
Fonction d'arrêt de sécurité
Fonction de sécurité | Condition de déclenchement de la fonction de sécurité Événement déclencheur | Action prévue Résultat escompté | PFHd | PL, SIL | |
|---|---|---|---|---|---|
| 1 | Arrêt d'urgence | Si l'interrupteur d'arrêt d'urgence connecté à la borne EM TBSFT est enfoncé Si l'interrupteur d'arrêt d'urgence de la télécommande d'apprentissage est enfoncé | L'arrêt d'urgence est engagé en fonction du mode d'arrêt de sécurité configuré.
| 2.87E-8 /h | PL e Cat. 4 SIL 3 |
| 2 | Arrêt de protection | Si l'équipement de protection connecté à la borne PR de TBSFT est activé, | L'arrêt d'urgence est engagé en fonction du mode d'arrêt de sécurité configuré.
| 1.78E-7 /h | PL d Cat. 3 SIL 2 |
Comment reprendre le travail après un arrêt de protection
Si le point central de l'outil (TCP) du robot se trouve dans la zone de collaboration et que la fonction déplacement latéral est activée, l'utilisateur peut appliquer une force au robot directement (déplacement latéral) pour reprendre le travail. Pour plus d'informations, reportez-vous à la section Setting the Collaborative Zone et du Nudge.
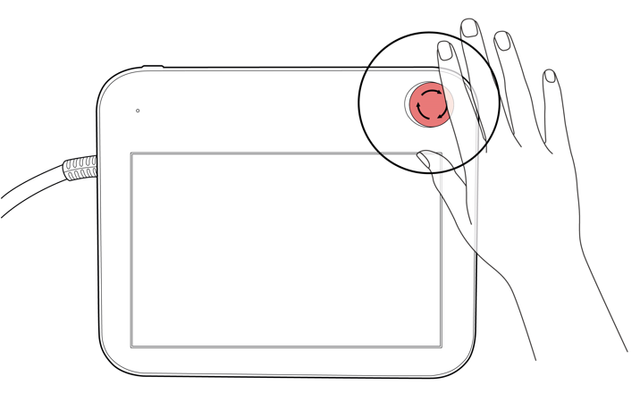
Arrêt d'urgence
bouton d'arrêt d'urgence permet d'arrêter le système en cas d'urgence. En cas d'urgence, appuyez sur le bouton d'arrêt d'urgence situé dans le coin supérieur droit du boîtier d'apprentissage pour arrêter immédiatement le système.
Remarque
Les arrêts d'urgence devraient être utilisés comme mesure de protection complémentaire, et non comme mesure de sauvegarde.
Le mode d'arrêt de sécurité pour l'arrêt d'urgence est réglé sur Arrêt de sécurité 1 (SS1) par défaut.
Des boutons d'arrêt d'urgence supplémentaires peuvent être installés si cela est jugé nécessaire suite à l'évaluation du risque pour l'application du robot.
Le bouton d'arrêt d'urgence doit être conforme à la norme CEI 60947-5-5.
Si un arrêt d'urgence est déclenché via le port défini dans E/S de sécurité, le bouton permettant d'accéder à l'écran du paramètre d'entrée de sécurité en bas de la fenêtre contextuelle d'arrêt d'urgence est activé.
Arrêt de protection
Le robot dispose également d'une fonction d'arrêt de protection qui peut arrêter le robot à l'aide d'équipements de protection sensibles à la pression, tels que des tapis de sécurité, ou des équipements de protection électrosensibles, tels que des scanners laser à barrière immatérielle.
Pour plus d'informations sur la connexion des dispositifs de protection, reportez-vous aux sections Configuration du bornier pour les entrées par contact (TBSFT) et Configuration des E/S numériques configurables (TBCI1 - 4,TBCO1 - 4).