
Présentation de Sub/Call Sub

Sub est une abréviation de Subroutine. Un sous-programme fait référence à un processus qui minimise le nombre d'étapes dans un programme en appelant les parties nécessaires lorsque deux parties dupliquées ou plus sont présentes.
Les robots Doosan Robotics fournissent une commande CallSub pour appeler les commandes Sub et le sous-paragraphe correspondant.
La commande Sub fonctionne comme défini en Python.
Remarque
Le sous-paragraphe doit être ajouté dans MainSub, au début d'un paragraphe principal, et EndMainSub, à la fin d'un paragraphe principal.
En plus de la répétition, la commande Sub est également utilisée pour simplifier un paragraphe principal. L'utilisation d'une sous-commande permet d'identifier de manière intuitive la tâche d'un paragraphe principal en cours d'exécution.
L'utilisation d'une commande sous-paragraphe permet de tester les unités de sous-paragraphe.
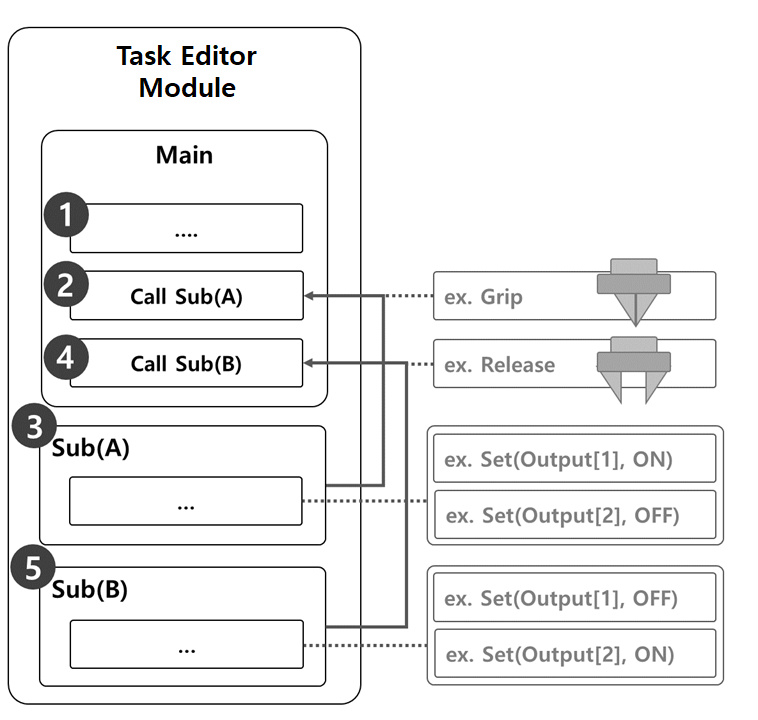
L'exemple dans lequel une sous-commande est utilisée pour exécuter les mouvements de préhension et de relâchement d'un préhenseur de robot comprend les éléments suivants.
Les lignes du paragraphe principal exécutent le programme de tâches dans l'ordre séquentiel à partir de la première ligne.
Déplacer vers Sub(A) appelé par Call Sub.
Échantillon
Programme : Appelez la sous-routine Grip.
Robot : Pas de mouvement
Sub(A) est exécuté. Toutes les lignes de sous-paragraphe sont exécutées dans l'ordre séquentiel, retourne au paragraphe principal et exécute la ligne suivante.
Échantillon
Programme : Exécutez les lignes du sous-programme Grip dans l'ordre séquentiel. Utilisez la commande set pour définir la sortie [1] sur ON et la sortie [2] sur OFF.
Robot : La pince robot exécute le mouvement Grip.
Déplacer vers Sub(B) appelé par Call Sub.
Échantillon
Programme : Appelez la sous-routine Release.
Robot : Pas de mouvement
Sub(B) est exécuté. Toutes les lignes de sous-paragraphe sont exécutées dans l'ordre séquentiel, retourne au paragraphe principal et exécute la ligne suivante.
Échantillon
Programme : Exécutez les lignes du sous-programme Grip dans l'ordre séquentiel. Utilisez la commande set pour définir la sortie [1] sur OFF et la sortie [2] sur ON.
Robot : La pince du robot exécute le mouvement de libération.
Ajouter une sous-commande
Dans le module Editeur de tâches, dans la section contrôle de flux du menu commande de droite, ajoutez une sous-commande.
Entrez le nom de la sous-routine.

Ajouter CallSub, commande
Dans le module Editeur de tâches, dans la section contrôle de flux du menu commande de droite, ajoutez une sous-commande appeler.
Sélectionnez le nom de sous-programme enregistré avec la commande Sub.

Remarque
Si le nombre de lignes augmente dans le programme de tâches, il peut devenir difficile de trouver des sous-programmes. Dans ce cas, appuyez sur aller à la sous-routine sélectionnée dans la commande propriété de CallSub pour déplacer le focus vers la ligne de commande Sub correspondante.