
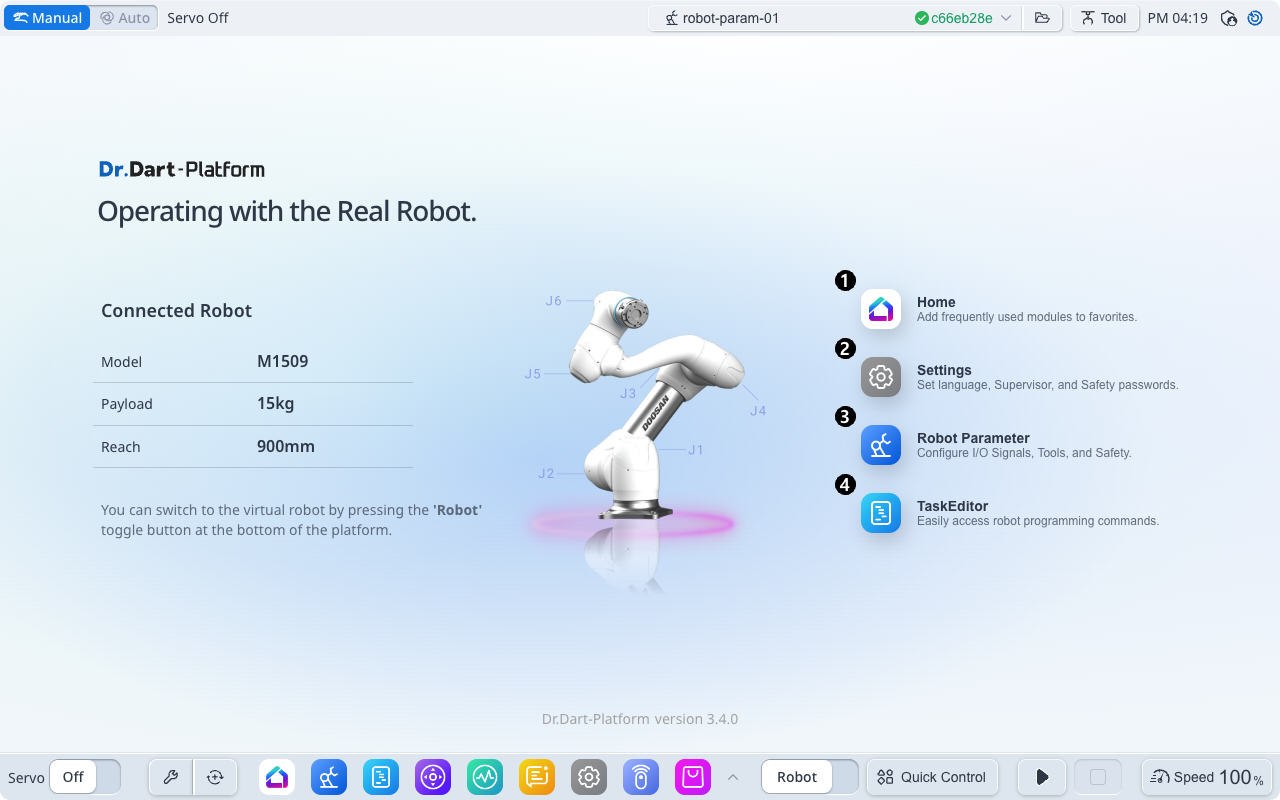
Présentation de la présentation de l'écran du programme
Éléments | Description | |
|---|---|---|
| 1 | Lancez le module Home | Cliquer sur cette icône vous redirigera vers l'écran d'accueil de Dart-Platform. |
| 2 | Icône du module Paramètres | Lancez le module Paramètres. |
| 3 | Icône du module de paramètres du robot | Lancez le module Paramètres du robot. |
| 4 | Icône du module Editeur de tâches | Lancez le module Editeur de tâches. |
Éléments | Description | |
|---|---|---|
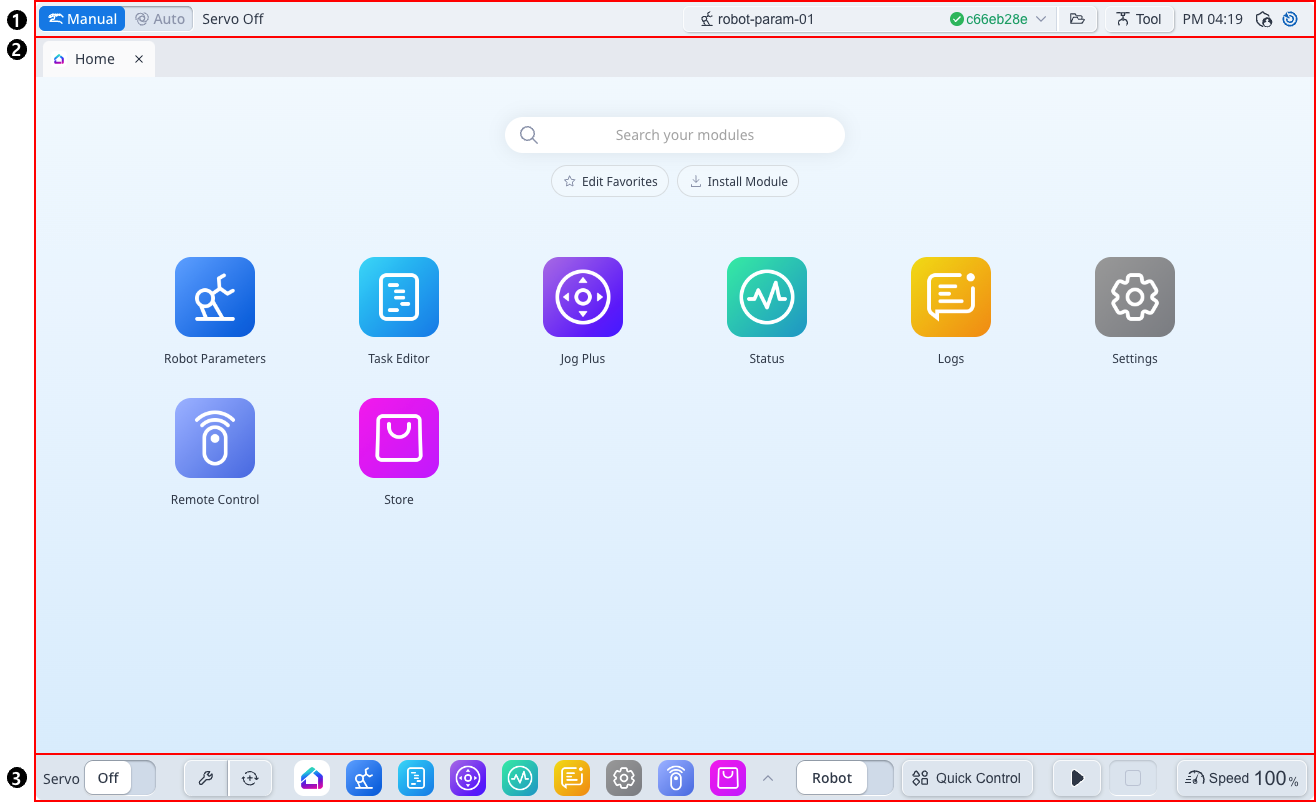
| 1 | En-tête | Panneau qui fournit le commutateur de mode Auto/Manuel, l'état du robot, les Robot parameters, les paramètres de l'outil, le menu et l'heure. |
| 2 | Corps | Panneau qui affiche l'écran du module que vous avez exécuté. |
| 3 | Pied de page | Panneau qui fournit le commutateur servo, les modules favoris, le commutateur de mode robot/virtuel, le contrôle rapide et le contrôle de programme et le contrôle de vitesse du robot. |
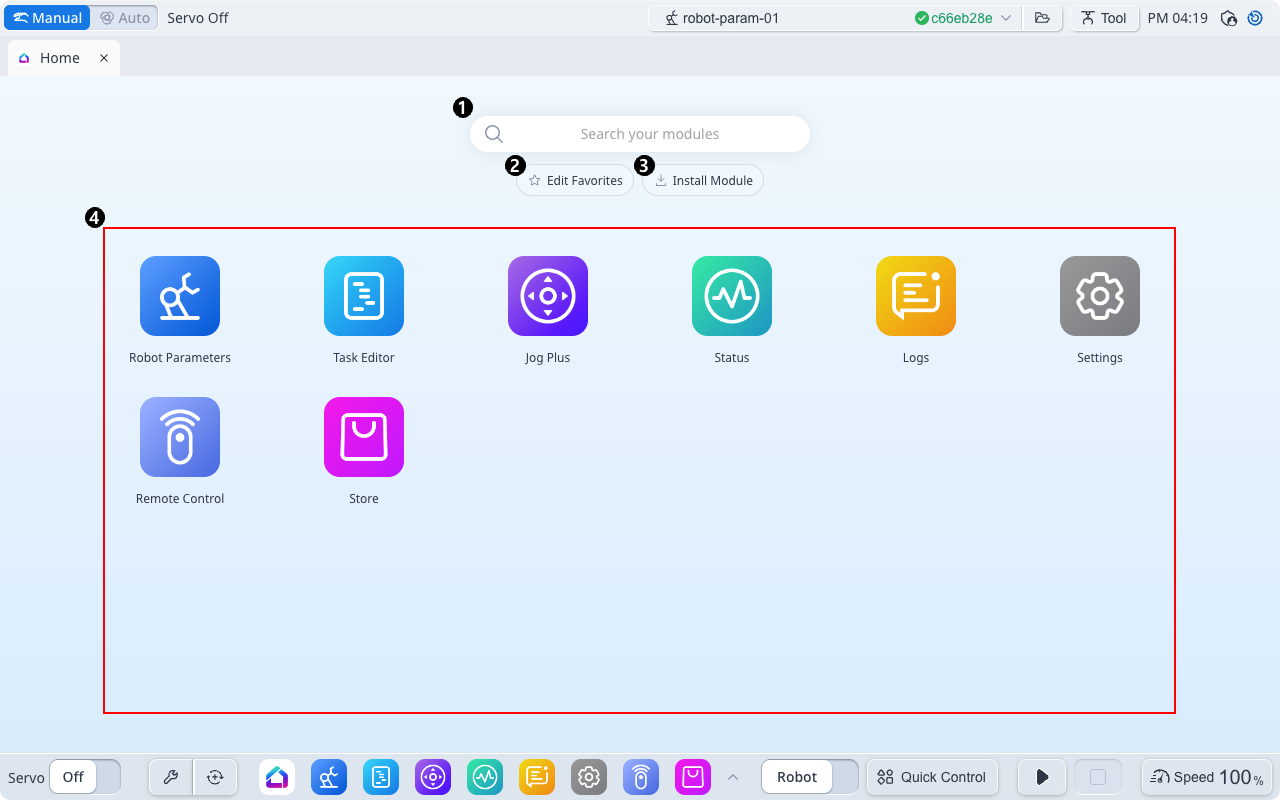
Présentation de l'écran d'accueil
Éléments | Description | |
|---|---|---|
| 1 | Rechercher | Permet de rechercher des modules installés. |
| 2 | Modifier le favori | Vous pouvez sélectionner les modules à afficher dans la liste modules favoris du pied de page. Si vous cliquez sur le MODIFIER LES FAVORIS bouton pour cocher/décocher le module, il s’appliquera immédiatement à la liste des modules favoris du pied de page. Cliquez sur le ENREGISTRER LES FAVORIS bouton pour terminer la modification de vos favoris. 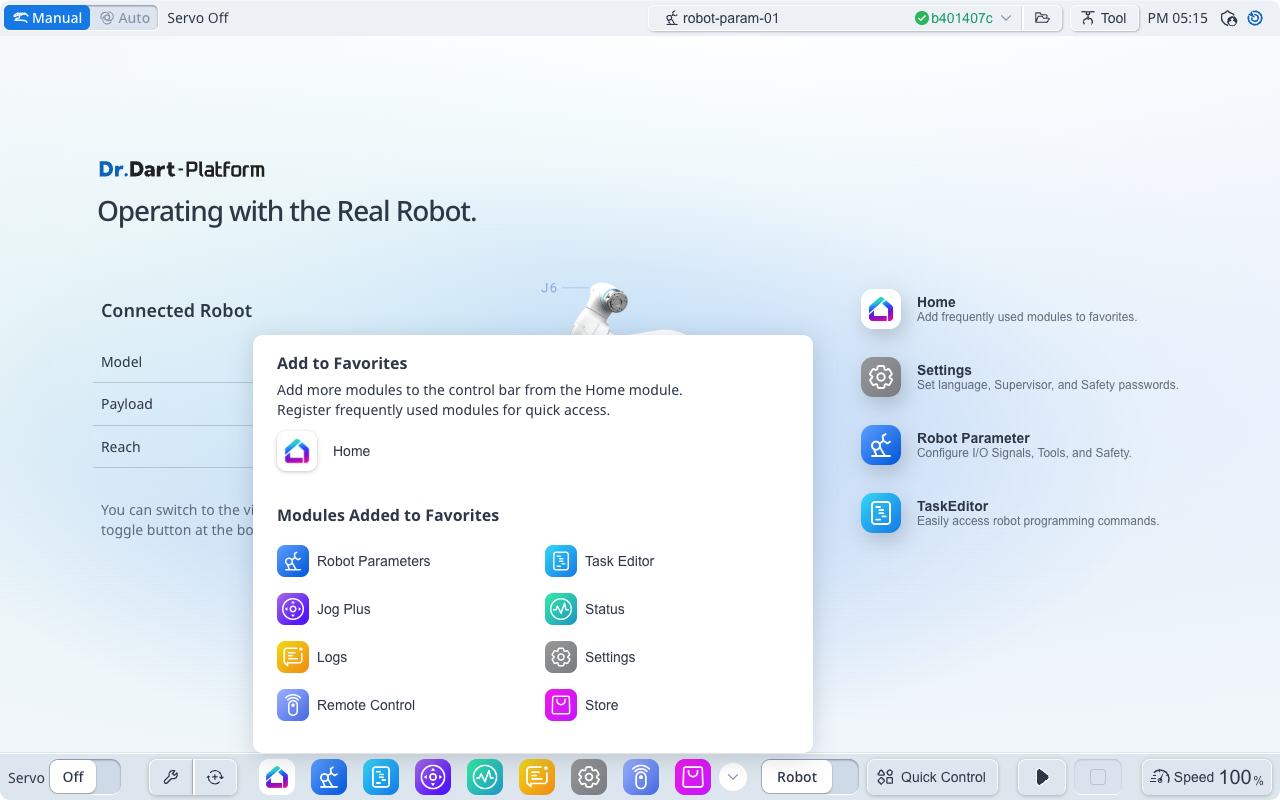 |
| 3 | Installez le module | Vous pouvez installer le module en sélectionnant le fichier d'installation du module téléchargé (*.dm). |
| 4 | Modules | Les icônes des modules exécutables s'affichent. |
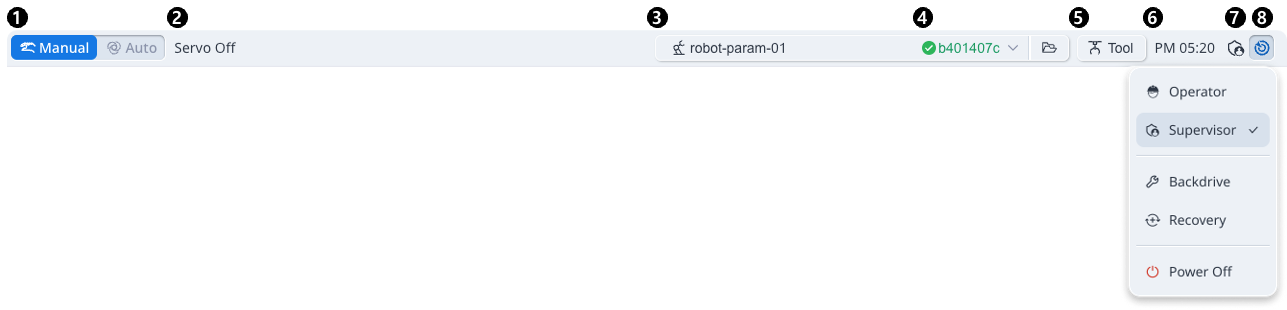
Vue d'ensemble de l'en-tête
Éléments | Description | |
|---|---|---|
| 1 | Commutateur de mode robot | Il peut être modifié en Auto ↔︎ Manuel. |
| 2 | État du robot | Voir le lien |
| 3 | Fichier de Robot Parameter | Affiche le nom du fichier de paramètres du robot actuellement défini. Si la valeur de réglage du fichier de paramètres du robot ne correspond pas aux informations définies dans le contrôleur, elle s'affiche comme ci-dessous. 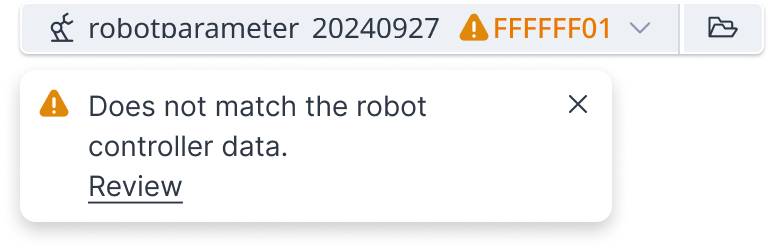 |
| 4 | Somme de contrôle de sécurité | Les informations de somme de contrôle pour les paramètres du robot définis dans le contrôleur sont affichées. |
| 5 | Réglage de l'outil | C'est ici que le TCP, le poids de l'outil et la forme de l'outil peuvent être définis. 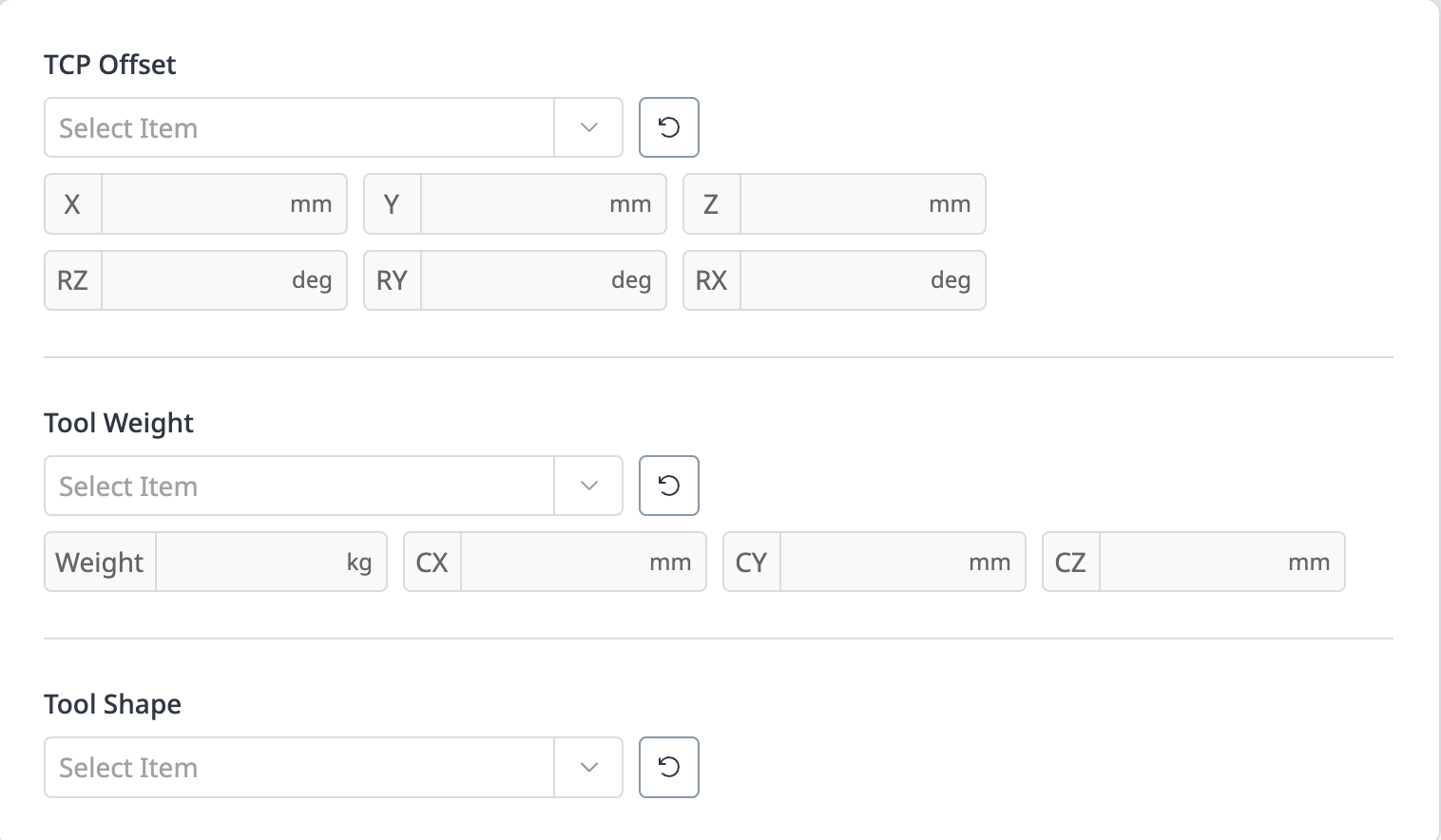 |
| 6 | Informations sur l'heure actuelle | L'heure actuelle est visible. |
| 7 | Autorité utilisateur | Affiche les informations relatives aux droits d'utilisateur actuellement définis (opérateur/superviseur). |
| 8 | Menu | Cliquez sur le MENU bouton pour afficher les menus suivants :
|
Présentation du pied de page
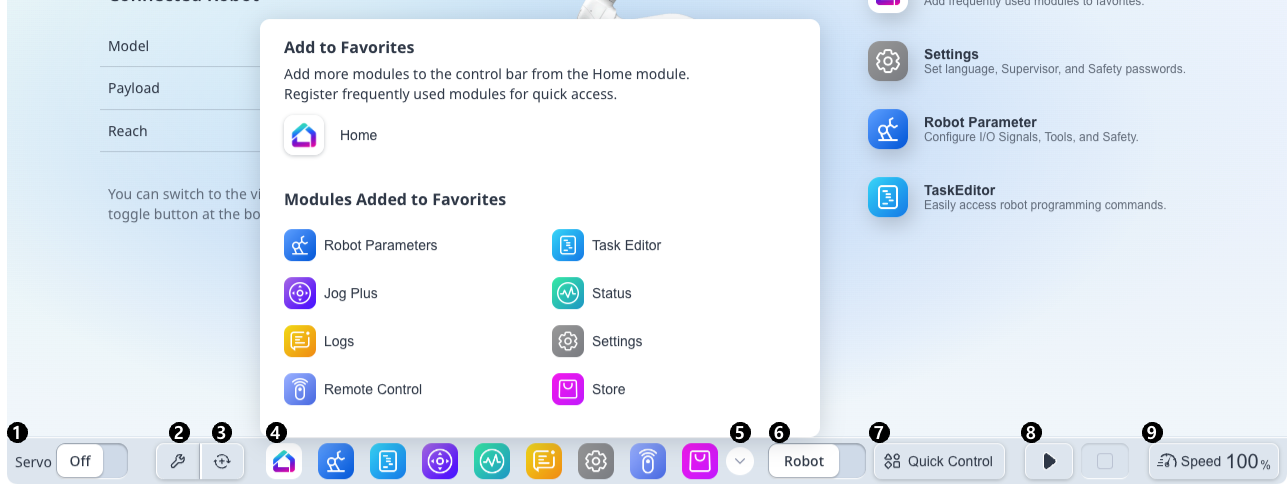
Éléments | Description | |
|---|---|---|
| 1 | Commutateur servo | Le servo peut être activé ou désactivé. |
| 2 | Backdrive | Exécutez le module Backdrive. |
| 3 | Recovery | Recovery : Exécutez le module Recovery. |
| 4 | Modules favoris | Les modules favoris que vous avez configurés dans le module Accueil s'affichent. ※ Le module Home est toujours affiché. |
| 5 | Fenêtre contextuelle modules favoris | Vous pouvez afficher tous les modules favoris et changer l'ordre pour glisser-déposer. |
| 6 | Robot / virtuel commutateur | Vous pouvez basculer entre le mode Robot ↔︎ Mode virtuel. ※ Il ne peut être utilisé que si le robot réel est connecté. |
| 7 | Contrôle rapide | Vous pouvez activer/désactiver les fenêtres contextuelles qui fournissent les fonctions 3D Simulator, avance et Tableau de bord. |
| 8 | Contrôle du programme | Fournit des boutons de commande pour lire, mettre en pause, reprendre et arrêter les programmes DRL/Task. |
| 9 | Régulateur de vitesse | Les informations relatives à la vitesse actuelle du robot s'affichent et la fenêtre contextuelle de changement de vitesse vous permet de modifier la vitesse du robot.  |