
Spécifications du robot
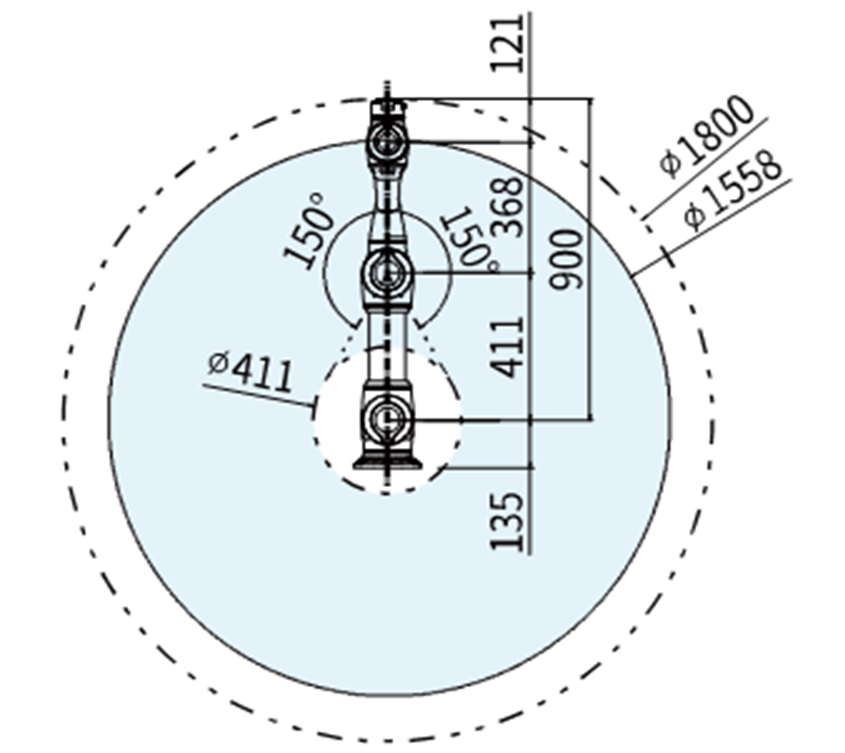
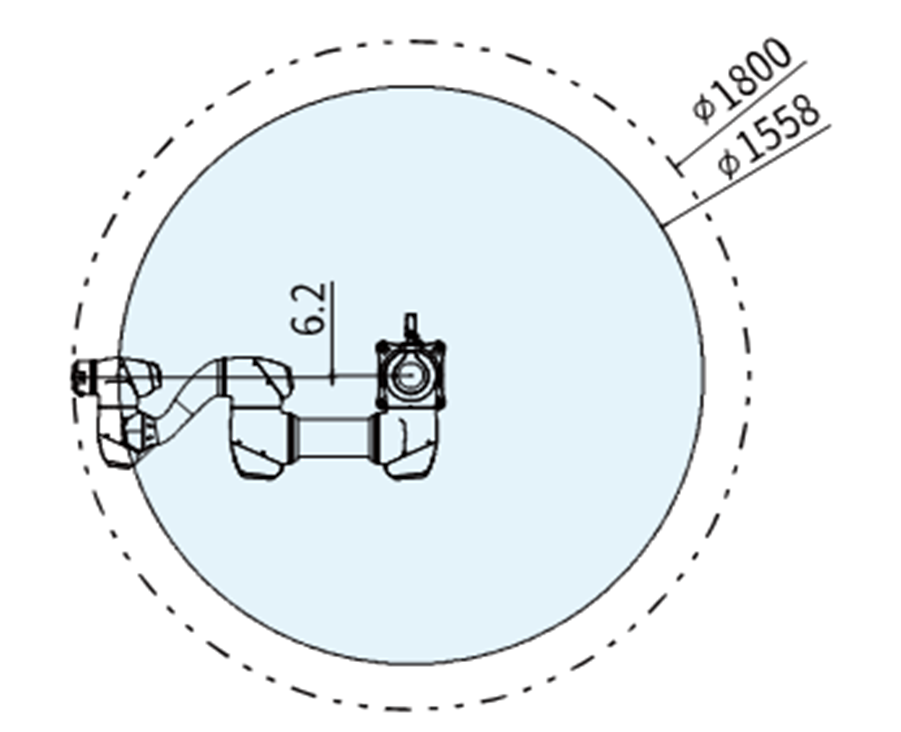
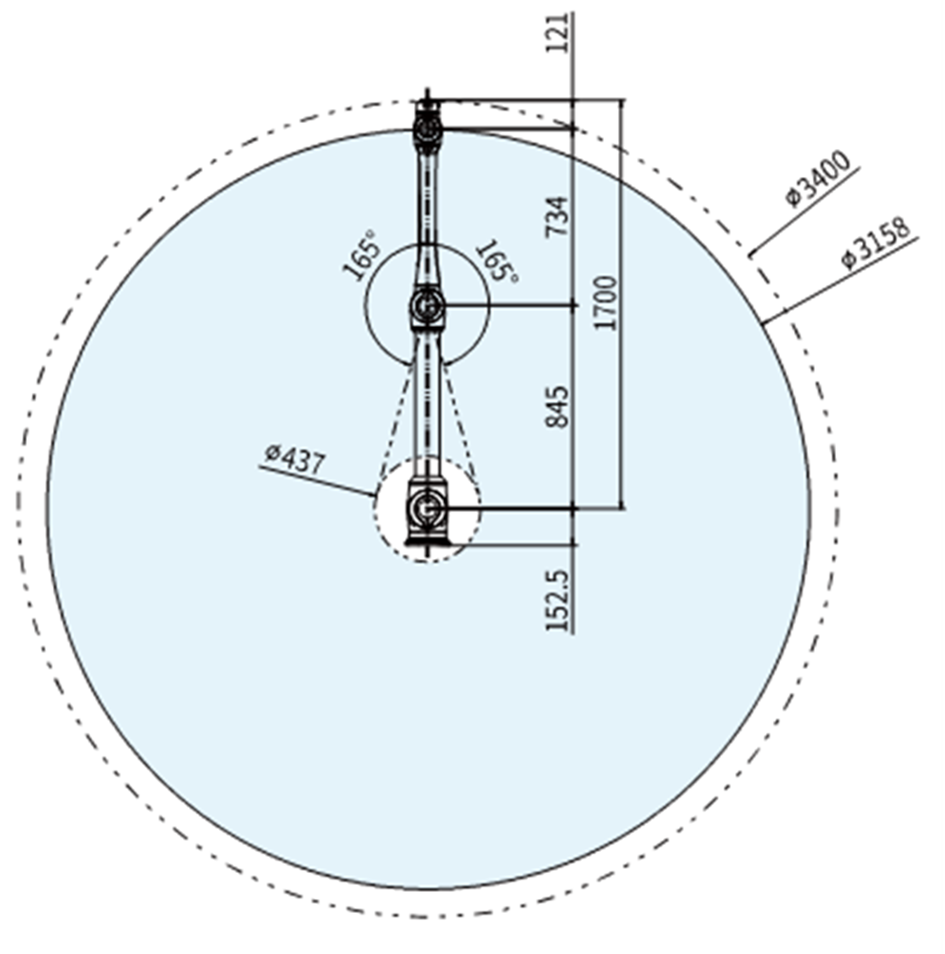
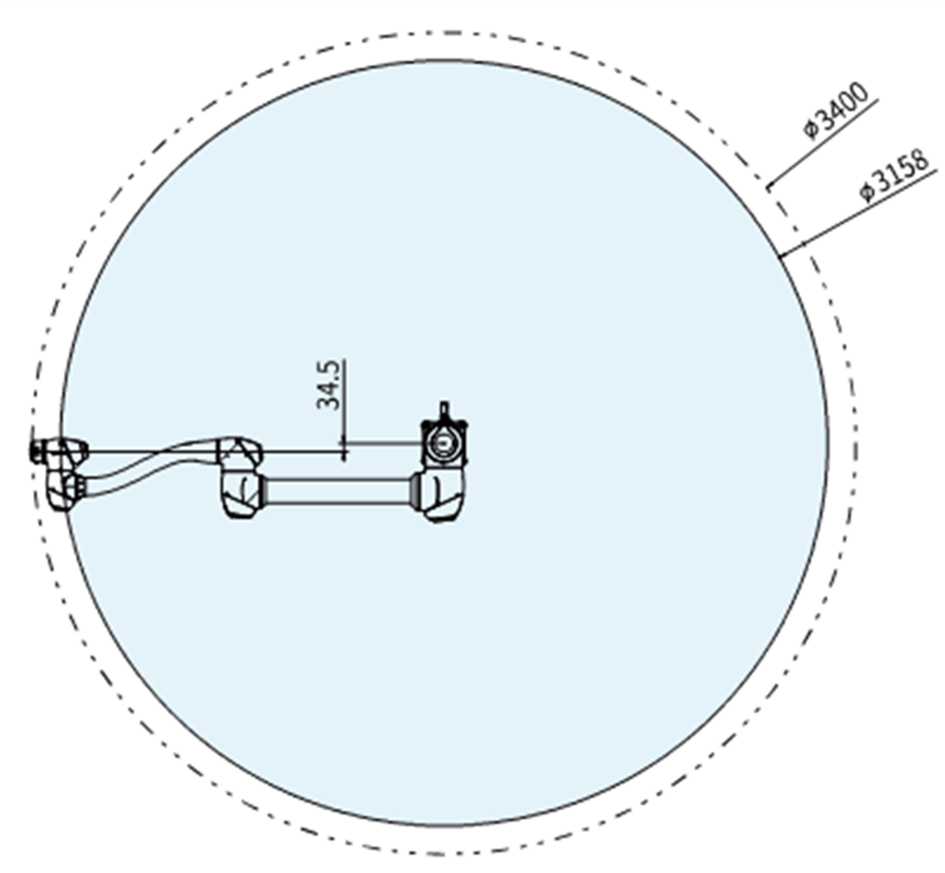
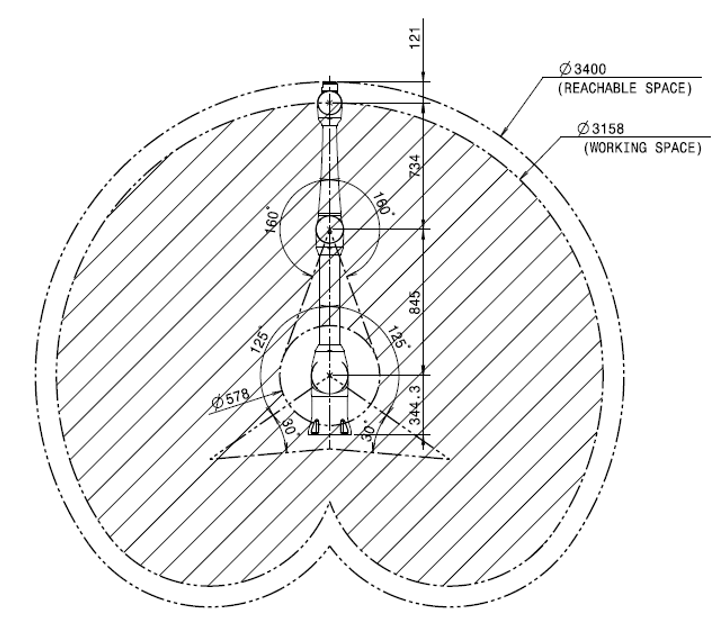
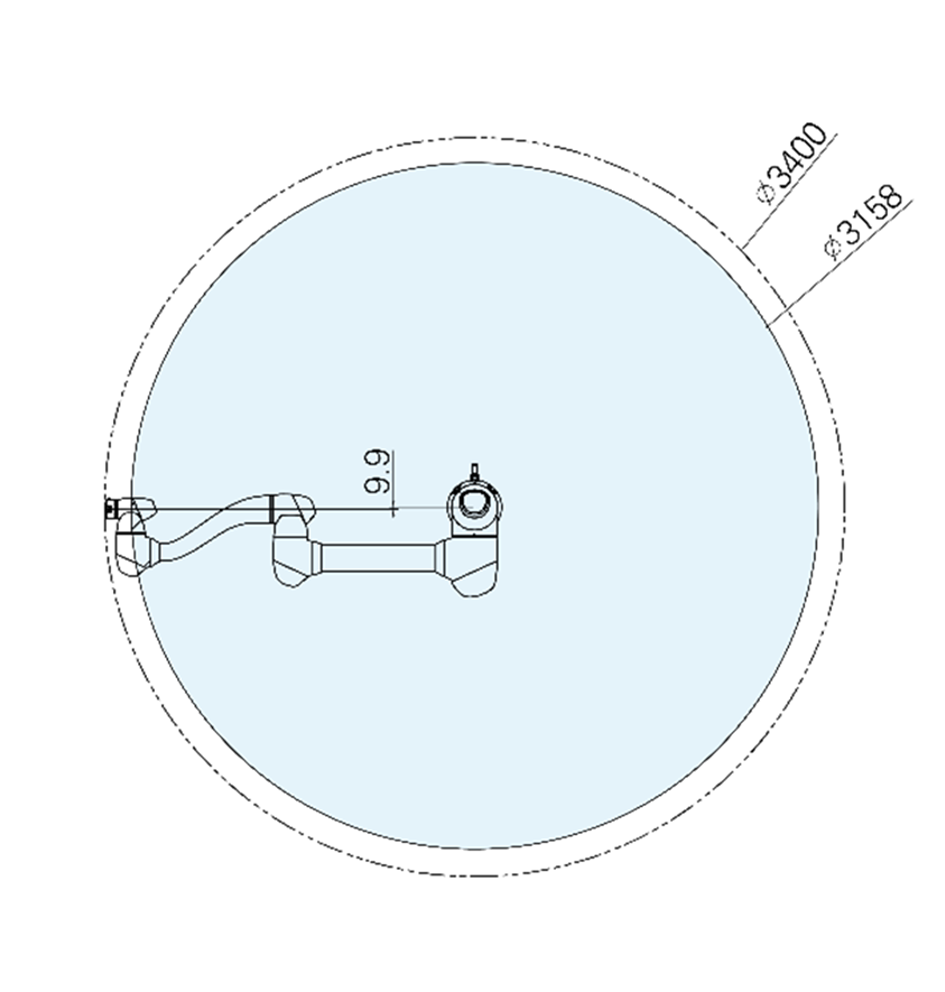
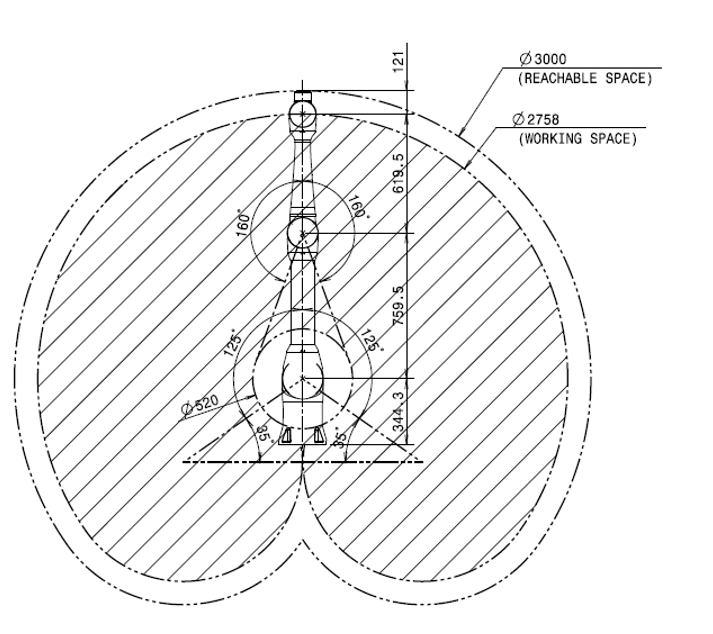
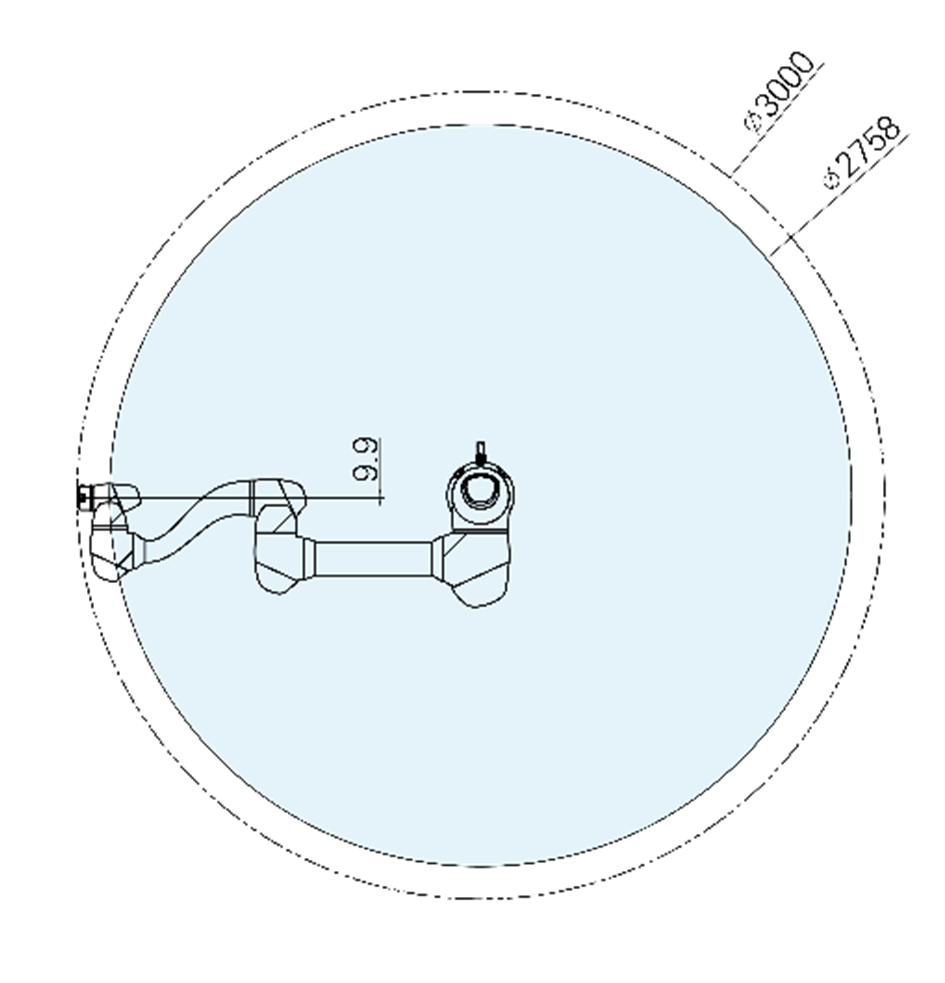
Espace de fonctionnement du robot
M0609
 |  |
M0617
 |  |
M1013
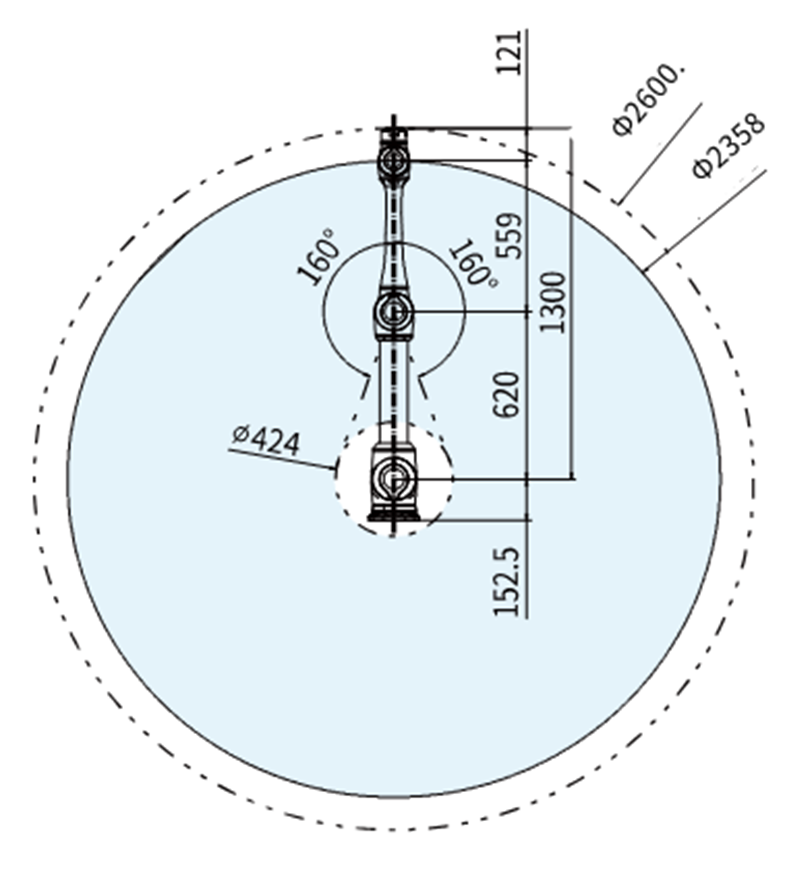 | 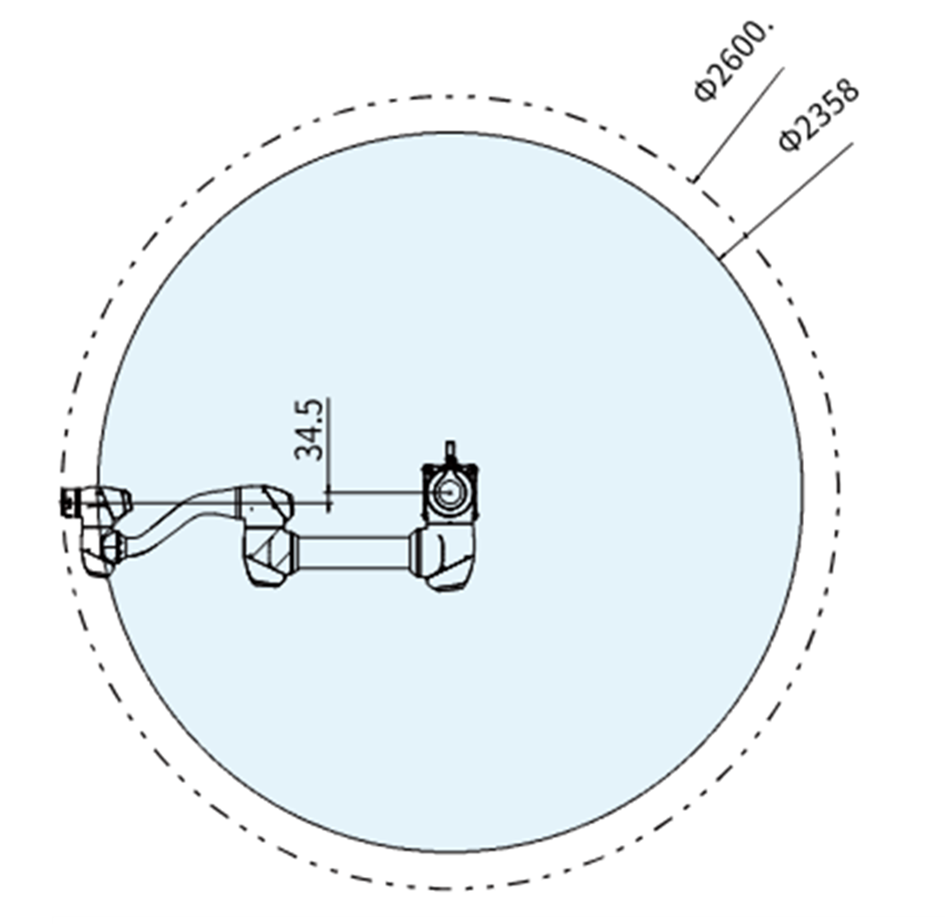 |
M1509
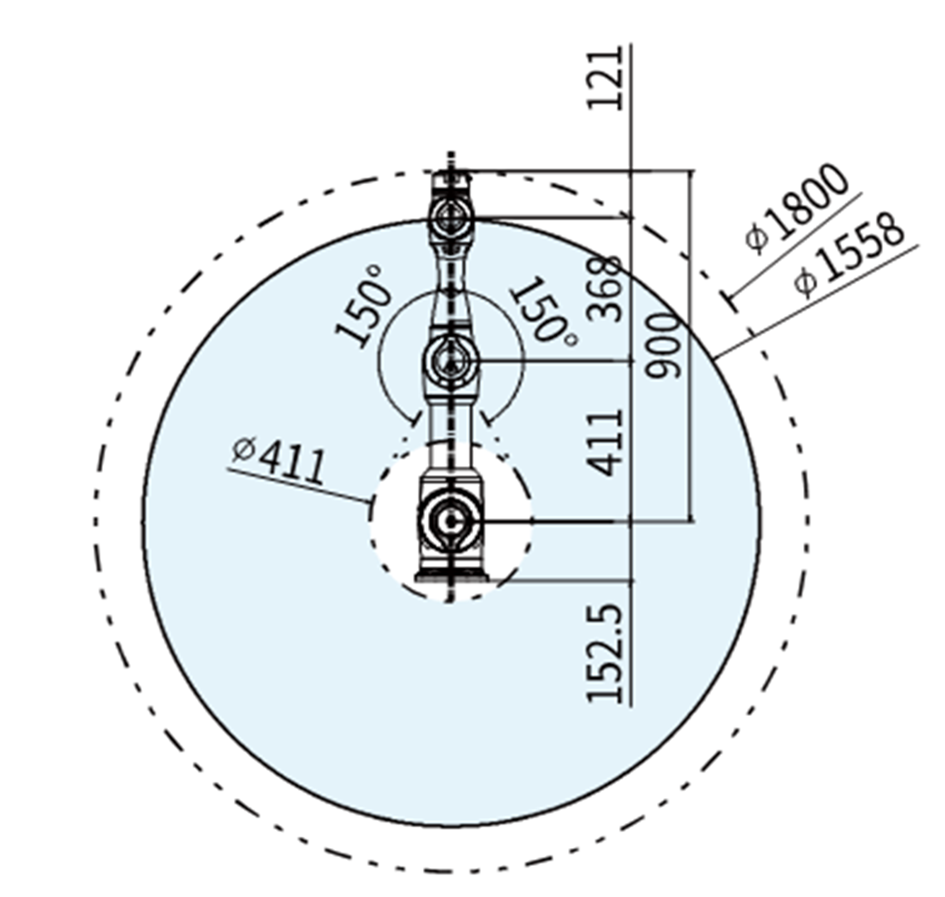 | 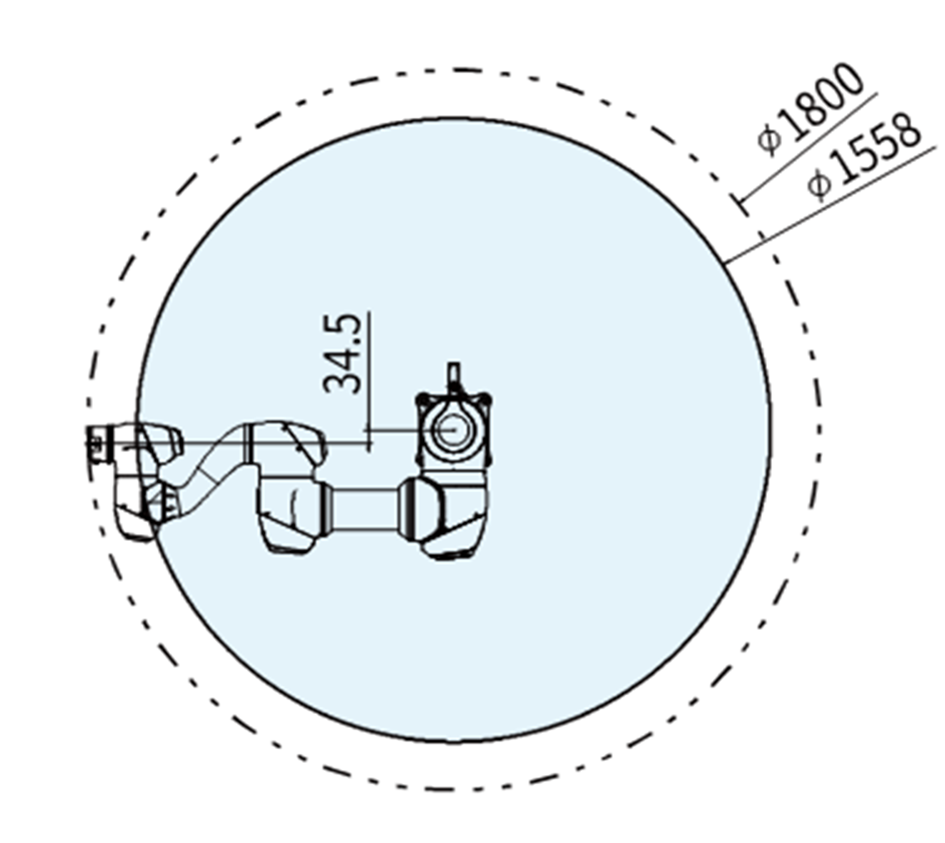 |
H2017
 |  |
H2515
 |  |
Max. Charge utile dans l'espace de fonctionnement
La charge utile maximale du robot dans son espace de travail varie en fonction de la distance par rapport au centre de gravité. La charge utile par distance est la suivante :
Remarque
Ce diagramme de charge suppose un petit volume de charge d'outil. Les outils avec un volume plus important auront des limitations plus importantes de charge utile au-dessus du centre de gravité de l’outil par rapport à un outil avec un poids égal mais un volume plus petit, et dans de tels cas, des vibrations peuvent se produire.
M0609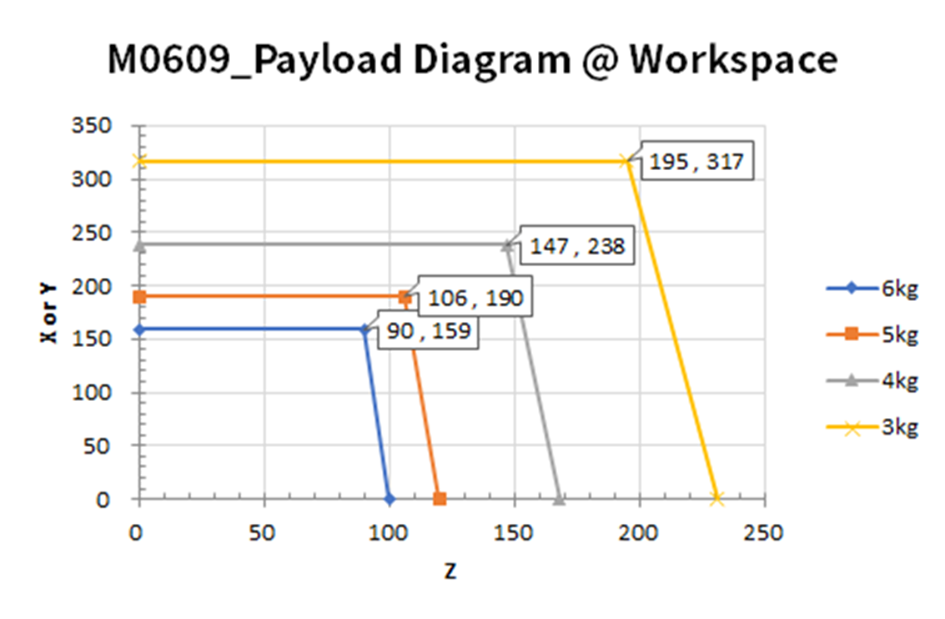 | M0609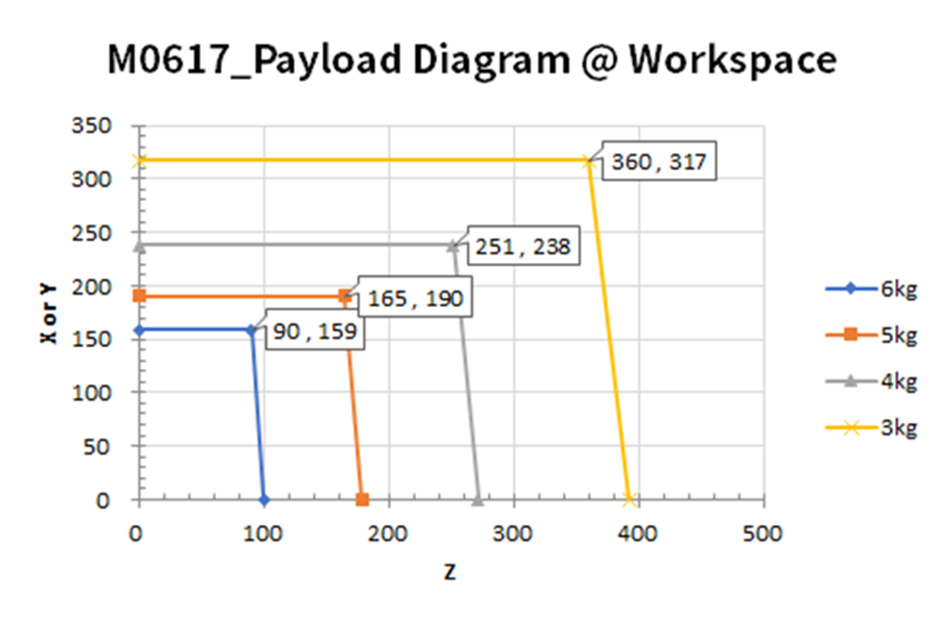 |
M1013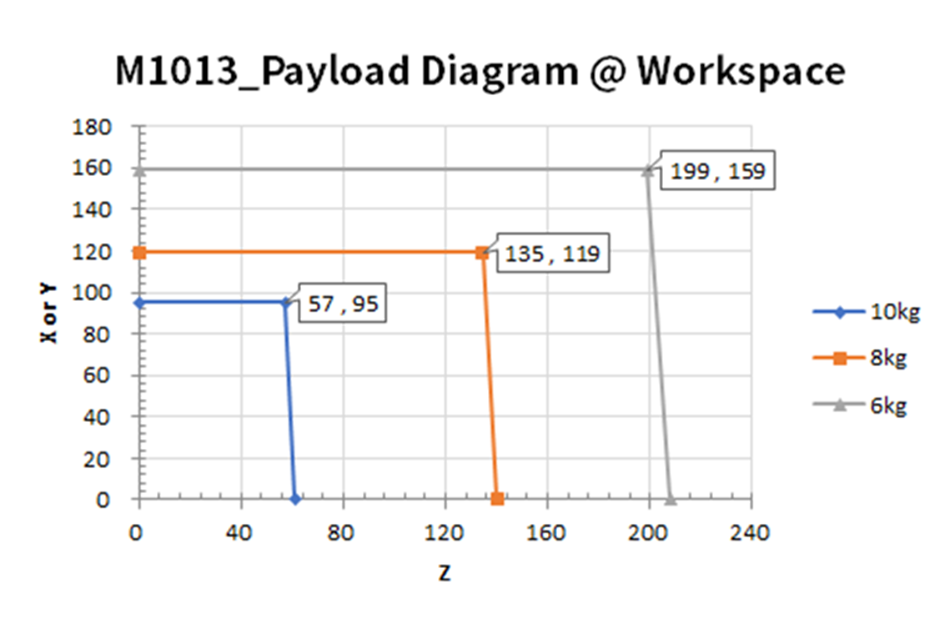 | M1509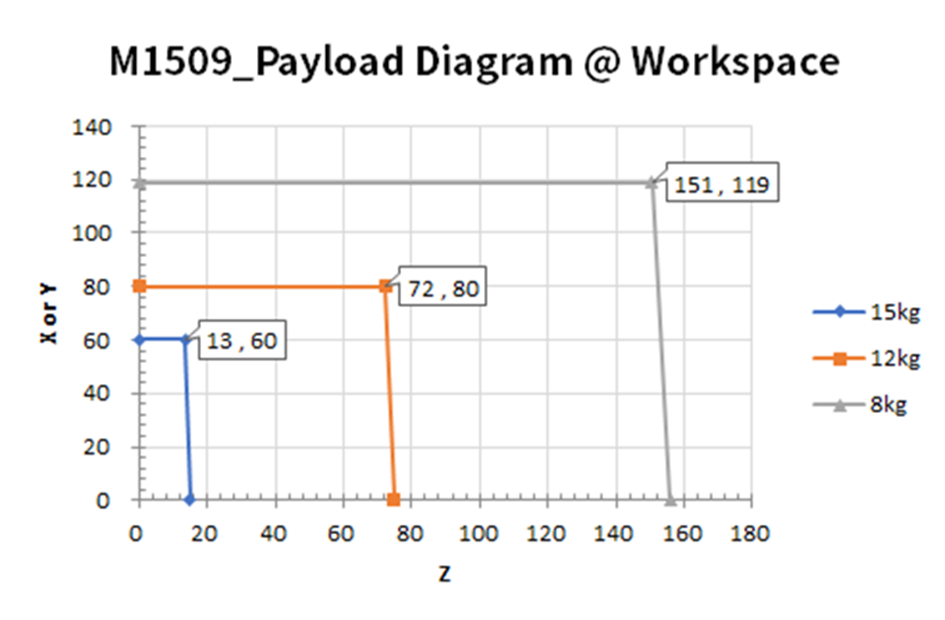 |
H2017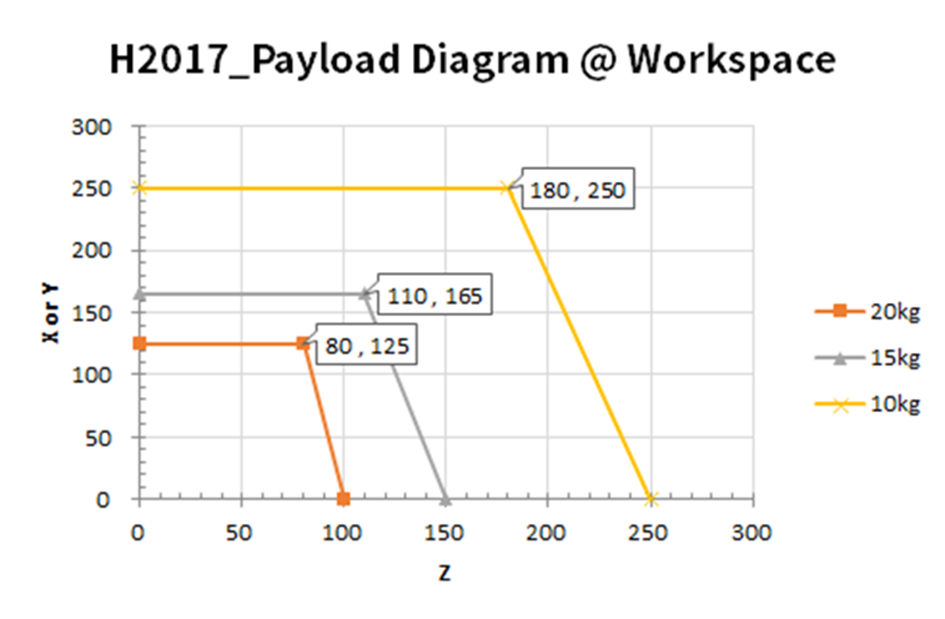 | H2515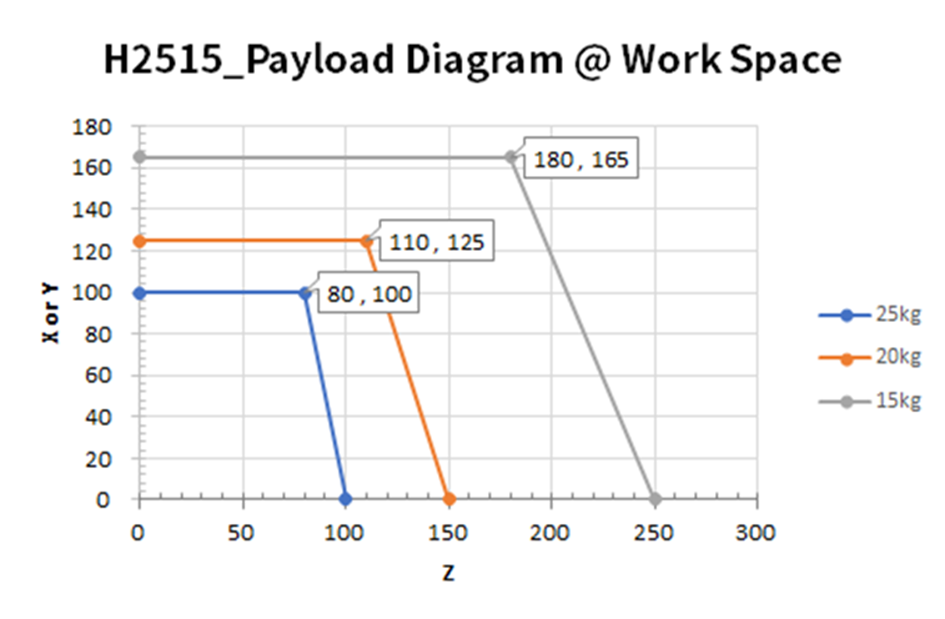 |
Moment et inertie autorisés
Le moment et l'inertie autorisés pour J4-J6 du robot sont les suivants :
Model Name | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Moment autorisé | Inertie | Moment autorisé | Inertie | Moment autorisé | Inertie | |
M0609 | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ | 36 Nm | 1.6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8.0 kg㎡ | 81 Nm | 4.5 kg㎡ | 36 Nm | 2.0 kg㎡ |
H2515 | ||||||
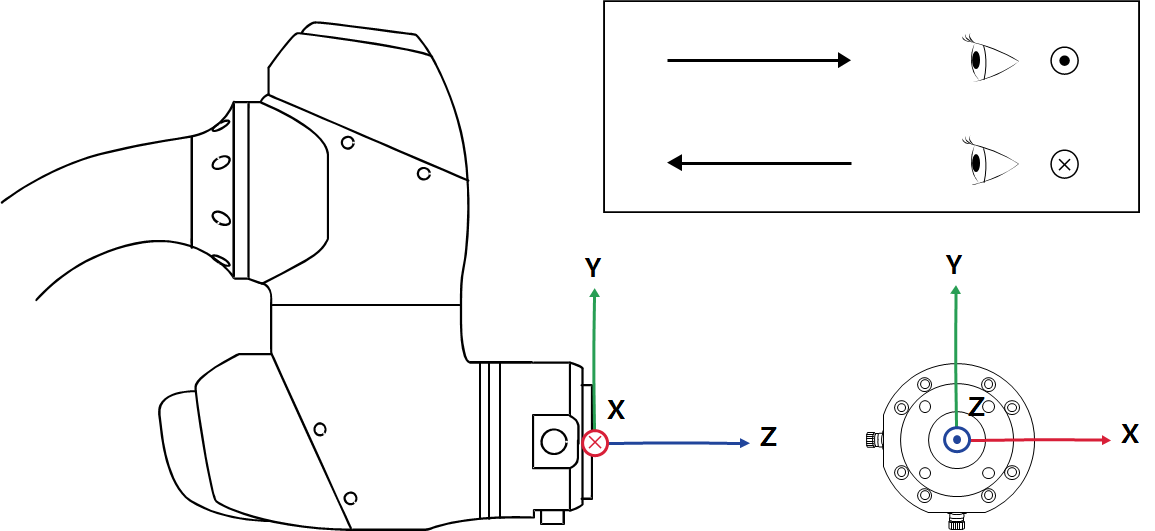
Point central de l'outil (TCP)
Reportez-vous à la figure ci-dessous pour TCP.
Spécifications de base
Model Name | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Poids | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
Charge utile dans le rayon de travail | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
Max. Rayon de travail | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Nombre d'axes | 6 | ||||||
Max. Vitesse TCP | Plus de 1 m/s | ||||||
Répétabilité de position (ISO 9283) | ±0.03 mm | ±0.1 mm | ±0.05 mm | ±0.03 mm | ±0.1 mm | ||
Indice de protection | IP 54 | ||||||
Bruit | < 65 dB | ||||||
Sens d'installation | Toute orientation | Plancher seulement | |||||
Contrôleur et télécommande d'apprentissage | Doosan contrôleur & Boîtier d'apprentissage | ||||||
Vibrations et accélération | ㎐ amplitude de 10≤f < 57 - 0,075 mm 57≤f≤150㎐ – 1 G. | ||||||
Impact | Amplitude max. : 50㎨(5G)
| ||||||
Température de fonctionnement | 0 °C - 45 °C (273 K - 318 K) | ||||||
Température de stockage | -5 °C - 50 °C (268 K - 323 K) | ||||||
Humidité | 20 % ~ 80 % | ||||||
Spécifications de l'axe
Model Name | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
Angle de fonctionnement | ||||||
J1 | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) |
J2 | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±360° (TP:±95°) | ±125° (TP:±95°) | ±125° (TP:±95°) |
J3 | ±150° (TP:±125°) | ±165° (TP:±145°) | ±160° (TP:±135°) | ±150° (TP:±125°) | ±160° (TP:±135°) | ±160° (TP:±135°) |
J4 | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) |
J5 | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) | ±360° (TP:±135°) |
J6 | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) | ±360° (TP :±360°) |
Max. Vitesse par axe (fonctionnement avec charge utile nominale) | ||||||
J1 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 100 °/s | 100 °/s |
J2 | 150 °/s | 100 °/s | 120 °/s | 150 °/s | 80 °/s | 80 °/s |
J3 | 180 °/s | 150 °/s | 180 °/s | 180 °/s | 100 °/s | 100 °/s |
J4 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J5 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |
J6 | 225 °/s | 225 °/s | 225 °/s | 225 °/s | 180 °/s | 180 °/s |