
Aligner le panneau
Menu
Éléments | Description | |
|---|---|---|
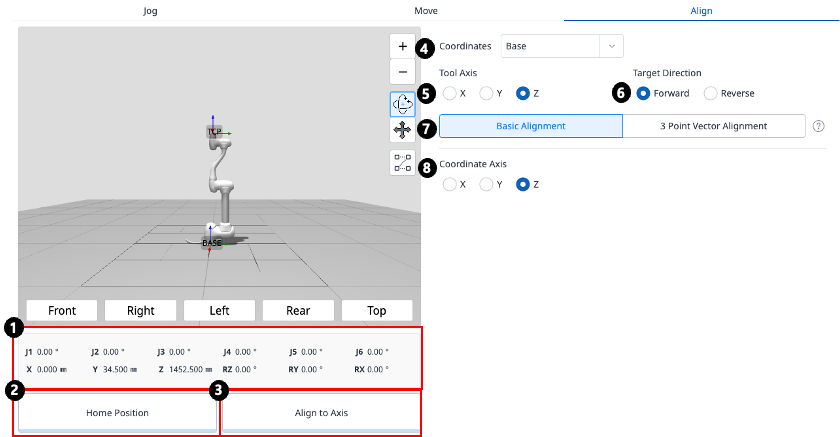
1 | Posture du robot | Affiche la posture de l'articulation et la posture de la tâche actuelles du robot. |
2 | Bouton de position initiale | Déplace le robot à la position initiale lorsque vous cliquez dessus. |
3 | Bouton aligner | Aligne le robot lorsque vous cliquez dessus. |
4 | Sélectionnez système de coordonnées de référence | Sélectionnez le système de coordonnées de référence pour le positionnement. |
5 | Axe outil | Sélectionnez l'axe du TCP à aligner. |
6 | Direction de la cible | Sélectionnez la direction dans laquelle aligner le TCP. |
7 | Méthode d'alignement | Sélectionnez la méthode d'alignement. |
8 | Axe des coordonnées | Sélectionnez l'axe du système de coordonnées de référence avec lequel aligner. |
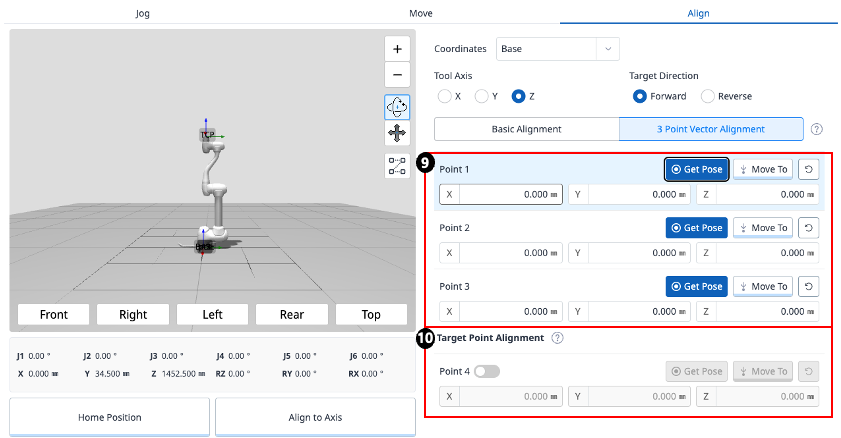
9 | Sélectionnez points sur un plan | Sélectionnez trois points qui définissent le plan. 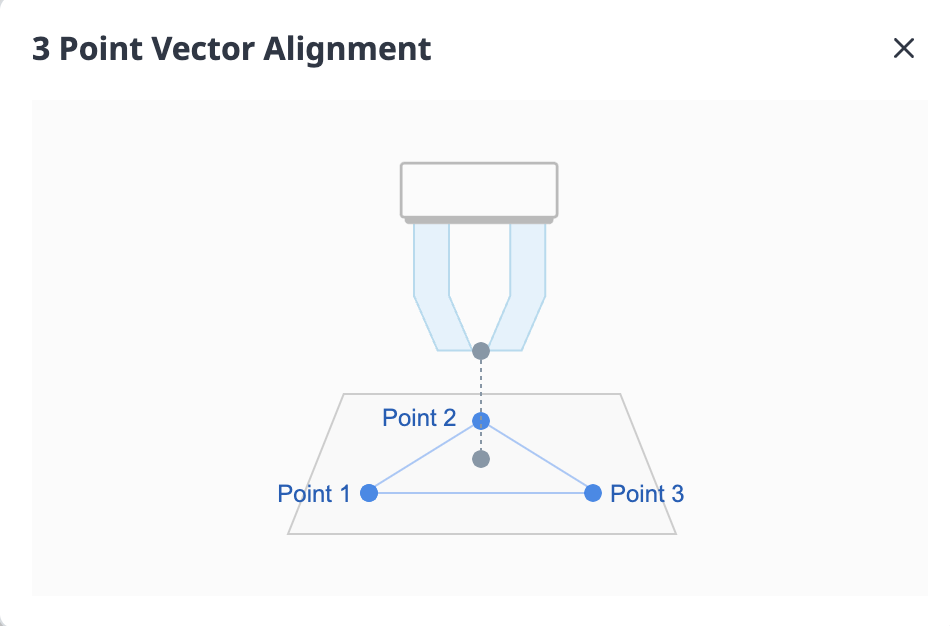 |
10 | Alignement du point cible | Sélectionnez un point pour positionner le TCP. |