
Noms et fonctions
Manipulateur
Noms des pièces
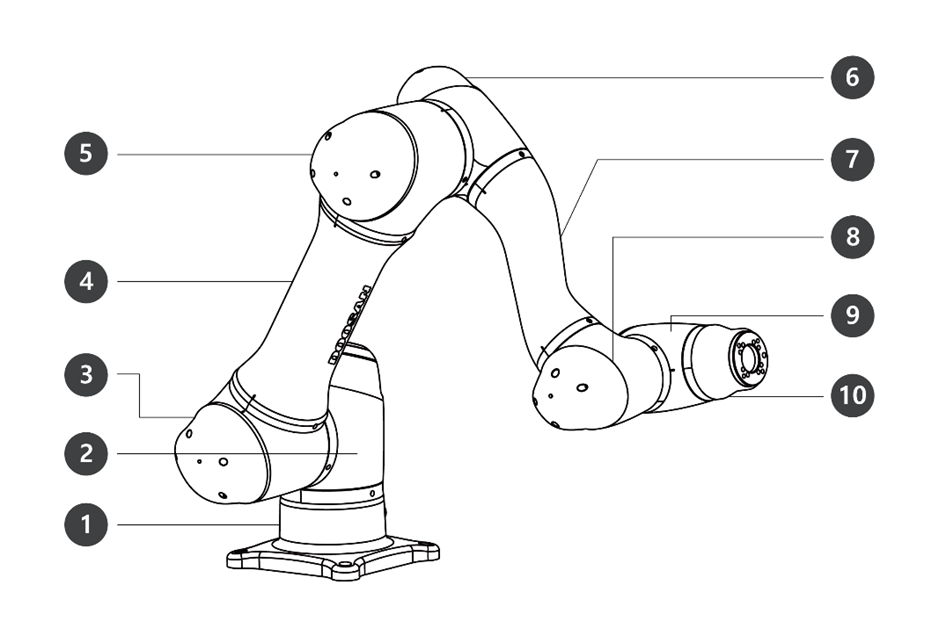
Non | Nom | Non | Nom |
|---|---|---|---|
1 | Base | 6 | J4 |
2 | J1 | 7 | Lien 2 |
3 | J2 | 8 | J5 |
4 | Lien 1 | 9 | J6 |
5 | J3 | 10 | Tôle pliée d'outil |
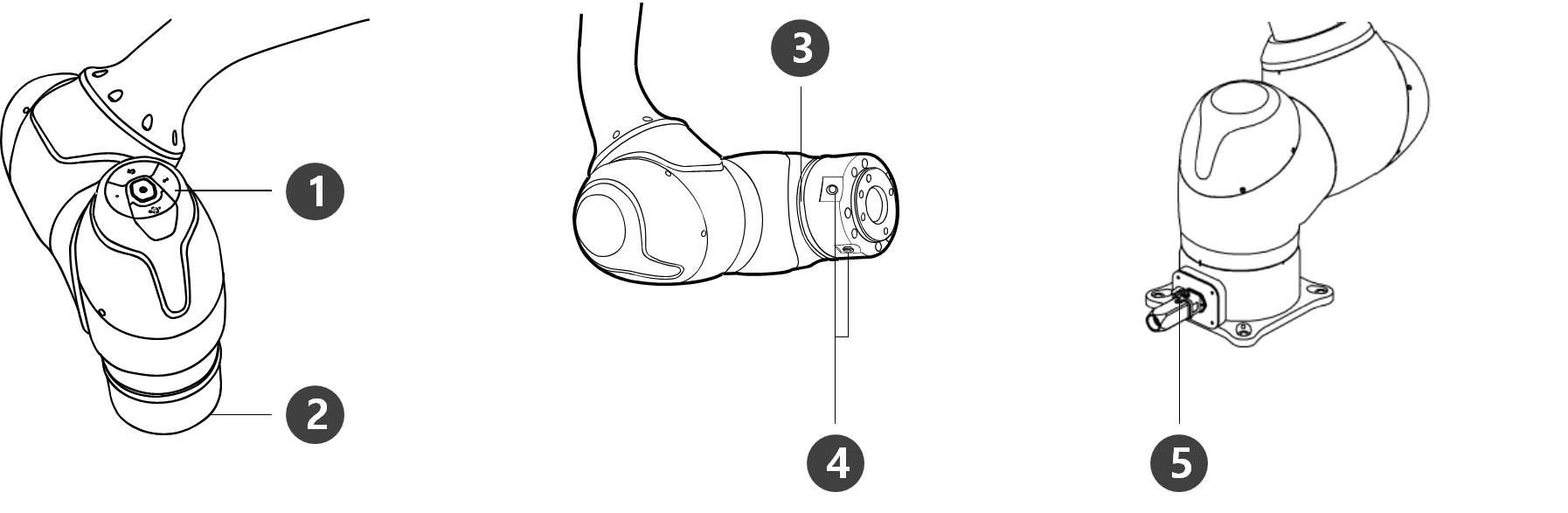
Fonctionnalités clés
Non | Article | Description |
|---|---|---|
1 | Cockpit | [Facultatif] boutons de fonctionnement pour l'apprentissage et le fonctionnement directs |
2 | Tôle pliée d'outil | Zone d'installation des outils. |
3 | LED à bride | Affiche l'état du robot avec différentes couleurs. Pour plus d'informations sur l'état du robot, reportez-vous au /wiki/spaces/TESMT/pages/54758410. Version : Série H. La série H est fournie avec une LED supplémentaire sur le 1 axes indiquant le même état et la même couleur. |
4 | E/S à bride | Port d'E/S pour le contrôle des outils. |
5 | Connecteur | Utilisé pour l'alimentation et la communication du robot. |
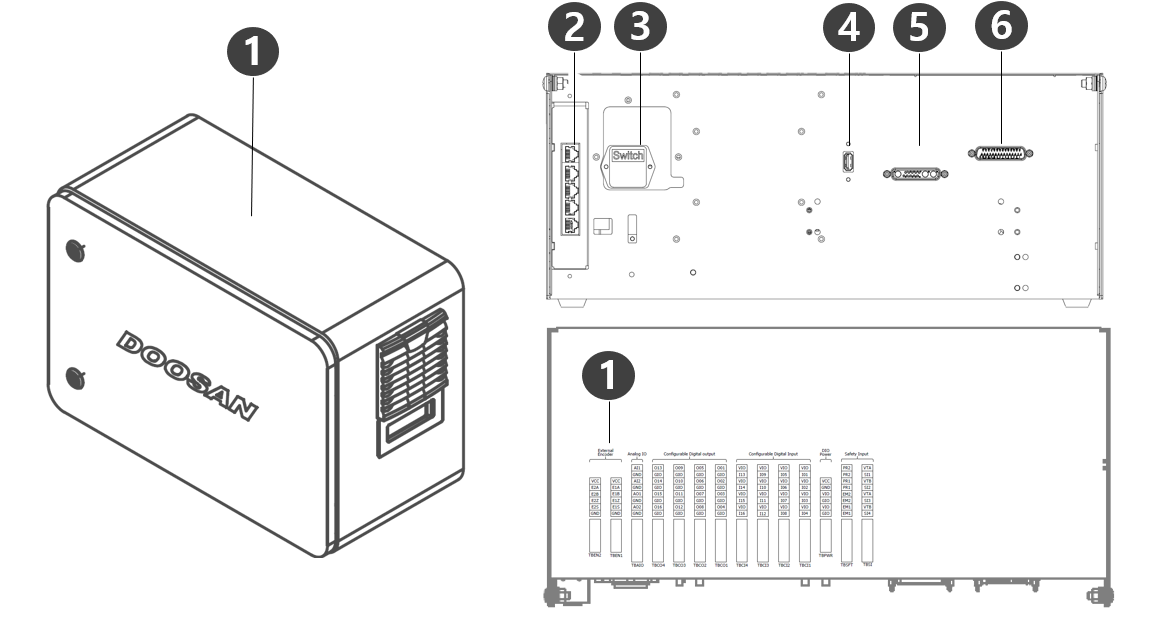
Contrôleur
Non | Article | Description |
|---|---|---|
1 | Borne de connexion E/S (interne) | Il peut être connecté aux contrôleurs ou périphériques d'autres robots. |
| 2 | Terminal de connexion réseau | Utilisé pour la connexion au terminal de connexion réseau à l'intérieur du contrôleur pour utiliser des ordinateurs portables, des périphériques TCP/IP et de l'équipement Modbus. |
| 3 | Borne/commutateur de connexion d'alimentation | Utilisé pour connecter l'alimentation secteur du contrôleur pour l'allumer ou l'éteindre. Pour plus d'informations, reportez-vous à la (3.2.1_temp-fr_FR) Mettez le système sous/hors tensionsection . |
| 4 | Borne de connexion USB | Utilisé pour stocker les journaux créés pendant que le robot fonctionne dans le stockage USB, ou exporter et importer des tâches. |
| 5 | Borne de connexion de câble manipulateur | Utilisé pour connecter le câble du manipulateur au contrôleur. |
| 6 | Terminal de connexion du câble de la télécommande d'apprentissage | Utilisé pour connecter le câble de la poignée de commande d'apprentissage au contrôleur. |
Remarque
- Si vous choisissez un contrôleur en option, consultez le manuel d'utilisation dans l'annexe pour vous connecter avant utilisation.
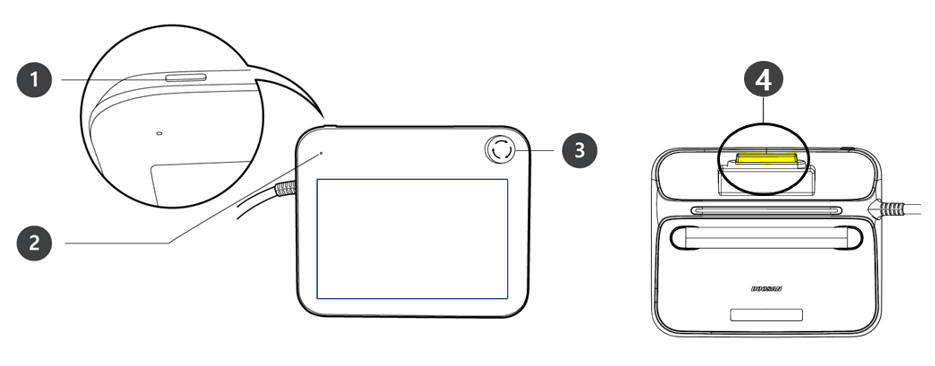
Poignée de commande d'apprentissage
Non | Article | Description |
|---|---|---|
1 | Bouton Marche/Arrêt |
|
2 | Voyant d'alimentation |
|
3 | Bouton d'arrêt d'urgence |
|
4 | Bouton de guidage manuel (3PE 3 Position Enable) Switch) |
|
Remarque
- Si le pendentif d'apprentissage doit être protégé et monté pendant le fonctionnement, le couvercle souple fourni par nous le rend plus sûr et plus facile à utiliser.
- Nouveau TP (TP-02) fonction ajoutée : double fonction de guidage manuel
- Le TP existant (TP-01) ne peut pas être utilisé dans le contrôleur intégré. (Carte des broches modifiée en raison du commutateur 3PE)
- Le nouveau TP (TP-02) peut être utilisé dans le contrôleur existant, mais la LED est changée en une seule couleur (rouge) et affichée, et des fonctions supplémentaires ne peuvent pas être utilisées.