
Configuration et description du système robot
Liste des composants
 |  |
Manipulateur | Contrôleur (en option (en option : voir annexe) |
 |  |
Boîtier d'apprentissage | Câble d'alimentation du contrôleur |
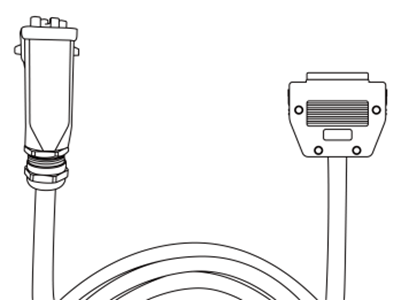 |  |
Câble de connexion du manipulateur | Manuel d'utilisation / guide rapide |
Nom de chaque pièce et fonctions
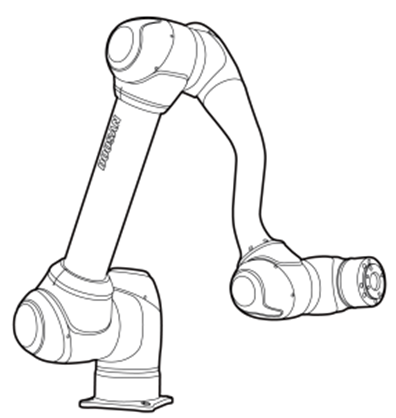
Manipulateur

Nom de chaque pièce
No. | Nom | No. | Nom |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Link2 |
3 | J2 | 8 | J5 |
4 | Link1 | 9 | J6 |
5 | J3 | 10 | Bride d'outil |
ㅤ
Fonctionnalités clés

No. | Éléments | Description |
|---|---|---|
1 | Cockpit | [Facultatif] boutons de commande pour l'apprentissage et l'utilisation directs |
2 | Bride d'outil | Zone d'installation des outils. |
3 | 3 | Affiche l'état du robot avec différentes couleurs. Pour plus d'informations sur l'état du robot, reportez-vous à la section Couleur des voyants d'état et de bride pour chaque mode. Version : H Series La série H est fournie avec une LED supplémentaire sur l'axe 1 indiquant le même état et la même couleur. |
4 | E/S de bride | Port d'E/S pour le contrôle des outils. |
5 | Connecteur | Utilisé pour alimenter et communiquer le robot. |
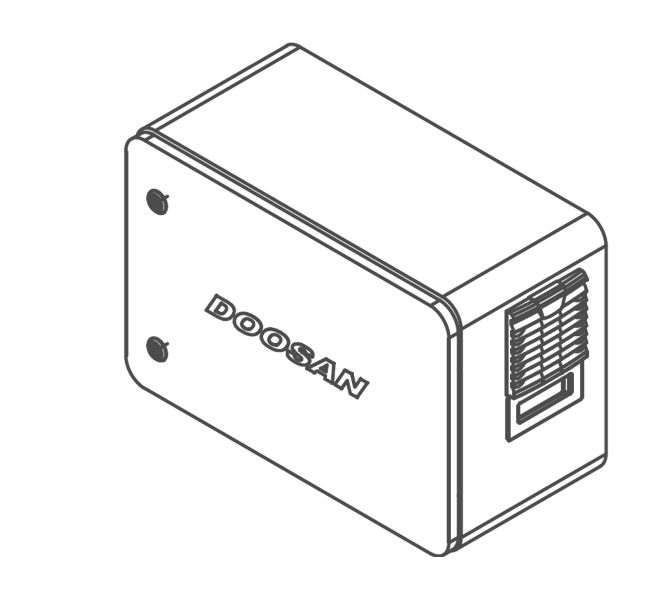
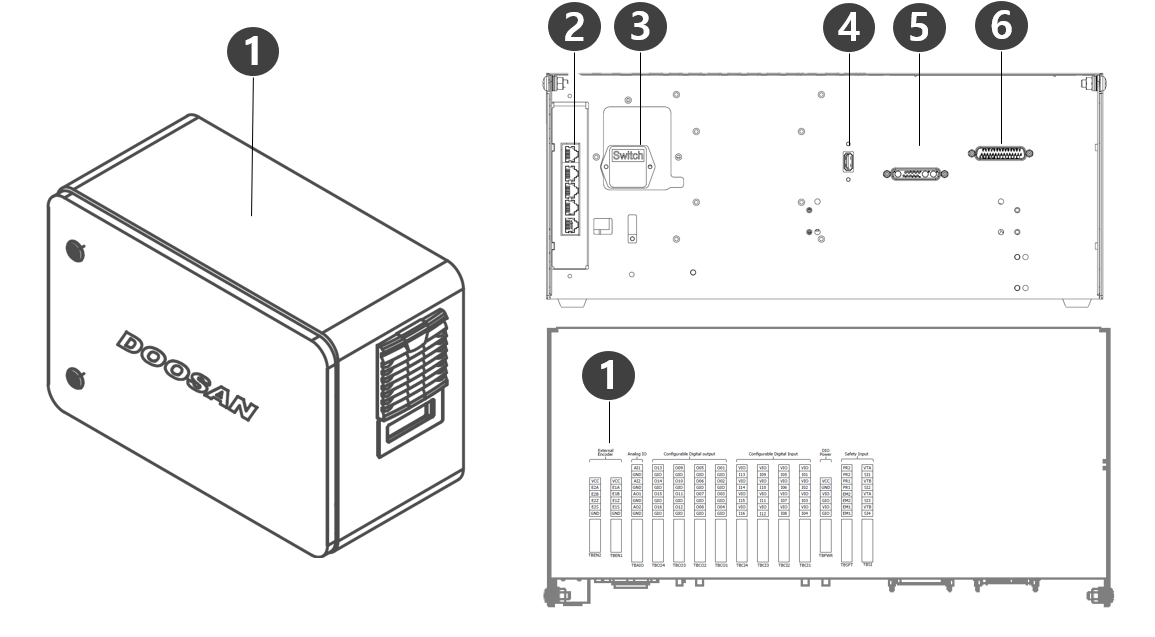
Contrôleur
No. | Éléments | Description |
|---|---|---|
1 | Borne de connexion E/S (interne) | Il peut être connecté aux contrôleurs ou périphériques d'autres robots. |
2 | Terminal de connexion réseau | Utilisé pour la connexion au terminal de connexion réseau à l'intérieur du contrôleur afin d'utiliser des ordinateurs portables, des périphériques TCP/IP et des équipements Modbus. |
3 | Borne/interrupteur de connexion d'alimentation | Utilisé pour connecter l'alimentation secteur du contrôleur pour l'allumer ou l'éteindre. Pour plus d'informations, reportez-vous à la section Mettez le système sous/hors tension. |
4 | Borne de connexion USB | Utilisé pour stocker les journaux créés pendant que le robot fonctionne dans le stockage USB, ou les tâches d'exportation et d'importation. |
5 | Borne de connexion du câble du manipulateur | Utilisé pour connecter le câble du manipulateur au contrôleur. |
6 | Terminal de connexion du câble du boîtier d’apprentissage | Utilisé pour connecter le câble du boîtier d’apprentissage au contrôleur. |
Remarque
Si vous choisissez un contrôleur en option, consultez le manuel d'utilisation en annexe pour vous connecter avant utilisation.
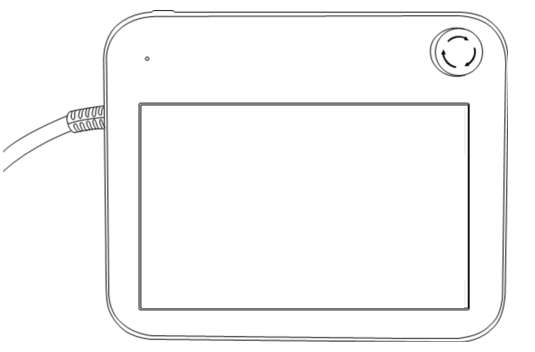
Boîtier d'apprentissage

No. | Éléments | Description |
|---|---|---|
1 | Bouton Marche/arrêta |
|
2 | Voyant d'alimentation |
|
3 | Bouton d'arrêt d'urgence |
|
4 | Bouton de guidage manuel (commutateur d'activation 3 positions 3PE) |
|
Remarque
Si le pendentif d'apprentissage doit être protégé et monté pendant le fonctionnement, le couvercle souple fourni par nous le rend plus sûr et plus facile à utiliser.
Nouveau TP (TP-02) fonction ajoutée : Guide manuel double fonction
Le TP existant (TP-01) ne peut pas être utilisé dans le contrôleur intégré. (Schéma des broches modifié en raison du commutateur 3PE)
Le nouveau TP (TP-02) peut être utilisé dans le contrôleur existant, mais la LED est changée en une seule couleur (rouge) et affichée, et des fonctions supplémentaires ne peuvent pas être utilisées.
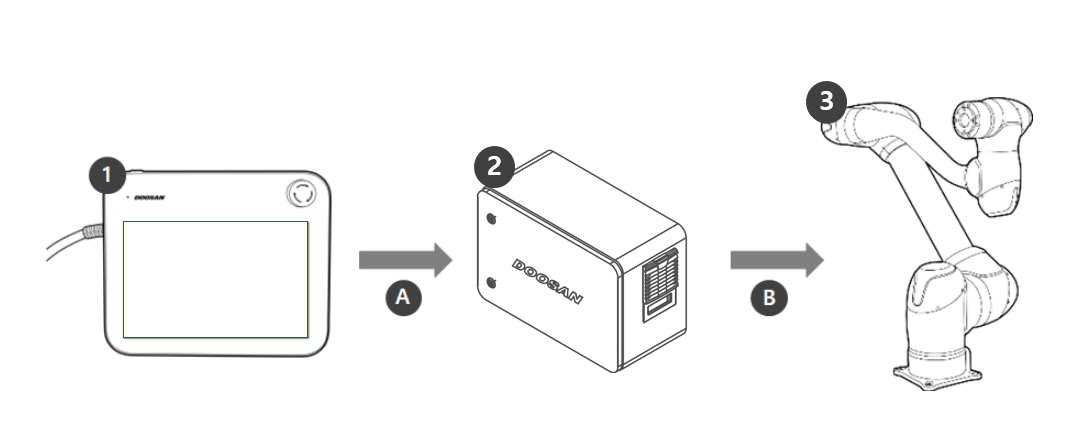
Configuration du système
No. | Nom | Description |
|---|---|---|
1 | Boîtier d'apprentissage | Ce dispositif gère l'ensemble du système et est capable d'apprendre au robot des poses spécifiques ou de faire des réglages liés aux manipulateurs et aux contrôleurs. |
2 | Contrôleur | Il contrôle les mouvements du robot en fonction de la pose ou des déplacements définis par le boîtier d’apprentissage. Il dispose de divers ports d'E/S qui permettent la connexion et l'utilisation de divers équipements et périphériques. |
3 | Manipulateur | C’est un robot collaboratif industriel qui peut effectuer des tâches de transport ou d’assemblage avec divers outils. |
A | Commande/surveillance | |
B | Alimentation/réseau |