
CONTRÔLEUR DC (CS-12P)
Présentation du produit (CS-12P)
Nom de chaque pièce et fonctions
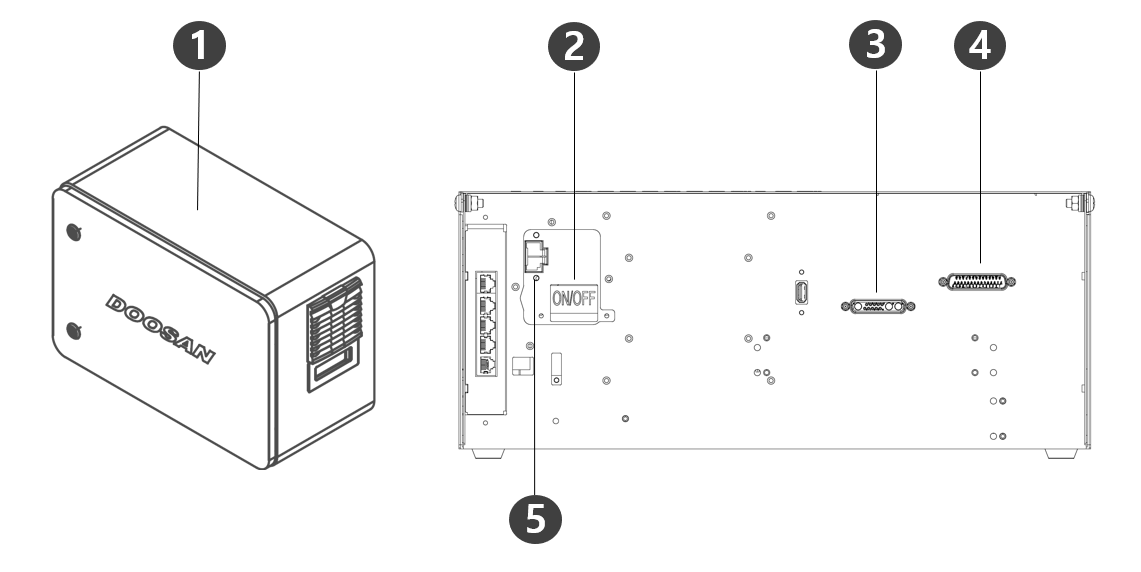
No. | Éléments | Description |
1 | Borne de connexion E/S (interne) | Il peut être connecté aux contrôleurs ou périphériques d'autres robots. |
2 | Interrupteur d'alimentation | Utilisé pour ACTIVER/DÉSACTIVER l'alimentation principale du contrôleur . |
3 | Terminal de connexion du câble du boîtier d’apprentissage | Utilisé pour connecter le câble du boîtier d’apprentissage au contrôleur. |
4 | borne de connexion de câble de robot | Permet de connecter le câble du robot au contrôleur. |
5 | Borne de connexion d'alimentation | Permet de connecter l'alimentation du contrôleur. |
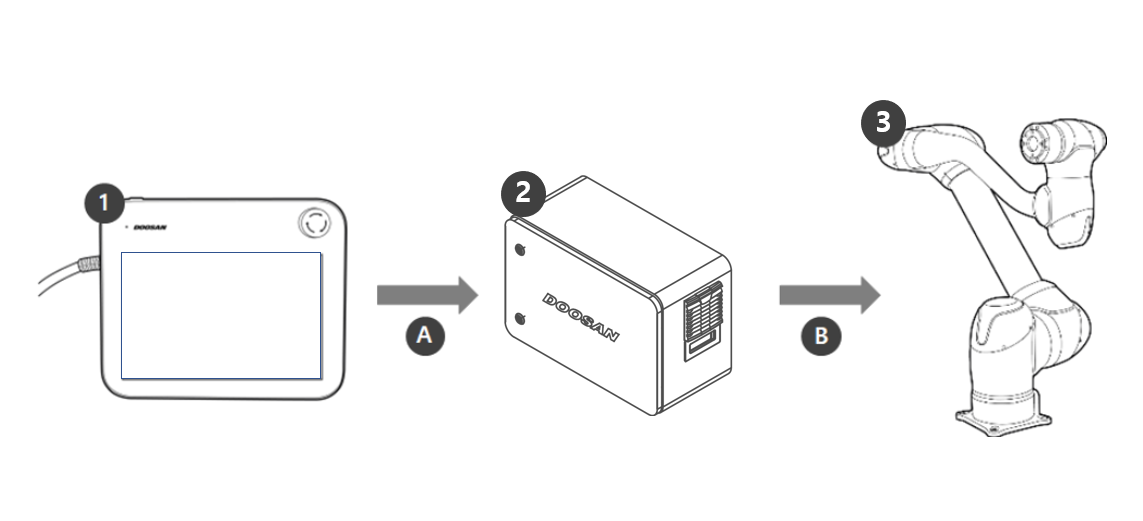
Configuration du système
No. | Nom | Description |
|---|---|---|
1 | Boîtier d'apprentissage | Ce dispositif gère l'ensemble du système et est capable d'apprendre au robot des poses spécifiques ou de faire des réglages liés aux manipulateurs et aux contrôleurs. |
2 | Contrôleur | Il contrôle les mouvements du robot en fonction de la pose ou des déplacements définis par le boîtier d’apprentissage. Il dispose de divers ports d'E/S qui permettent la connexion et l'utilisation de divers équipements et périphériques. |
3 | Manipulateur | C’est un robot collaboratif industriel qui peut effectuer des tâches de transport ou d’assemblage avec divers outils. |
A | Commande/surveillance | |
B | Alimentation/réseau |
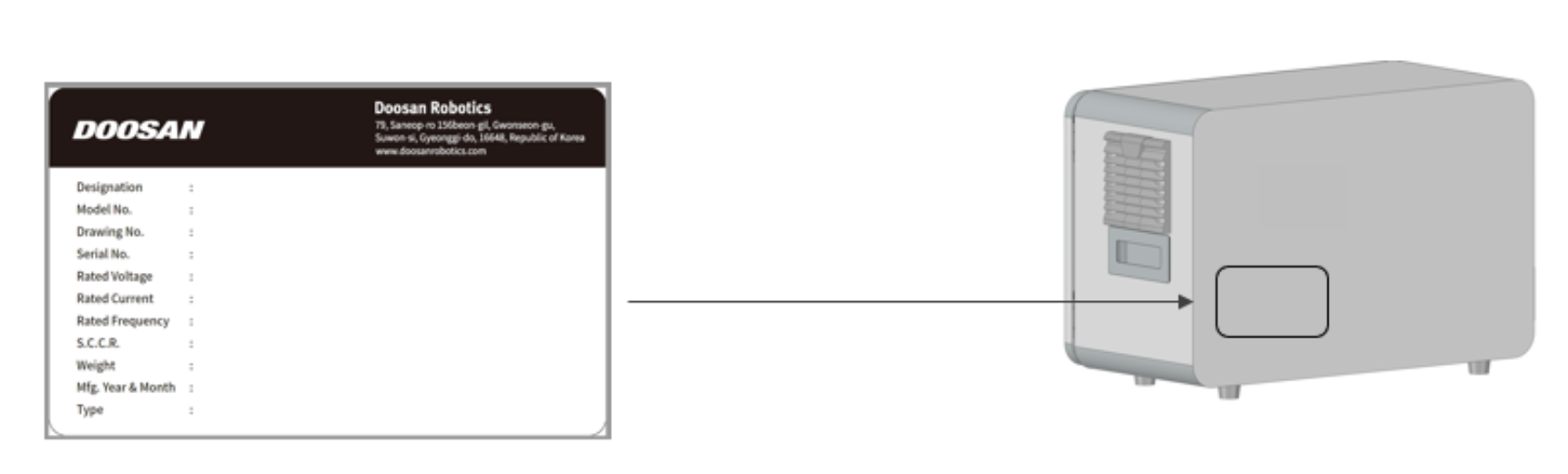
Plaques signalétiques et étiquettes
Installation (CS-12P)
Précautions à prendre lors de l'installation
Attention
Prévoyez suffisamment d'espace avant d'installer le contrôleur. Si suffisamment d’espace n’est pas assuré, le contrôleur peut être endommagé ou le câble du manipulateur ou du boîtier d’apprentissage peut subir des dommages.
Vérifiez l'alimentation d'entrée lorsque vous branchez le produit sur l'alimentation. Si l'alimentation d'entrée connectée est différente de la puissance d'entrée nominale (22-60VDC), le produit ne fonctionne pas correctement ou le contrôleur peut être endommagé.
Environnement de l'installation
Lors de l'installation du contrôleur, tenez compte des éléments suivants.
Prévoyez suffisamment d'espace avant d'installer le contrôleur.
Le contrôleur doit être fixe.
Assurez-vous qu'aucun composant n'est fixé dans le véhicule mobile.
Installation du matériel
Installez le robot, le contrôleur et le boîtier d’apprentissage, les composants clés du système, et alimentez-les en énergie avant de faire fonctionner le manipulateur. L'installation de chaque composant est réalisée comme suit :
Connexion du manipulateur au contrôleur
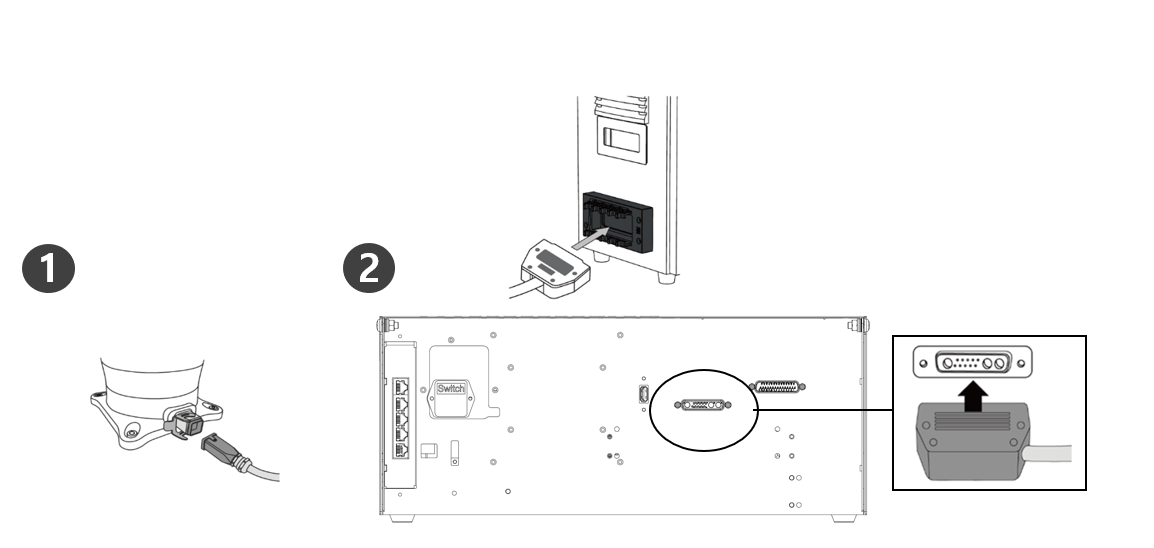
Description | |
|---|---|
1 | Connecter le câble du manipulateur au contrôleur, placer un anneau de fixation
|
2 | Connexion de l'extrémité opposée du câble de connexion du manipulateur au contrôleur
|
Attention
Ne pas débrancher le câble du manipulateur lorsque le robot est allumé. Cela peut entraîner un dysfonctionnement du robot.
Ne pas tenter de modifier ou d'étendre le câble du manipulateur.
Lors de l'installation du contrôleur au sol, dégagez au moins 50 mm de chaque côté pour assurer une ventilation adéquate.
Assurez-vous de verrouiller correctement les connecteurs avant de mettre le contrôleur sous tension.
Remarque
Lors de la configuration du système, il est recommandé d'installer un réducteur de bruit pour éviter les effets de bruit et les dysfonctionnements du système.
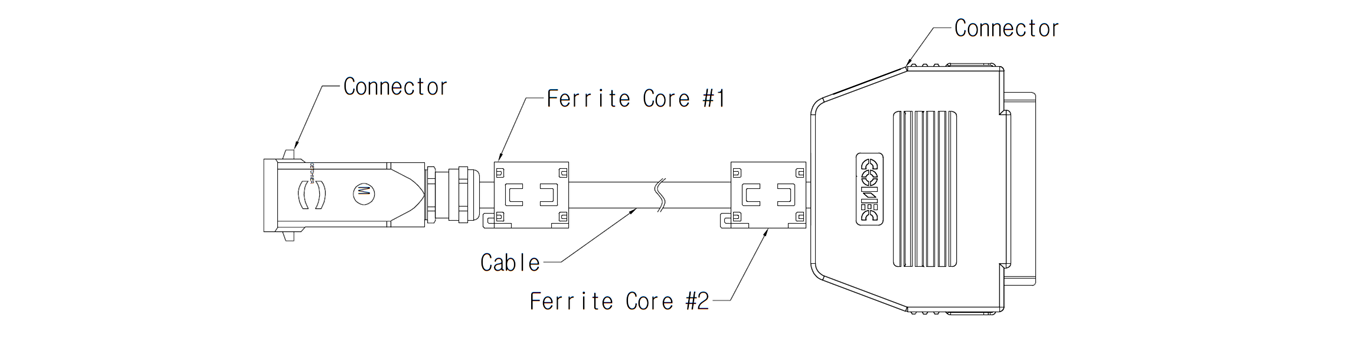
Si le contrôleur est influencé par le bruit généré par les ondes électromagnétiques, il est nécessaire d'installer un noyau de ferrite pour assurer un fonctionnement normal. L'emplacement d'installation est le suivant :
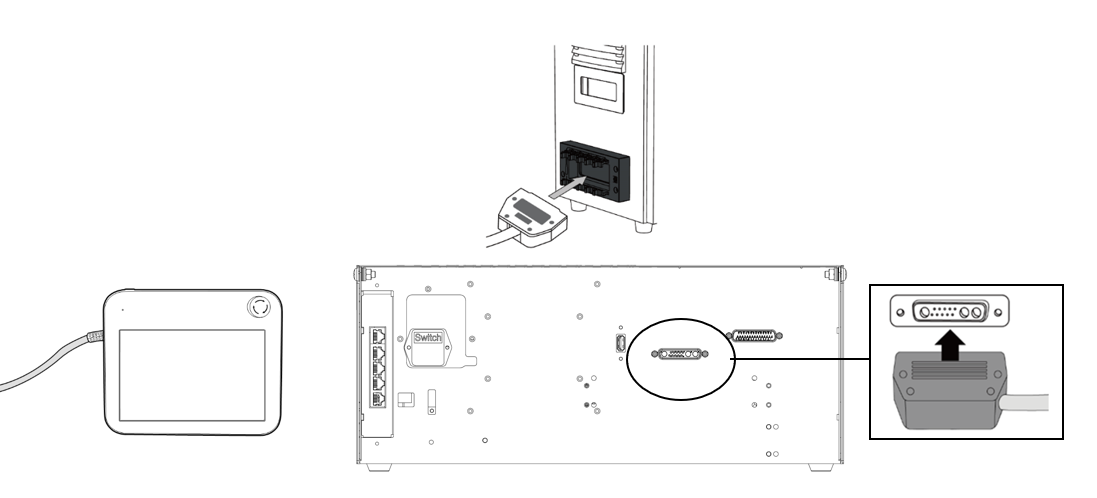
Connectez le contrôleur au boîtier d’apprentissage.
Connectez le câble du boîtier d’apprentissage aux connexions correspondantes du contrôleur jusqu’à ce qu’un clic se fasse entendre et assurez-vous que le câble est bien branché.
Attention
Lors de la connexion du câble, vérifiez la forme de la connexion avant de la connecter afin que la broche ne se plie pas.
Si le boîtier d’apprentissage est utilisé en étant suspendu au véhicule mobile ou au contrôleur, faites attention à ne pas trébucher sur les câbles de connexion.
Faites attention à éviter que le contrôleur, le boîtier d’apprentissage et le câble entrent en contact avec de l’eau.
N’installez pas le contrôleur et le boîtier d’apprentissage dans un environnement poussiéreux ou humide.
Les contrôleurs et la suspension intelligente ne doivent jamais être exposés à des environnements poussiéreux supérieurs à l'indice IP20. Soyez particulièrement prudent dans les environnements contenant de la poussière conductrice.
Remarque
Lors de la configuration du système, il est recommandé d'installer un réducteur de bruit pour éviter les effets de bruit et les dysfonctionnements du système.
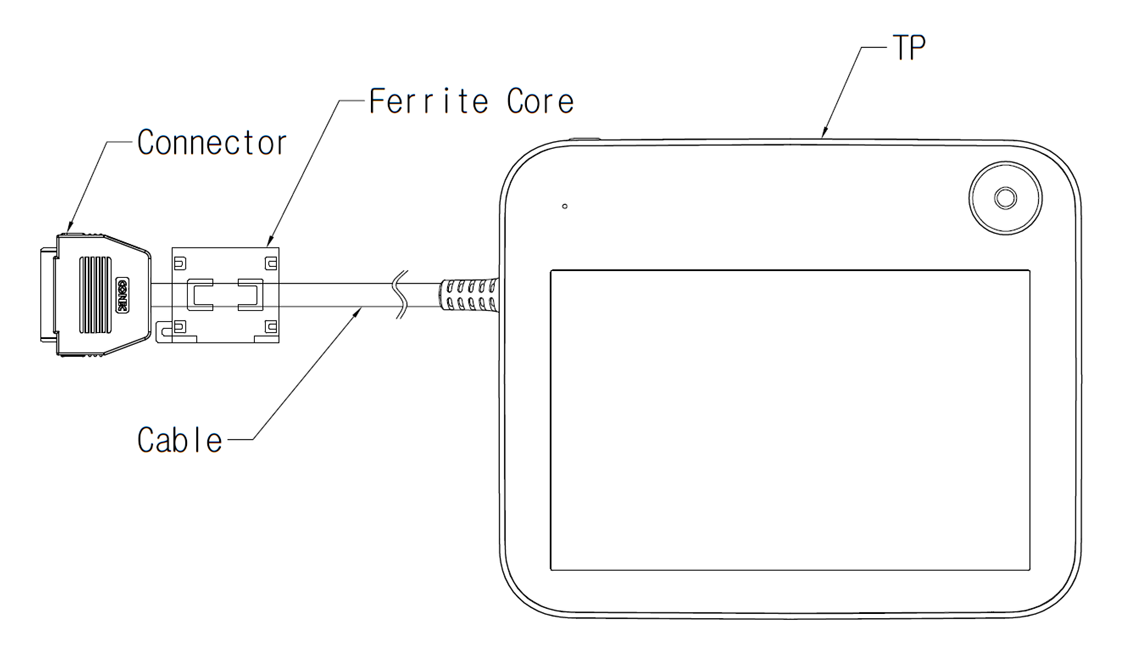
Si le boîtier d’apprentissage est influencé par le bruit généré par les ondes électromagnétiques, il est nécessaire d’installer un noyau de ferrite pour garantir un fonctionnement normal. L'emplacement d'installation est le suivant :
Positionnement du câble du manipulateur et du câble de la télécommande d'apprentissage
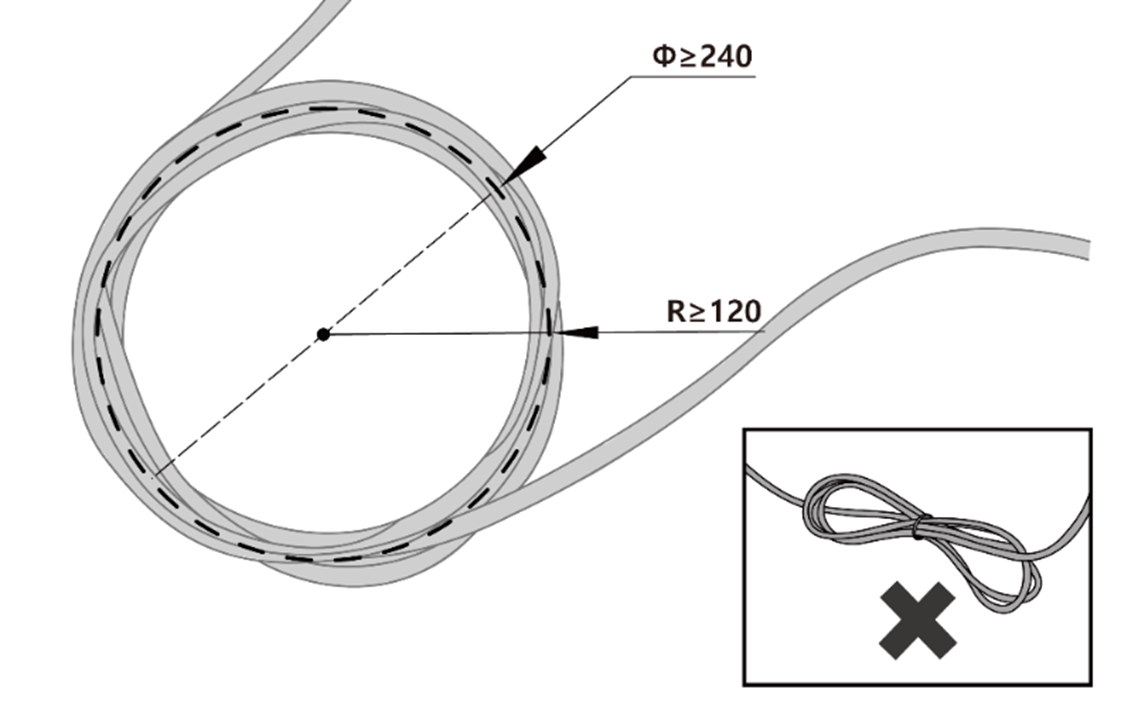
S'assurer que le rayon de courbure du câble du manipulateur et de la poignée de commande d'apprentissage est supérieur au rayon de courbure minimum (120 mm).
Attention
Assurez-vous que le rayon de courbure entre le câble du boîtier d’apprentissage et le connecteur du boîtier d’apprentissage est supérieur au rayon de courbure minimum (120 mm).
Si le rayon de courbure est inférieur au rayon de courbure minimum (120 mm), une déconnexion du câble ou des dommages au produit peuvent survenir.
Dans les environnements où des bruits électromagnétiques peuvent se produire, installez correctement les câbles afin d'éviter tout dysfonctionnement.
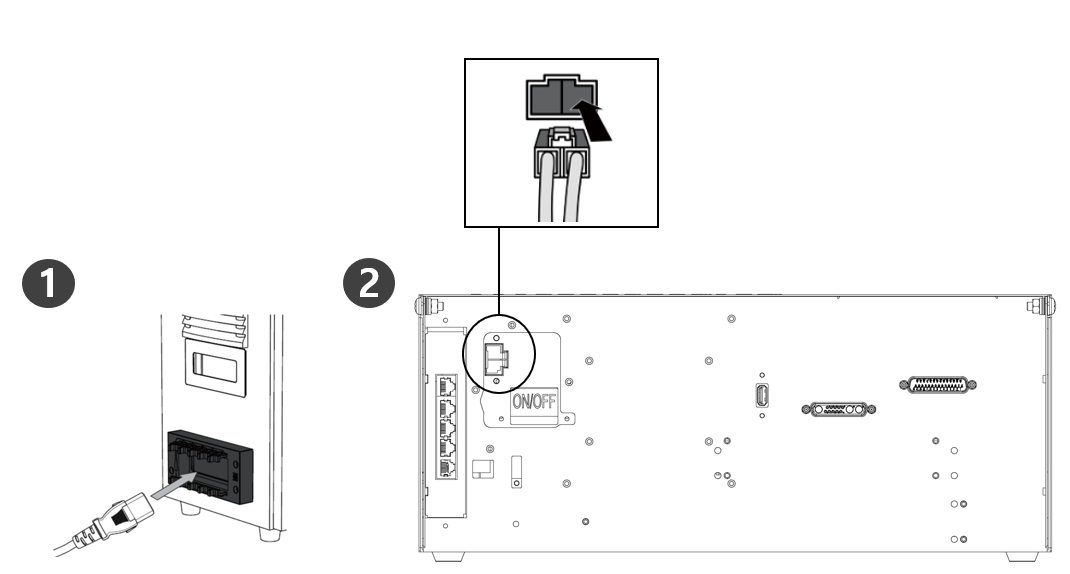
Connexion de l'alimentation au contrôleur
Connectez le câble d'alimentation aux connexions correspondantes sur le contrôleur jusqu'à ce qu'il s'enclenche et assurez-vous que le câble est bien branché.
Avertissement
Assurez-vous que le robot est correctement mis à la terre après avoir connecté les câbles d'alimentation (connexions électriques à la terre). Établissez une mise à la terre commune pour tous les équipements du système avec des boulons inutilisés liés au symbole de mise à la terre à l'intérieur du contrôleur. Le conducteur de mise à la terre doit satisfaire au courant nominal maximal du système.
Protégez la puissance d'entrée du contrôleur à l'aide de dispositifs tels qu'un disjoncteur.
Ne modifiez pas et ne prolongez pas le câble du robot. Cela peut provoquer un incendie ou une panne du contrôleur.
Assurez-vous que tous les câbles sont correctement connectés avant d'alimenter le contrôleur. Utilisez toujours le câble d'origine inclus dans l'emballage du produit.
Veillez à ne pas connecter la polarité de la tension d'entrée de manière incorrecte.
Remarque
Lors de la configuration du système, il est recommandé d'installer un interrupteur d'alimentation capable d'éteindre tous les périphériques en même temps.
Lors de l'utilisation d'un contrôleur DC, le mouvement du robot peut être limité en fonction de la charge et du mouvement.
Si la tension d’entrée est inférieure à 48V, le mouvement du robot peut être limité en fonction de la charge et du mouvement.
L'alimentation doit satisfaire aux exigences minimales telles que la terre et les disjoncteurs. Les spécifications électriques sont les suivantes :
Paramètre | Spécifications |
Tension d'entrée | 22 – 60 VCC |
Courant d'entrée nominal | 30 A |