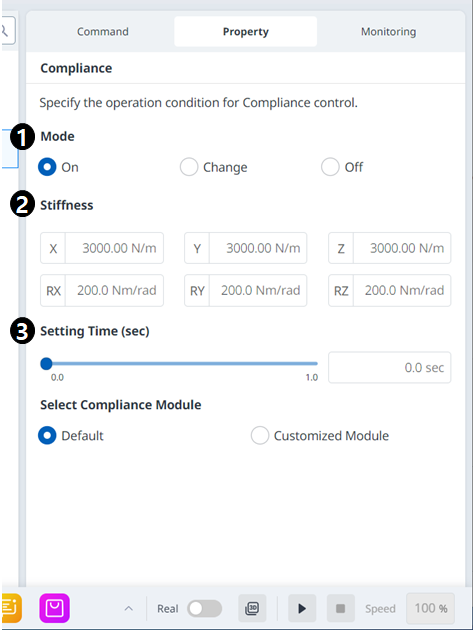
Dans la propriété de la commande conformité, les valeurs suivantes peuvent être définies :
Mode
On: Active le contrôle de conformité
Modifier : Si le mode de conformité est activé, il devient raideur
Off: Désactive le contrôle de conformité
Plage de raideur
M/H Series: Translation (0~20000N/m), rotation (0~1000Nm/rad)
A Series: Translation (0~10000N/m), rotation (0~300Nm/rad)
Les valeurs de rigidité inférieures réagiront plus doucement à la force externe et nécessiteront plus de temps pour revenir au point cible
Réglage de l'heure
Il s'agit du temps nécessaire pour que la valeur de rigidité actuelle atteigne la valeur de rigidité définie (0-1s)
Attention
Le poids de l'outil et le TCP (point central de l'outil) doivent être réglés avec précision. Un poids d'outil inexact peut amener le robot à détecter le poids d'outil comme une force externe, et l'activation de la commande Compliance génère une erreur de position.
La tension de l'habillage peut générer un couple externe sur le robot. Par conséquent, soyez prudent lors de l'installation du pack de vêtements.
La conformité ne peut pas être activée ou désactivée pendant l'exécution d'un mouvement asynchrone ou d'un mouvement de fusion.
Lorsque la commande Compliance est activée, seul le mouvement linéaire est autorisé. Les mouvements conjoints, tels que MoveJ et MoveSJ, ne sont pas autorisés.
Pendant l'activation de la commande de conformité, le poids outil ou TCP ne peut pas être modifié.
Pendant l'activation de la commande de compliance, il est possible que le point cible ne soit pas atteint avec précision en raison de la compliance du couple généré pendant l'exécution du mouvement. Par conséquent, il est recommandé d'activer le contrôle de conformité près du point cible. Il est également possible de minimiser l'erreur de position en définissant une valeur de rigidité élevée.
Contrôle de Force
Le contrôle de Force est une fonction qui applique une force dans la direction de contrôle de force jusqu'à ce que la force définie et la force de répulsion soient équilibrées
Il déplace le robot dans la direction de la force définie, et si le contact avec un objet est effectué, il maintient la force entrée (N)
Il est capable de contrôler le mouvement dans une direction différente de la direction de la force tout en appliquant une force constante
Le réglage minimum est de +/- 10N, et il peut être affiné avec une résolution de 0.2N
Le contrôle de la Force n'est pas disponible dans la zone de singularité
n en général, le contrôle de Compliance est utilisé en conjonction avec le contrôle de force afin que le contrôle de force soit conforme à la force externe
Remarque
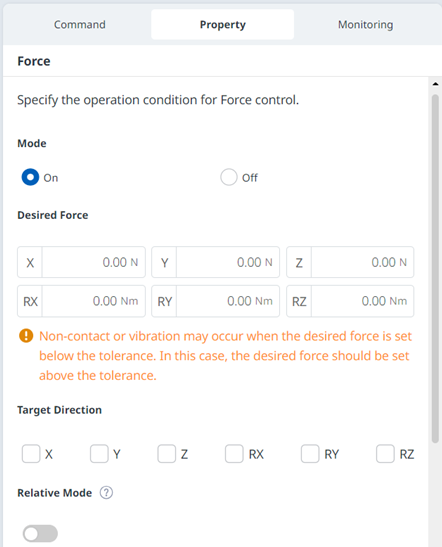
Les valeurs suivantes peuvent être définies à partir de la propriété Force Command.
Mode
On: Active le contrôle de Force
Off: Désactive le contrôle forcé
Plage de force souhaitée
X, Y, Z: 10 - (maximum de chaque robot) N
A, B, C : 5 - (maximum de chaque robot) Nm
Pour plus d'informations sur la force maximale, reportez-vous à la section plage de seuils supérieure/inférieure et valeur par défaut des paramètres de sécurité.
Direction de la cible
Il se déplace vers la valeur cible sélectionnée pour chaque direction.
Plusieurs sélections peuvent être effectuées.
Le contrôle de la force ne peut être exécuté qu'avec le réglage de la direction après le réglage de la force.
Si l'une des directions sélectionnées atteint la force cible, elle continuera à se déplacer jusqu'à ce que la valeur cible soit atteinte pour l'autre direction.
Mode relatif
Si ce mode est activé, il étalonne la force externe appliquée sur le robot à 0 pour améliorer la précision du contrôle de force.
Lorsque le mode relatif est désactivé, la force réelle appliquée sur la cible est égale à la somme de la force définie et de la force externe.
Lorsque le mode relatif est activé, la force réelle appliquée sur la cible est égale à la force définie.
Pendant le contrôle de la force, une déviation peut se produire en fonction de la pose ou de la force externe.
Pendant le contrôle de force, il est possible de ne pas atteindre le point cible exact. Par conséquent, il est recommandé d'activer le contrôle de force près du point cible.
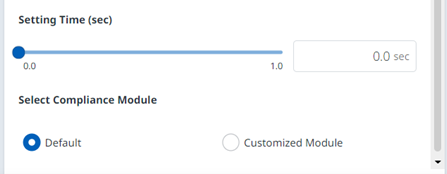
Réglage de l'heure
Il s'agit du temps nécessaire pour que la valeur de force actuelle atteigne la valeur de force définie (0-1s)
Commande de Thread
Les threads peuvent être créés et exécutés dans l'éditeur de tâches.
Remarque
Les contraintes pour les threads sont les suivantes :
Un nom de thread ne peut pas commencer par un chiffre et ne peut contenir que des lettres minuscules, des chiffres et des traits de soulignement. Le nom ne doit pas dépasser 30 caractères ou être dupliqué avec un autre nom de thread.
Dans l'écran de l'éditeur de tâches, lorsque vous cliquez sur la commande filetage, les commandes filetage et fin du filetage sont ajoutées au panneau de la liste des tâches. Un maximum de quatre threads est autorisé par tâche.
Les commandes suivantes ne peuvent pas être configurées seules et doivent être implémentées dans des instructions conditionnelles :
Move, Move L, Move J, Move SX,Move SJ, Move C, Move B, Move Spiral, Move Periodic, Move JX
Define, Set, Sub, Thread, Break, Weight Measure
Commandes de contrôle de force (Compliance, Force)
Commandes de signal (Add Signal, Set Signal, Get Signal, Delete Signal)
Commandes avancées (Hand guide, Nudge)
Commandes utilisateur