Démarrage initial
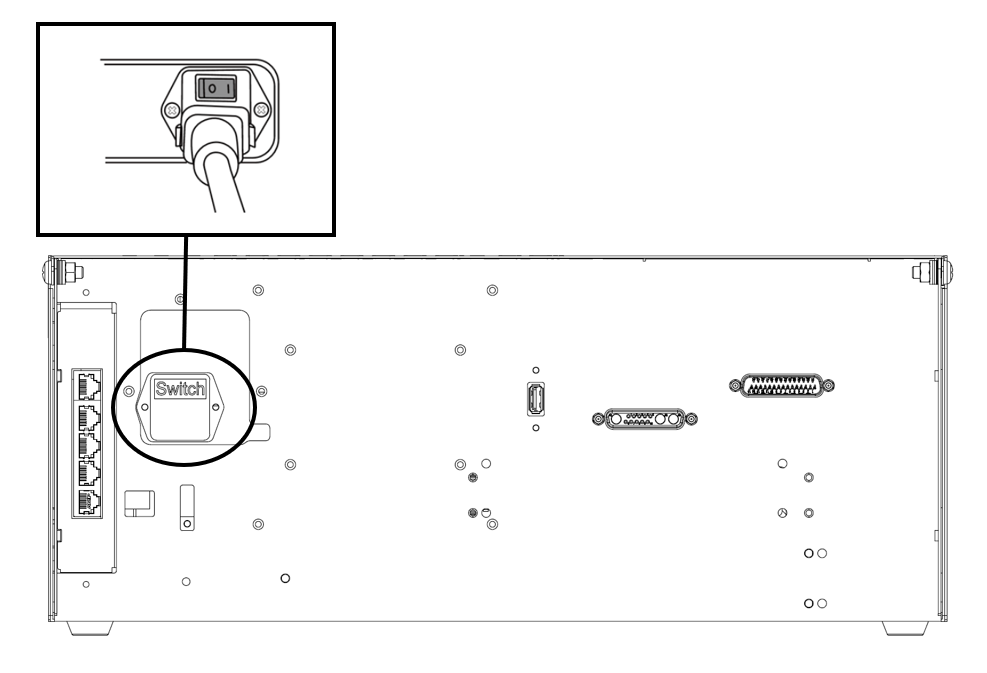
Mettez le contrôleur sous tension
OBLIGATOIRE FACILE 1 MIN
Appuyez sur le bouton d'alimentation situé au bas du contrôleur. L'alimentation des systèmes tels que le robot, le contrôleur et la Boîtier d'apprentissage est activée.
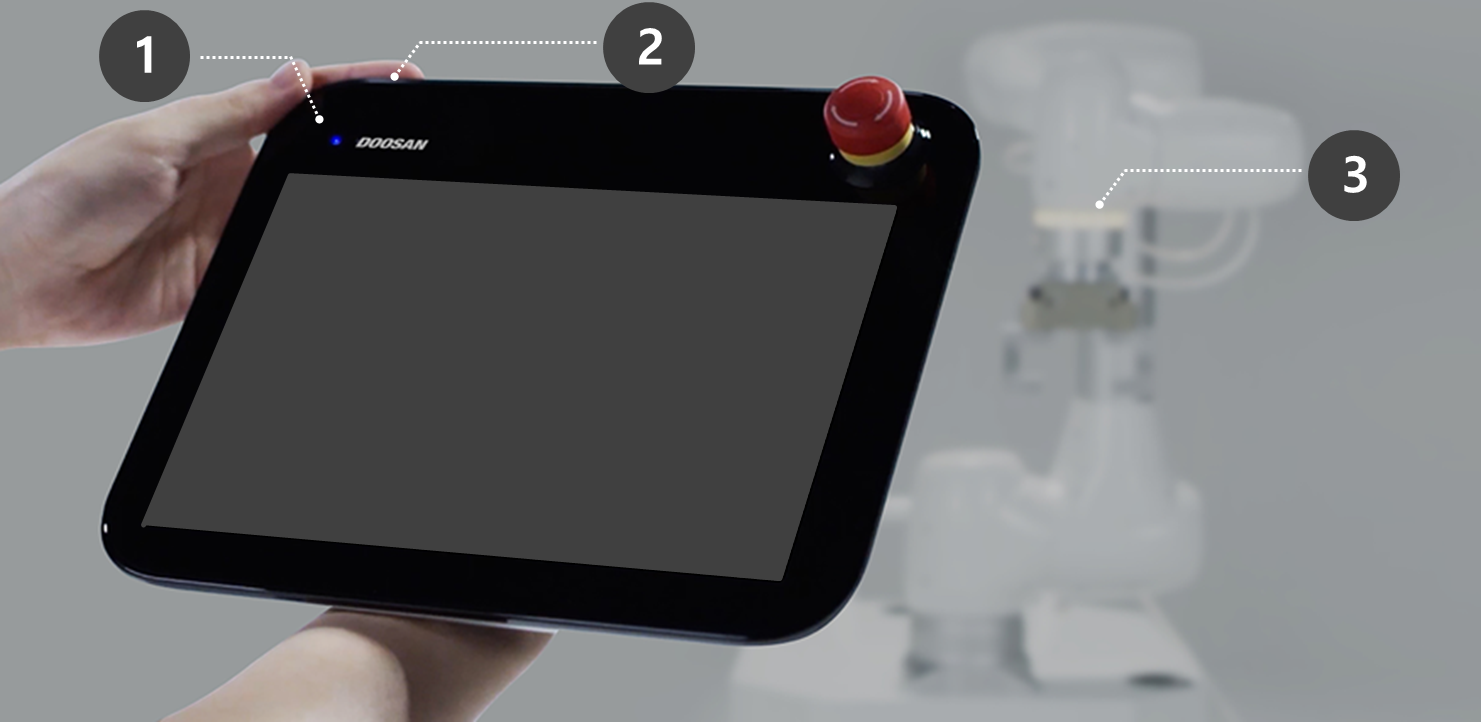
Appuyez et maintenez le bouton d’alimentation (Fig. 2) jusqu’à ce que l’écran du boîtier d’apprentissage s’allume. La LED du boîtier d’apprentissage (Fig. 1) et la LED de la bride (Fig. 3) clignoteront en rouge jusqu’à ce que le contrôleur du robot se connecte au réseau.\
ㅤ
ㅤ
Pour plus d’informations sur les équipements autres que le boîtier d’apprentissage, consultez la section Mise sous/hors tension du système.
Remarque
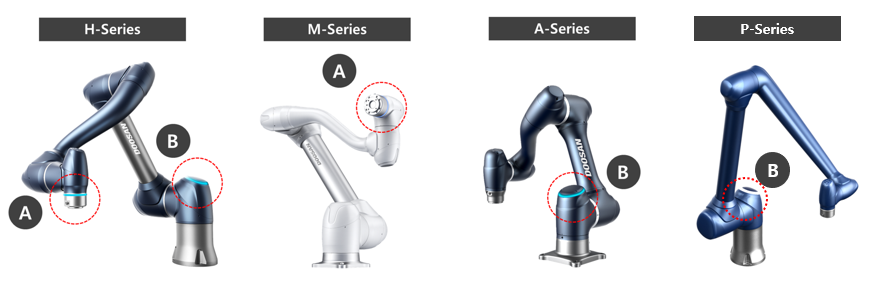
Les positions des LED de chaque série de robots Doosan Robotics sont les suivantes :
A : LED de bride
B : LED axe 1
Désengager le bouton d'arrêt d'urgence
OBLIGATOIRE FACILE 1 MIN
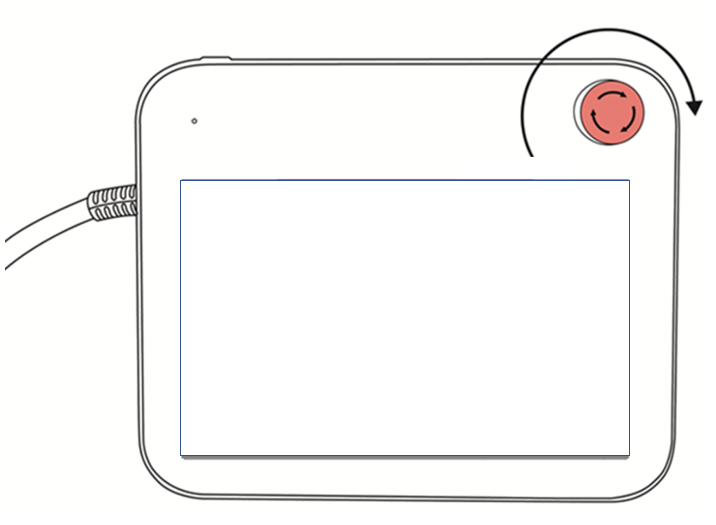
Après l’installation du robot et après le démarrage initial du système, une fenêtre d’avertissement s’affiche lorsque le bouton d’arrêt d’urgence du boîtier d’apprentissage est enfoncé. Le bouton d'arrêt d'urgence doit être désengagé pour faire fonctionner le robot.
Tournez le bouton d'arrêt d'urgence dans le sens des aiguilles d'une montre pour désactiver l'état d'arrêt d'urgence.
Désengagez la pose de l'emballage
OBLIGATOIRE FACILE 3 MIN
Le robot est dans sa pose d'emballage pour permettre un transport ou un emballage facile. Pour utiliser le robot, il est nécessaire de dégager la pose d'emballage. Comme le robot maintient une pose qui dépasse la limite d'angle de joint lors de la pose d'emballage, il est impossible de définir l'état Servo on en raison d'une violation de la limite de sécurité. La LED du robot est allumée en rouge dans cet état.
Remarque
S'il existe un cas dans lequel vous devez emballer le robot en raison d'un déplacement, définissez la pose du paquet en utilisant déplacer avec la pose du paquet dans le mode emballage.
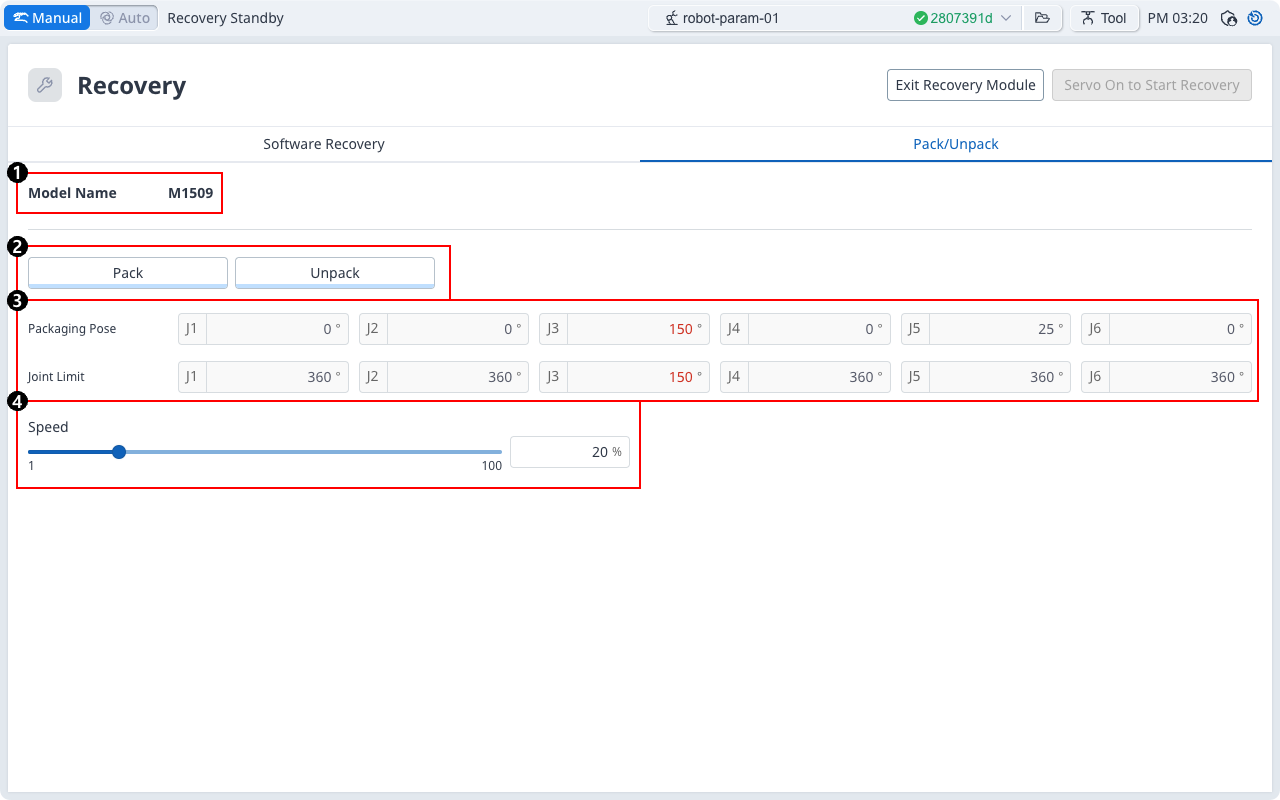
Éléments | Description | |
|---|---|---|
| 1 | Model Name | Le nom du modèle de robot connecté s'affiche. |
| 2 | Emballer/déballer | Vous pouvez sélectionner Emballer ou déballer. |
| 3 | Position d’emballage / Joint Limit | Les valeurs limites de pose et d'articulation s'affichent. |
| 4 | Rapport de vitesse | La vitesse du mode pack ou déballage peut être ajustée via un curseur ou une entrée. |
Le processus de configuration de la pose d'emballage est le suivant :
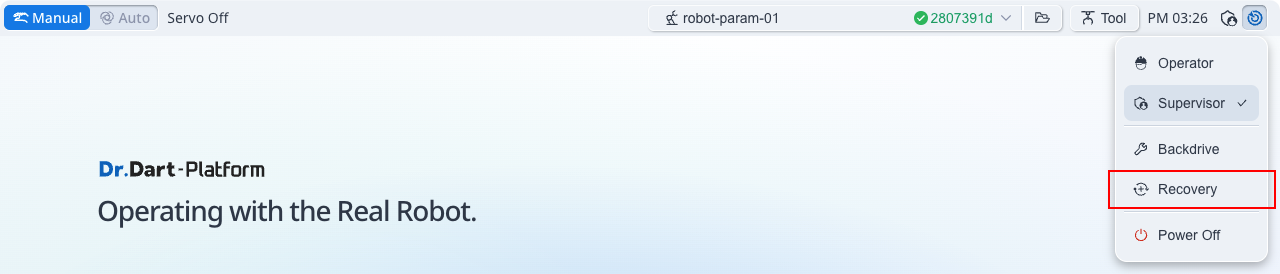
Appuyez sur le menu Recovery dans le volet d'en-tête.
Sélectionnez l' onglet Packaging mode.

Appuyez sur le bouton Servo on to Start Recovery pour activer le mode packaging.

Le robot se déplace automatiquement vers la pose d'emballage définie.
Le bouton Pack vous permet de placer le robot en position Pack et le bouton Unpack vous permet de placer le robot en position initiale par défaut.
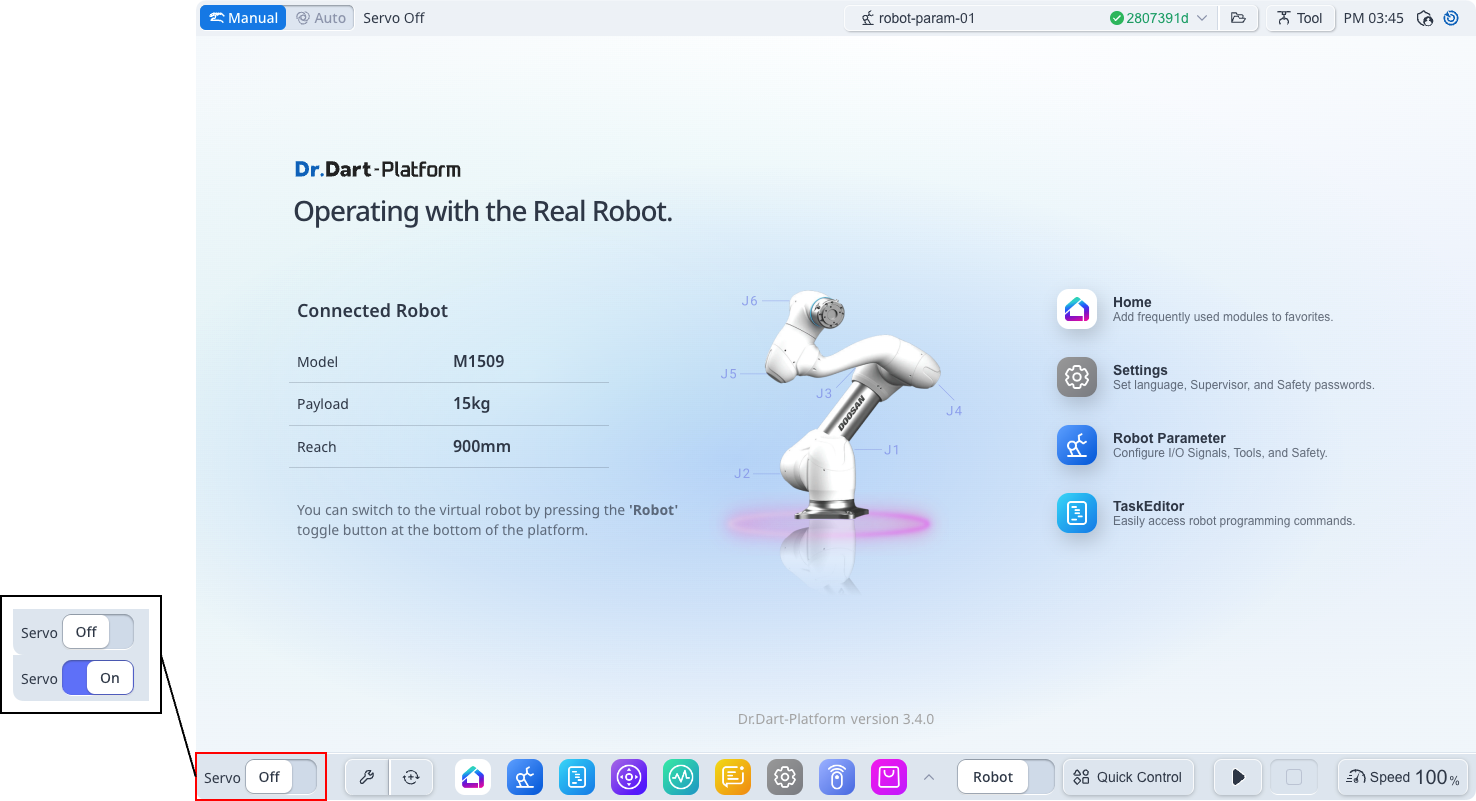
Servo désactivé
OBLIGATOIRE FACILE 1 MIN
L'état servo on est l'état où le robot est prêt avec l'alimentation fournie aux articulations du robot pour modifier la pose du robot.
Appuyer sur le bouton Servo Off pour couper l'alimentation des articulations du robot et arrêter le robot. Pour plus d'informations, reportez-vous à la section Vue d'ensemble de la fonction Servo on.