
Étapes de fonctionnement du mode télécommande
1. Créer un programme
Vous devez créer un programme à contrôler à distance à l'avance.
Créez une tâche dans le module Editeur de tâches.
Enregistrez la tâche lorsque la création est terminée.
2. Paramètres obligatoires
Dans le module Remote Control, vous devez configurer les éléments requis suivants :
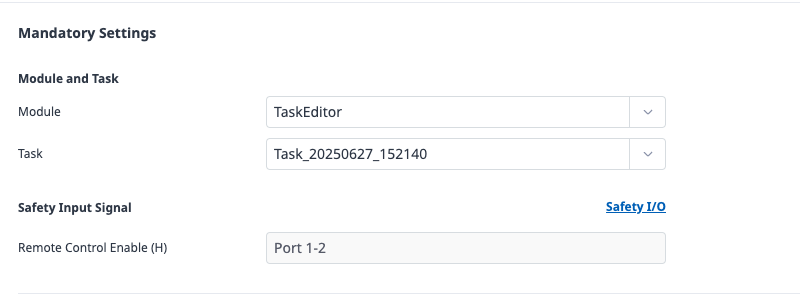
Sélectionnez modules et tâches
Sélectionnez le module et la tâche à exécuter dans la liste.
Spécifiez les signaux d'activation de la commande à distance
Dans le menu Safety I/O du module Robot Parameter, sélectionnez le signal Remote Control Enable et attribuez le port à utiliser.
Le mode Remote Control ne peut pas être exécuté si les paramètres requis ne sont pas complétés.
3. Paramètres avancés (facultatif)
Si nécessaire, vous pouvez spécifier des paramètres avancés.
Si elle n'est pas configurée, cette fonctionnalité reste désactivée et n'a aucun impact sur le fonctionnement de la télécommande.
Démarrer automatiquement au redémarrage

Lorsque cette option est activée, le système entre automatiquement dans l'écran de la télécommande lorsque le robot est mis sous tension.
Signaux de sortie de sécurité
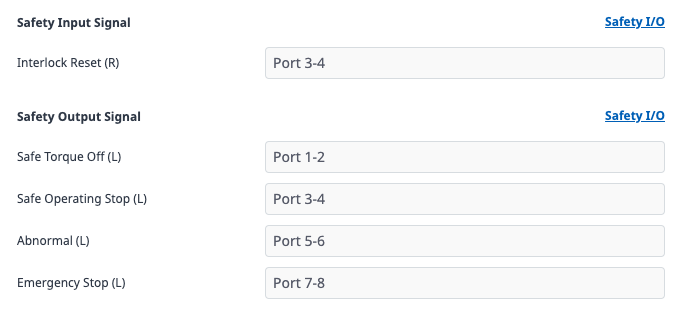
Attribuer des ports de sortie pour les signaux STO (Safe Torque Off) et SOS (Safely Operating Stop).
Remarque
Pour plus d'informations sur chaque signal, reportez-vous à la section E/S du signal de sécurité .
Signaux d'entrée de commande
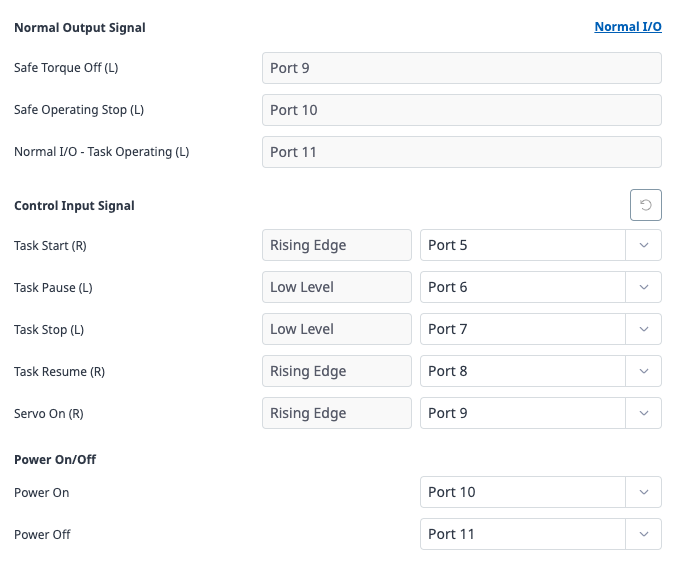
Définissez le port d'entrée numérique pour les commandes Start, Stop, Pause et Resume.
4. Activation du mode télécommande
Une fois la configuration terminée, vous pouvez passer en mode télécommande.
Dans l'écran Remote Control module, cliquez sur le bouton Start Remote Control.
5. Exécutez la commande à distance
Exécutez le programme désigné à distance et surveillez son état.
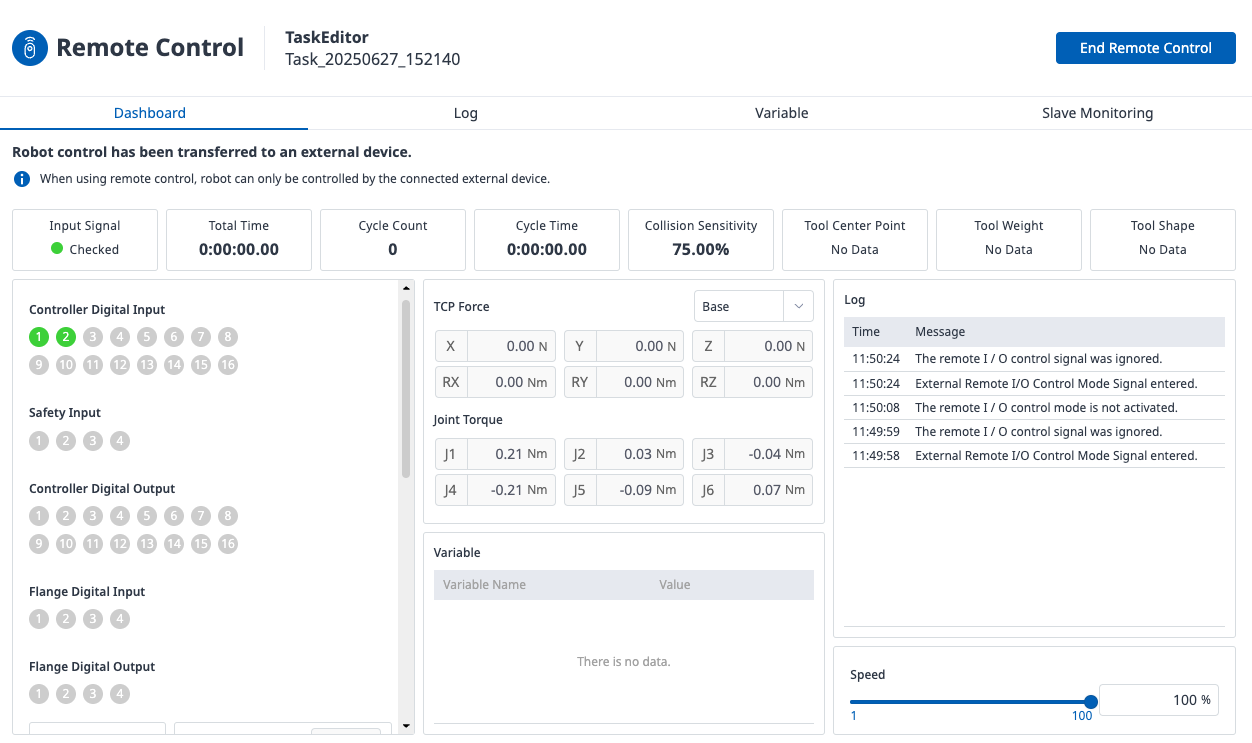
Par exemple, si vous souhaitez exécuter une tâche désignée sur le robot après être entré en mode télécommande, vous pouvez d'abord activer le servo en envoyant un signal Servo on (front montant) au port affecté, puis envoyer un signal Task Start (front montant) pour exécuter la tâche sélectionnée dans les paramètres requis.
Ces signaux sont facultatifs, de sorte que le robot peut entrer en mode télécommande sans eux. Cependant, pour utiliser ces fonctions facultatives dans le mode, vous devez affecter les ports nécessaires et appliquer correctement les signaux correspondants.